
Fターム[3C007MS30]の内容
マニピュレータ、ロボット (46,145) | 安全 (1,176) | 作業対象物に対する安全 (43)
Fターム[3C007MS30]に分類される特許
1 - 20 / 43
干渉チェック装置及びプログラム
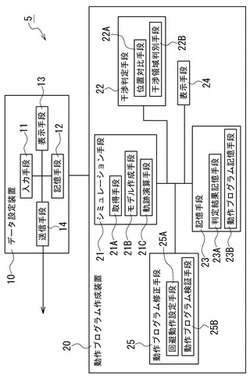
【課題】ワークとロボットからなる複数の可動物体間の干渉をチェックして、干渉が発生する動作プログラムを自動で修正する。
【解決手段】取得手段21Aが、複数の可動物体の形状データ及び動作プログラムを取得する。モデル作成手段21Bが、形状データに基づいて、複数の可動物体モデルを作成する。シミュレーション手段21が、動作プログラムと可動物体モデルに基づいて、複数の可動物体モデルの動作をシミュレーションする。干渉判定手段22が、シミュレーション結果に基づいて、複数の可動物体モデル間の干渉の有無を判定する。回避動作設定手段25Aが、干渉する可動物体モデルの動作プログラムに干渉の回避動作を設定する。動作プログラム検証手段25Bが、回避動作を設定した動作プログラムの干渉の有無を判定させる。
(もっと読む)
ロボット制御装置、ロボットシステム、及びロボット制御方法

【課題】ロボットに取り付けられたエンドエフェクターとコンベヤー上のワークとの衝突を抑制することのできるロボット制御装置、該装置を備えるロボットシステム、及びロボット制御方法を提供する。
【解決手段】ロボットコントローラー10は、エンドエフェクターがワークの上方に移動する際に、該ワークの位置の上方にエンドエフェクターが到達するために必要な水平動作時間を算出する水平動作時間算出部15aと、エンドエフェクターの速度とワークの速度とが同調するために必要な追従動作時間とを算出する追従動作時間算出部14と、エンドエフェクターがワークの上方に到達する前に、水平動作時間と追従動作時間とを比較してエンドエフェクターの下降の終了時を設定する下降設定部16とを有する。下降設定部16は、水平動作時間が追従動作時間よりも短い場合、エンドエフェクターの移動の開始時から追従動作時間の経過時以降を下降の終了時とする。
(もっと読む)
ロボットハンドの挟み込み軽減機構及びロボットハンド
【課題】高い安全性と大きな指先力を確保できるロボットハンドの挟み込み軽減機構を提供する。
【解決手段】本発明の一形態に係るロボットハンドの挟み込み軽減機構1は、駆動機構6から伝達される駆動力によって開閉する一対のハンド部2を備えるロボットハンドの挟み込み軽減機構であって、ハンド部2が開方向に回転駆動するときのみ、ハンド部2に所定の大きさの負荷が作用すると、駆動機構6からハンド部2への駆動力の伝達を減少させる過負荷軽減機構7を備える。
(もっと読む)
ロボットシステム及びロボット制御装置
【課題】ロボットアームと周囲の対象物との接触等で生じる外力を低減することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】ロボットアーム2と、ロボットアーム2に設けられロボットアーム2を駆動させる1以上のアクチュエータ41A〜47Aと、ロボットアーム2とアクチュエータ41A〜47Aとの少なくともいずれかにかかる外力を検出するセンサ部4と、アクチュエータ41A〜47Aの動作を制御するとともに、センサ部4の検出結果に基づいてアクチュエータ41A〜47Aへのトルク指令値を制限するコントローラ3と、を有して構成する。
(もっと読む)
ロボットシステムまたはロボット制御装置
【課題】冗長な自由度を有するマニピュレータをより最適に制御することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】1以上のアクチュエータを有するマニピュレータ2とこれを制御するコントローラ3とを有し、コントローラ3は、アクチュエータの内の一部を冗長軸と設定し、マニピュレータの目標位置姿勢を設定し、マニピュレータが現在の姿勢から目標位置姿勢に達するまでの動作軌跡を生成し、マニピュレータの到達可能範囲内の領域を分割して設定した小領域と各小領域に対応する冗長軸角度用パラメータとを対応付けた冗長角度定義テーブル7を有し、冗長角度定義テーブル中の該当する小領域を選択し、選択結果に基づいて冗長軸角度を設定し、動作軌跡と冗長軸角度とに基づいて動作指令を生成する。
(もっと読む)
ロボットアームの干渉回避方法
【課題】冗長性を有する多関節のロボットアームを各関節に干渉の起こらないような関節位置をとりうる全関節位置から算出し教示することなく、ロボットアームの干渉回避を行うことができるロボットアームの干渉回避方法を提供する。
【解決手段】ロボットアームを現在の姿勢から別の姿勢に移行させる際に、制御装置により予め冗長関節12,14,16の必要回転角度を演算し、この必要回転角度による各関節、各アーム及びハンドの移動予測点が進入禁止領域20に入らない場合には、前記必要回転角度を各関節の指示値として、別の姿勢にロボットアームを移行させ、移動予測点が進入禁止領域20に入る場合には、あらかじめ設定された回避動作を実行する。
(もっと読む)
2足移動体の補助装置
【目的】ロープ状の接続部材の緩み量をできるだけ少なくし、2足移動体が姿勢を崩して転倒しかけた場合、その荷重を支持するときの衝撃を減少させるようにした2足移動体の補助装置を提供する。
【解決手段】2足移動ロボット12にロープ状の接続部材(18)を介して接続されると共に、2足移動体が姿勢を崩したときに2足移動体を上方から支持するリフタ(14)からなる2足移動体の補助装置において、リフタを3次元空間において移動自在なリフタ移動手段(20、22、24、26、28、30)と、リフタ移動手段の動作を制御するリフタ制御部(38)と、3次元空間における2足移動体の位置を検出する検出手段(32、34)とを備えると共に、リフタ移動手段制御手段は、検出された位置に基づいてリフタが2足移動体に追従するようにリフタ移動手段の動作を制御するように構成する。
(もっと読む)
衝撃吸収装置の製造方法
【課題】骨格フレームと表皮からなるロボットアームの衝撃吸収装置のバリを大幅に低減すると共に、安価に製造できる製造方法を提供する。
【解決手段】マスターモデル3の表面の第1領域3´に柔軟素材の薄膜4を形成したマスターモデル3を注型用型枠5に設置してゴムまたは樹脂を注型、硬化させることにより注型型6を製作する。その注型型6からマスターモデル3を取り外すことにより第1領域3´の薄膜4を注型型6の対向面に転移させる。その後骨格フレーム1を薄膜4に密着するよう注型型6に設置し、表皮2となる素材を注型することにより衝撃吸収装置を製造する。
(もっと読む)
ロボット及びその安全制御方法
【課題】人間と同様に二足歩行をするロボットが歩行中に倒れても倒れによる被害を最小限に抑えることができるロボット及びその安全制御方法を提供する。
【解決手段】ロボットが倒れることになる場合、倒れる方向に位置しているエアーバッグを作動させながらロボットの姿勢を正姿勢に変更し、倒れによるロボットの機構部損傷を最小化し且つ使用者安全を保護することができ、ロボットが倒れた後に2次倒れが発生する場合には、2次倒れ方向に位置しているエアーバッグを作動させ、2次倒れによるロボットの機構部損傷を最小化できるシステムを提供する。
(もっと読む)
産業用ロボット
【課題】大きな搬送対象物や高価な搬送対象物の搬送に適した産業用ロボットを提供すること。
【解決手段】産業用ロボットは、搬送対象物が搭載されるハンドと、ハンドが連結されるアームと、アームを支持する支持部材と、支持部材を上下動させる上下駆動機構と、上下駆動機構を制御する制御部80とを備えている。上下駆動機構は、上下駆動機構を停止させるための2個のブレーキ機構24を備え、制御部80は、2個のブレーキ機構24を制御するブレーキ制御部84を備えている。ブレーキ制御部84は、2個のブレーキ機構24を段階的に作動させる。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置を用いてワークを搬送する際にワークが破損することを防止しつつ、パワーアシスト装置によるワークの搬送効率を改善するために、搬送途中においてワークの姿勢を容易に安定させることができるパワーアシスト装置およびその制御方法を提供する。
【解決手段】制御装置5は、角度センサ7により検出するフリージョイント4が回転を許容する任意の自由度の方向へのワーク保持装置3の回転角度θが、予め定めた下限角度θL以下である場合か、または、予め定めた上限角度θH以上である場合には、ブレーキ機構4aの解除状態を維持してフリージョイント4が回転を許容する任意の自由度の方向へのワーク保持装置3の回転を規制しないように制御する。
(もっと読む)
停止監視機能を備えたロボット制御装置
【課題】ロボット又は装置毎に動力供給を接続・遮断するためのハードウェア等を使用することなく、一方で作業者の安全を確保できる停止監視機能を備えたロボット制御装置を提供する。
【解決手段】CPU38は、各サーボモータからの位置情報に基づくロボット又は協働作業装置の位置と、侵入通知の状態とを周期的に監視し、侵入通知が最初に入力された時に、その侵入通知が割り付けられているロボット又は協働作業装置のサーボモータの位置をRAM40内に記憶する。その後、その侵入通知が入力されている間は、RAM40内に記憶された位置と、現在のサーボモータの位置との距離を計算し、その距離が許容移動距離よりも大きい場合には、非常停止手段28に指令を出し、ロボット14及び協働作業装置16の全てのサーボモータ18、20の動力を遮断する。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】急停止・急発進に伴うワークの揺れによってワークと相手ワークとが接触することを防止できるパワーアシスト装置及びその制御方法を提供する。
【解決手段】操作ハンドル6と、力センサ7と、ウィンドウ2を保持するロボットアーム3と、ロボットアーム3を駆動するアクチュエータ11と、ロボットアーム3を搬送する搬送手段14と、を備え、搬送手段14を組立ライン上を移動しているボディ100と同期して移動させて、ウィンドウ2をボディ100に組付けるパワーアシスト装置50の制御方法であって、ボディ100の動作状態が、移動状態を継続している通常時には、搬送手段14がボディと同期して移動するように制御し、ボディ100の動作状態が、移動状態から停止状態もしくは停止状態から移動状態へと変化した場合には、ロボットアーム3の駆動を、所定時間の間停止させ、所定時間が経過後、ロボットアーム3の駆動を再開する。
(もっと読む)
移動体の位置設定装置とその位置設定方法
【課題】 目視に加えて機械的な検知によって移動体を母体に非常に近接させることができる位置設定装置を提供すること。
【解決手段】 母体模型10に近接させる移動体模型20に移動体模型近似部201〜205を設定し、この移動体模型近似部201〜205に近接領域211〜215を設定し、前記移動体模型20を移動させる携帯式操作盤30を操作して移動体模型20を前記母体模型10に向けて移動させ、母体模型10の母体模型近似部101,102が前記移動体模型20に設定した移動体模型近似部201〜205に侵入すると、前記携帯式操作盤30に母体模型近似部101,102が近接領域211〜215に侵入したことを表示する。
(もっと読む)
ロボット動作範囲設定装置
【課題】ロボットの惰走距離を考慮しつつロボットの到達範囲を作成する。
【解決手段】ロボット制御装置(30)が、ロボット(20)の各軸および作業ツールの動作範囲を設定する設定手段(40)と、ロボットの動作速度および作業ツールの重量のうちの少なくとも一方に応じて定まるロボットの惰走距離を記憶する記憶手段(33)と、該設定手段により設定された動作範囲と記憶手段に記憶された惰走距離とに基づいて、ロボットが到達する到達範囲を算出する到達範囲算出手段(36)とを具備する。さらに、到達範囲を表示する表示手段(41)を具備してもよい。また、ロボットの各軸および作業ツールが動作範囲から逸脱する場合には、ロボットを停止させる停止手段(34)を具備してもよい。
(もっと読む)
ロボットアームカップリング装置の脱落防止装置
【課題】ロボットアームカップリング装置の脱落防止装置の加圧流体圧回路を改良する。
【解決手段】稼働状態ではツールの重量等が分離方向に作用するカップリングの構造において、誤動作などに伴う脱落危険を回避する機構として、流体圧回路に分離圧が負荷されないように機械的に固定する機構を一つのバルブ構造にて実現したものであって、脱落危険を回避し、安全性を向上させたロボットアームカップリング装置の脱落防止装置をシンプルな機構にて実現するものであって、この安全バルブをバルブ操作する機構として、ツールプレートを検知してスプールを操作する機構とツール置き台を検知してバルブ本体側を操作する機構を別々に設けるこにより、2ポジション切替バルブを活用して脱落防止機構を実現。
(もっと読む)
保持手段駆動装置、その制御方法及び制御プログラム
【課題】センサ等を使用しなくても、電子部品に対するより小さな荷重管理を可能とし、荷重制御の高精度化を実現可能な保持手段駆動装置、その制御方法及び制御プログラムを提供する。
【解決手段】サーボモータ18のトルク制御により、駆動部17を介して操作ロッド16を高速で下方駆動させ、吸着ノズルを押し下げる。そして、吸着ノズル11で保持された電子部品3が工程処理部2aに当接する等して停止し、電子部品3に荷重が加わると吸着ノズル11を介して操作ロッドの16の可動接触部16aが当該荷重を受け取り、バネ16bにて吸収される(バネ16bは収縮する)。これにより、操作ロッド16内のロッド16cの位置が下方に移動されるので、制御装置20は、このロッド16cの位置情報をエンコーダ19にて取得することで即座にこの可動接触部16aを介したバネ16bの収縮を検出し、サーボモータ18のトルクを制限する。
(もっと読む)
ロボットアームカップリング装置の脱落防止装置
【課題】ロボット用ATCにおいて脱落防止機能を向上した流体圧回路を提供する。
【解決手段】着脱機構における係合構造がツールプレートを装着した状態にて、ツールプレート側の重量が分離方向の負荷となって働く構造であって、 着脱制御用の着脱シリンダはマスタプレート側に設けられており、ヘッド側を結合室、ロッド側を分離室とした2室構造であり、流体圧回路は、加圧流体供給源と前記着脱シリンダの間に形成され、途中に電磁切換バルブが設けられ、さらに、当該電磁切換バルブと前記分離室側の回路の途中に一つの脱落防止検出弁が設けられており、当該脱落防止検出弁は、マスタプレートとツールプレートの関係状態を検出する機構によって弁の位置が規制されるものである。
(もっと読む)
ロボット動作範囲設定装置
【課題】ロボットの惰走距離を考慮しつつロボットの到達範囲を作成する。
【解決手段】ロボット制御装置(30)が、ロボット(20)の各軸および作業ツールの動作範囲を設定する設定手段(40)と、ロボットの動作速度および作業ツールの重量のうちの少なくとも一方に応じて定まるロボットの惰走距離を記憶する記憶手段(33)と、該設定手段により設定された動作範囲と記憶手段に記憶された惰走距離とに基づいて、ロボットが到達する到達範囲を算出する到達範囲算出手段(36)とを具備する。さらに、到達範囲を表示する表示手段(41)を具備してもよい。また、ロボットの各軸および作業ツールが動作範囲から逸脱する場合には、ロボットを停止させる停止手段(34)を具備してもよい。
(もっと読む)
ロボット教示システム及びロボット教示方法
【課題】ロボットをジョグ送り動作によって移動させる際、接触検知用センサなどを別途設けることなく、作業効率を向上させることが可能なロボット教示システム及びロボット教示方法を提供する。
【解決手段】ロボット教示システムにおいて、教示操作端末300は、ロボット100を現在位置から教示すべき目標位置へジョグ送りで移動させるジョグ送り手段を備え、ロボットコントローラ200又は教示操作端末300のいずれか一方又は双方には、目標位置の仮座標を記憶する記憶手段と、現在位置から目標位置へのジョグ送りによるロボット100の移動範囲を、仮座標と現在位置の座標の差分により定義する範囲に制限する制限手段と、を備える。
(もっと読む)
1 - 20 / 43
[ Back to top ]