
Fターム[3C269AB22]の内容
数値制御 (19,287) | 作業内容、対象機器、対象製品 (2,914) | ハンドリング作業 (150) | 組立作業、嵌め合い作業 (51)
Fターム[3C269AB22]に分類される特許
1 - 20 / 51
ロボットとその制御方法
【課題】ロボットが複数の動作を実行する場合に、そのうちの特定の動作に制限されずに、各動作における条件の変化を考慮して、各動作において正常動作中に誤作動することなく過負荷を確実に検出し安全に停止させることができるロボットとその制御方法を提供する。
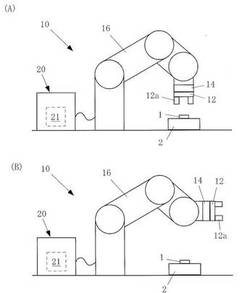
【解決手段】複数の動作を実行するロボット10の制御方法であって、エンドエフェクタ12に作用する外力を検出する力センサ14と、3次元空間内でエンドエフェクタの位置と姿勢を移動可能なロボットアーム16と、ロボットアームを制御するロボット制御装置20とを備え、(A)外力の閾値をロボットの動作毎に記憶し、(B)ロボットアームを制御して各動作を順次実行し、(C)各動作の実行中に力センサで検出された外力が、前記閾値を超えた場合に、ロボットアームを停止する。
(もっと読む)
ロボットの教示システムおよび教示方法

【課題】力制御やソフトフローティングを用いることなく、またワークを把持したロボットで作業そのものと同等の動作を必要とすることなく、組立作業の教示を行うことができるロボットの教示システムおよび教示方法を提供する。
【解決手段】ロボット1に取り付けられ、弾性的に変位可能な接触プローブ4と、ロボット1に取り付けられ、接触プローブ4と被作業対象物52との接触を検出する外力検出器2と、ロボット1の動作を制御する位置速度制御部66と、接触プローブ4の接触状態が検出された場合、接触プローブ4の位置に基づいて接触位置を導出する接触位置計算部61と、複数の接触位置から被作業対象物52の位置姿勢を計算する位置姿勢計算部62と、計算された被作業対象物52の位置姿勢に基づきロボットの組み付け作業プログラムを生成する作業プログラム生成部63を備える。
(もっと読む)
ロボット教示方法、ロボット教示装置およびプログラム
【課題】ロボットが実行する作業に関する情報を簡便に教示できるロボット教示方法を提供する。
【解決手段】ロボット教示方法は、ワーク10に対して行なう作業に関わる動作をロボット1へ教示するための方法であって、ロボット1に備えられたカメラ6によって、マーカー15を有するワーク10の撮像を取得する撮影ステップ(ステップS2)と、当該撮像からマーカー15を検出する検出ステップ(ステップS3)と、マーカー15を解析して、ロボット1が動作をするための教示情報を取得する解析ステップ(ステップS4、S5)と、教示情報を記憶する記憶ステップ(ステップS6)と、を有する、ことを特徴とする。
(もっと読む)
ロボットプログラミング装置および方法
【課題】ロボットの任意の停止状態から所望の動作を実行させる際に工程を選択できるようにプログラミングを行うロボットプログラミング装置等を提供する。
【解決手段】ロボットを使用した組み立てセルのロボットが行う独立した作業を単位とした作業ブロックを実行順に接続して工程フローを作成し、工程フローからロボットプログラムを生成する装置であり、停止ブロック検出手段で検出された停止ブロックと、表示手段に表示した停止ブロックを考慮した外部入力に従って実行ブロック指定手段から得た停止状態から実行する実行ブロックとの位置情報とハンド状態とセンサ状態をそれぞれ比較し、停止ブロックの停止状態を起点として実行ブロックを実行するための一時実行プログラムおよび一時実行作業指示を生成し、表示手段に一時実行作業指示を表示すると共に、入出力手段から一時実行プログラムを出力する工程再構築手段を備えた。
(もっと読む)
ロボットのコントローラ
【課題】ロボットのコントローラにおいて、特別なハードウェアを追加することを抑制しつつ、被検出対象が異常であることをより確実に検出する。
【解決手段】ロボットのコントローラ20は、メイン制御基板21及び第1サブ制御基板22を備える。制御基板21,22の各FPGA31は、所定速度でカウントを行うタイムカウンタTCを有し、タイムカウンタTCの値に基づいて所定規則で1ビットの参照値及び信号値POUTをそれぞれ算出し、タイムカウンタTCの値が所定値になった時に、1ビットの信号値POUTの入力及び1ビットの信号値POUTの出力をそれぞれ行う。制御基板21のFPGA31は、信号値POUTが参照値と一致しないことを条件として異常であることを検出する。第1CPU34は、上記2つのタイムカウンタTCの値を一致させた後に、制御基板21のFPGA31に異常の検出を開始させる。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】物体の位置を高速に且つ高精度に検出する。
【解決手段】位置検出装置30は、微細な軸穴とこの軸穴を含むマーカーとを設けたオブジェクトを含む画像データを取得する画像データ取得部31と、マーカーをゴール位置に対応付けたマーカーゴール画像データを記憶するマーカーゴール画像記憶部32と、軸穴の軸中心をゴール位置に対応付けたターゲットゴール画像データを記憶するターゲットゴール画像記憶部36と、マーカーゴール画像データを用いて、画像データ取得部31が取得した画像データからマーカーを検出するマーカー検出部33と、ターゲットゴール画像データを用いて、画像データ取得部31が取得した画像データにおける、マーカー検出部33が検出したマーカー内から軸穴を検出するターゲット検出部37とを備えた。
(もっと読む)
プログラム作成装置及びプログラム作成方法
【課題】作業ブロックの設定作業において作業者の負担を軽減する技術を提供する。
【解決手段】プログラム作成装置は、作業ブロック定義部41と、工程フロー編集部42と、制御プログラム生成部43とを備える。工程フロー編集部42は、複数の作業ブロック情報を所望の順序で並べて得られる工程フローにおいて、処理対象作業ブロック情報よりも後続の設定対象ブロック情報の内部状態情報を、当該処理対象ブロック情報の事後条件を用いて設定する。制御プログラム生成部43は、工程フロー編集部43により内部状態情報が設定された複数の作業ブロック情報に基づいて制御プログラムを生成する。
(もっと読む)
ロボットの教示再生装置および教示再生方法
【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
座標補正方法
【課題】タクトタイムの増加を防ぎつつ精度よく誤差を補正することを可能にする座標補正方法を提供する。
【解決手段】作業に先立って、各位置決めステージA、Bでの搬送手段4とマニピュレータ5、6を含む機械座標系に由来する誤差を検出して第1の補正テーブルを作成し、この第1の補正テーブルに基づいて作業時に機械座標系に由来する誤差を補正する第1の補正と、作業時に、いずれかの位置決めステージA、Bで、複数の作業対象物2、3のそれぞれの寸法公差に由来する誤差を検出して第2の補正テーブルを作成し、この第2の補正テーブルに基づいて各作業対象物2、3の寸法公差に由来する誤差を補正する第2の補正とによって、作業対象物2、3上の作業位置とエンドエフェクタ7、8の相対的な位置ズレを補正するようにした。
(もっと読む)
ロボットシステム、その制御装置及び方法
【課題】サイクルタイムを増加させることなく、ハンドで把持した作業対象物の位置姿勢計測及び位置姿勢修正を行えるようにする。
【解決手段】アーム先端部11の位置姿勢を制御可能なアーム1と、アーム先端部11に取り付けられ、作業対象物3を把持する把持機構21を具備し、把持した作業対象物3のアーム先端部11からの相対位置姿勢を制御可能なハンド2と、把持した作業対象物3のアーム先端部11からの相対位置姿勢計測を行う位置姿勢計測装置22とを備えたロボットシステムにおいて、把持機構21で作業対象物3を把持した後、アーム先端部11が移動している最中に、作業対象物2のアーム先端部11からの相対位置姿勢の計測を行い、その位置姿勢計測の結果に基づいて、作業対象物3がアーム先端部11からの所定の相対位置姿勢をとるように、ハンド2のアーム先端部11からの相対位置姿勢の修正を行う。
(もっと読む)
ロボットの教示装置、およびロボットの制御装置
【課題】ロボットのハンドツールに作用する力とモーメントとが略ゼロである、ハンドツールによって部品を把持してワークに組付ける動作をロボットに短時間で教示する。
【解決手段】ハンドツールを備えたロボットに動作を教示する教示装置であって、部品組付け方向と直交する方向にハンドツールを平行移動させて該ハンドツールの位置を調整する平行移動操作手段60a〜62bと、ハンドツールを組付け方向と直交する方向に延びる回転中心線を中心として回転させて該ハンドツールの姿勢を調整する回転操作手段64a〜66bと、ハンドツールに作用する力とモーメントを検出する力覚センサと、ハンドツールに作用する力とモーメントとが略ゼロの該ハンドツールの位置と姿勢とを作業者が特定するときにすべき平行移動操作手段と回転操作手段に対する操作の情報を、力覚センサの検出結果とハンドツールの位置と姿勢とに基づいて表示する表示手段50とを有する。
(もっと読む)
ロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダント
【課題】作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置や向きの変更を繰り返すティーチング作業を行うことなく、自動的にティーチングを行うことが可能なロボット制御システムの教示方法およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】
教示方法の一実施形態は、トレイ20のマーカー23が含まれるように可搬型カメラ8で撮像する第1撮像工程と、その画像からマーカー23を検出して、トレイ20毎に予め登録されているデータとの照合などの判断を行う第1画像処理工程と、該当するマーカー23に応じた初期位置へロボットハンド31を移動させる初期移動工程と、ロボットハンド31の小型カメラ34によってマーカー23の少なくとも1つが含まれるように撮像する第2撮像工程と、その画像からマーカー23の位置誤差を検出する第2画像処理工程とを含む。
(もっと読む)
ロボットの教示装置、及びロボットの制御装置
【課題】部品の種別毎に必要であったロボットの動作範囲や力覚センサ出力の許容範囲に関する作業者の初期設定作業を省略することができ、作業者による教示作業の負担を軽減させることができるロボットの教示装置、及びロボットの制御装置を提供する。
【解決手段】経路教示系127は、被組付ワーク150への組み付けが完了した状態の組付ワーク140をロボットハンド102に把持させ、組付ワーク140に過大な力が作用しないロボットハンド102の位置姿勢を探索しながら、ロボットハンド102に組付ワーク140の引抜動作を実行させる。経路教示系127は、その引抜動作の際に、ロボットハンド102の引抜移動経路を取得する。経路教示系127は、取得した引抜移動経路を時系列逆順に辿る経路を、組付作業経路として生成し、その生成した組付作業経路を動作制御部121に教示する。
(もっと読む)
ロボットの教示データを作成する方法およびロボット教示システム
【課題】ロボットの教示データを作成する方法およびロボット教示システムにおいて、ロボットアームを含むロボットの教示を簡単に行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示画像取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手首22の位置および向きを表す手首座標を決定し(手首座標決定ステップ、ステップS2)、手首座標に基づいて、ロボットアーム110の動作を教示するロボットアーム教示データを作成する(ロボットアーム教示データ作成ステップ、ステップS11)。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行中に、対象物が検知された場合、視覚サーボ制御を実行する。装置は、この視覚サーボ制御を実行する上で、マニュピュレータの所定の状態に基づいて、視覚サーボ制御係数に含まれる係数の少なくとも一部を変更する(例えば実施形態におけるビジュアルインピーダンス制御の移動処理のステップS32,S33,S36,S37)。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】マニュピュレータを対象物まで短時間で移動させること。
【解決手段】対象物であるボルト穴を視認可能なカメラが取り付けられたマニュピュレータを、複数の対象物まで移動させる制御を行う装置が、複数の対象物の各々の位置に対応させて予め設定された目標位置TPi’に向けて、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3)。装置は、マニュピュレータが目標位置TPi’に移動した場合、目標位置TPi’に対応する実穴位置Hiについての実誤差量diを検出する(ステップS5)。装置は、実誤差量d1乃至diの履歴のうち、少なくとも1回分の履歴を用いて、次のi+1回目の目標位置TPi+1’を更新する(ステップS10,S12,S13)。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物が検知されていない場合、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS1)。装置は、対象物が検知された場合、目標位置よりも対象物に近い位置を新たな目標位置として、新たな目標位置までの新たな経路を設定して、移動制御を切り替えるための切替条件が満たされるまでの間、新たな経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3及びS4)。装置は、切替条件が満たされた場合、視覚サーボ制御を実行する(ステップS5)。
(もっと読む)
溶接ワーク位置検出方法
【課題】スポット溶接システムにおいて、溶接ワーク、スポット溶接ガン及び多関節ロボットの剛性に依存することなく、溶接ワークの対向電極側表面位置を正確に検出する。
【解決手段】サーボモータ34によって駆動される可動電極30とこれと対向して配置される対向電極32とを有するスポット溶接ガン14と、溶接ワークWとスポット溶接ガンの一方を保持する多関節ロボット12とを備えるスポット溶接システムにおいて、可動電極を溶接ワーク表面に接するように位置決めした後、サーボモータで可動電極を対向電極に接近させる方向に移動させると同時に、多関節ロボットを用いて対向電極と溶接ワークとを接近させる方向に同じ速度で相対移動させながら、可動電極の移動速度及び加速度の少なくとも一方を監視することにより、対向電極と溶接ワークとの接触を検出し、このときの対向電極の位置から溶接ワークの対向電極側表面位置を検出する。
(もっと読む)
ロボット制御システム、ロボット制御方法
【課題】高速かつ遅延の少ないデータ送受信をPCと動作制御装置との間で行うことができるロボット制御システムおよびロボット制御方法を提供することを課題としている。
【解決手段】ロボット制御システム1は、動作制御装置2と動作指示装置3を備え、動作制御装置2は、通信部201と、プロキシ部202と、プログラム記憶部203と、コントローラー統括部204と、プログラム実行部205と、ロボット制御部206とを備え、ロボット4が接続されている。動作指示装置3は、通信部301と、プロキシ部302と、データ読出・書込部303と、データ記憶部304と、プログラム部305と、入出力部306とを備え、画像表示装置5と入力装置6が接続されている。また、動作制御装置2と動作指示装置3は、LAN等のネットワークやUSB I/Fを介して接続している。
(もっと読む)
ロボットの制御方法
【課題】 ロボットと位置検出カメラ間の座標軸の回転方向のずれを修正するロボットの制御方法を提供する。
【解決手段】 XY平面上に設定した3点以上の計測位置と前記XY平面に垂直なZ軸方向に設定した2点以上の計測位置に対し、前記ロボットを操作し前記三次元位置計測装置によって前記各計測位置の位置座標を計測し、前記三次元位置計測装置の座標系における各計測位置の位置座標と前記ロボットの動作量に基づいて、前記三次元位置計測装置の座標系から前記ロボットの座標系への変換係数を算出し、前記三次元位置計測装置より計測した対象物の位置情報を前記変換係数によって変換し、この変換した値に基づいて前記ロボットを動作させる。
(もっと読む)
1 - 20 / 51
[ Back to top ]