
Fターム[3C269JJ09]の内容
数値制御 (19,287) | 位置検出信号、位置検出手段の種類 (830) | 具体的検出手段の限定 (288) | 撮像手段、画像処理手段 (101)
Fターム[3C269JJ09]に分類される特許
1 - 20 / 101
侵入検出装置,ロボット,侵入検出方法および侵入検出プログラム
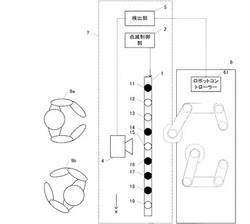
【課題】特定領域への侵入を遅延無く検出する。
【解決手段】侵入検出装置は,侵入検出装置は,侵入を検出する境界に沿って前記境界に近接して配列された複数の光マークからなる光マーク列と,光らせる前記光マークを時刻によって異らせる制御信号であって,任意の時刻において,前記光マーク列の一部に対応する前記制御信号の一部は,前記光マーク列の他の一部に対応する前記制御信号の他の一部の誤り検出符号である前記制御信号を生成する点滅制御部と,前記光マーク列からの光を受光し前記光に応じた信号を出力する光センサーと,前記光センサーが出力する信号を前記光マーク毎に二値化した受光信号を生成し,前記光マーク列の他の一部に対応する前記受光信号の第一部分に基づいて前記誤り検出符号の検査値を生成し,前記光マーク列の一部に対応する前記受光信号の第二部分と前記検査値とを比較した結果に基づいて前記侵入を検出する検出部と,を備える。
(もっと読む)
通信システム、制御装置、通信装置、制御方法、通信方法、及びプログラム

【課題】 伝送遅延を考慮するのみでは、フィードバック制御を行う周期を最速化することが困難であった。
【解決手段】 制御装置は、通信を介して所定の動作を実行する複数の駆動装置を制御する制御装置であって、複数の駆動装置のそれぞれが信号を受信して当該信号に応じて動作を実行できる状態となるまでの駆動準備時間と、複数の駆動装置のそれぞれと制御装置との信号の伝送に要する伝送遅延とを取得し、駆動準備時間と伝送遅延とに基づいて、複数の駆動装置を制御するための信号を当該複数の駆動装置へ送信する順序を決定し、決定した順序に基づいて、複数の駆動装置へ信号を送信する。
(もっと読む)
ロボットシステム
【課題】スリット光の予測投影領域を最適化することによってロボットによるワークの取出作業の速度および精度を向上させることができるロボットシステムを提供すること。
【解決手段】実施形態の一態様に係るロボットシステムは、投影部と撮像部と予測投影領域決定部と投影位置検出部とロボットとを備える。投影部は、ワークが載置される載置領域へスリット光を投影して所定の移動方向へ移動させる。撮像部は、ワーク上を移動するスリット光を順次複数回撮像する。予測投影領域決定部は、撮像された画像を移動方向と交差する交差方向へ横断し、画像における交差方向の中央に近いほど移動方向と平行な方向の長さが長くなるように、画像におけるスリット光の予測投影領域を決定する。投影位置検出部は、予測投影領域の中からスリット光の投影位置を検出する。ロボットは、検出された投影位置に基づいてワークを把持する。
(もっと読む)
6軸ロボットの軸間オフセット検出方法
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、先端2軸直交点(第5軸と第6軸との交点)をロボット座標のX軸上の複数の移動目標位置(白抜き丸印)に移動させる。各移動目標位置で、発光ダイオードを第6軸を中心に回転させてその回転軌跡を3次元計測器により計測すると共に、発光ダイオードを第5軸を中心に回転させてその回転軌跡を3次元計測器により計測する。そして、2つの回転軌跡から2つの回転中心線を求め、両回転中心線の交点を先端2軸直交点の実際の移動位置(×印)とし、移動目標位置と実際の移動位置との誤差から軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
ロボット制御システム、ロボットシステム及びプログラム
【課題】 動作の記述に用いられる命令の処理対象が集合パラメーターであったとしても、動作における命令の構成を変更することなく、容易に所望の動作を実現するロボット制御システム、ロボットシステム及びプログラム等を提供すること。
【解決手段】 ロボット制御システムは記憶部110と、命令を実行する処理部120と、処理部120の処理結果に基づきロボット30の制御を行うロボット制御部(ロボット制御装置50)を含み、記憶部110は処理部120が実行する命令の情報と命令の処理対象を表すパラメーターの情報を記憶し、処理部120は命令が複数の命令により構成されるシーケンス命令であり且つシーケンス命令のパラメーターの属性が集合パラメーターの属性である場合に、シーケンス命令を構成する複数の命令を変更することなく、パラメーターを変えながらシーケンス命令を複数回実行する。
(もっと読む)
ロボットの教示システムおよび教示方法
【課題】力制御やソフトフローティングを用いることなく、またワークを把持したロボットで作業そのものと同等の動作を必要とすることなく、組立作業の教示を行うことができるロボットの教示システムおよび教示方法を提供する。
【解決手段】ロボット1に取り付けられ、弾性的に変位可能な接触プローブ4と、ロボット1に取り付けられ、接触プローブ4と被作業対象物52との接触を検出する外力検出器2と、ロボット1の動作を制御する位置速度制御部66と、接触プローブ4の接触状態が検出された場合、接触プローブ4の位置に基づいて接触位置を導出する接触位置計算部61と、複数の接触位置から被作業対象物52の位置姿勢を計算する位置姿勢計算部62と、計算された被作業対象物52の位置姿勢に基づきロボットの組み付け作業プログラムを生成する作業プログラム生成部63を備える。
(もっと読む)
ロボットの関節の原点補正方法およびそのシステム
【課題】高精度且つ安価にロボットの関節を原点補正する。
【解決手段】第1の姿勢P1(l)のロボット12のマーカー22が撮影画像に写る位置にカメラ16を設置する。各関節用のエンコーダの出力値に基づいて、原点補正対象の関節12lに予め対応付けされた関節のみを動かすことにより、カメラ16の撮影画像上において第1の姿勢時のマーカー22の位置の近傍にマーカー22が写るような第2の姿勢P2(l)に変更する。ロボット12の姿勢変更によるカメラ16の撮影画像上におけるマーカー22の変位に基づいて、原点補正対象の関節12lの原点補正を行う。
(もっと読む)
ロボット制御装置、ロボット制御方法、プログラム及び記録媒体
【課題】カメラの位置がばらついても、カメラ座標系とロボット座標系と校正を行うことなく、第1のワークに対するハンド部の把持位置がばらついたり第1のワークが変形したりしても、精密組立を可能とする。
【解決手段】カメラ座標系におけるハンド部の第1の座標系CA、第1のワークの第2の座標系CB、第2のワークの第3の座標系CCを算出する(S2,S3,S4)。第1の座標変換行列ATB、第2の座標変換行列ATCを算出する(S5,S6)。注目点の座標データを、第1のワークの座標系で設定する(S7)。教示点の座標データを、第2のワークの座標系で設定する(S8)。注目点の座標データを、第1の座標変換行列ATBを用いて座標変換する(S9)。教示点の座標データを、第2の座標変換行列ATCを用いて座標変換する(S10)。変換した座標データを用いて動作指令を作成する(S11)。
(もっと読む)
テレビカメラを取り付けた数値制御機器のテレビモニター画面の操作方法
【課題】数値制御機器の複雑な操作方法を簡単にする。
数値制御機器の操作範囲を広げる。
数値制御機器の操作精度を良くする。
【解決手段】数値制御機器の可動部にテレビカメラを取り付け、そのテレビカメラの撮影した画像を写すテレビカメラモニター画面上の全ての位置で、その数値制御機器を相対的に操作する。
数値制御機器のテレビカメラの撮影する方向を変えることで、テレビカメラモニター画面上で操作する数値制御機器の操作範囲を広げることが出来る。
数値制御機器の可動部に取り付けたテレビカメラの撮影する画像の大きさを変えて、その数値制御機器の操作の分解能を良くする。
(もっと読む)
ロボット制御装置、ロボットシステム、及びロボット制御方法
【課題】ロボットに取り付けられたエンドエフェクターとコンベヤー上のワークとの衝突を抑制することのできるロボット制御装置、該装置を備えるロボットシステム、及びロボット制御方法を提供する。
【解決手段】ロボットコントローラー10は、エンドエフェクターがワークの上方に移動する際に、該ワークの位置の上方にエンドエフェクターが到達するために必要な水平動作時間を算出する水平動作時間算出部15aと、エンドエフェクターの速度とワークの速度とが同調するために必要な追従動作時間とを算出する追従動作時間算出部14と、エンドエフェクターがワークの上方に到達する前に、水平動作時間と追従動作時間とを比較してエンドエフェクターの下降の終了時を設定する下降設定部16とを有する。下降設定部16は、水平動作時間が追従動作時間よりも短い場合、エンドエフェクターの移動の開始時から追従動作時間の経過時以降を下降の終了時とする。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】物体の位置を高速に且つ高精度に検出する。
【解決手段】位置検出装置30は、微細な軸穴とこの軸穴を含むマーカーとを設けたオブジェクトを含む画像データを取得する画像データ取得部31と、マーカーをゴール位置に対応付けたマーカーゴール画像データを記憶するマーカーゴール画像記憶部32と、軸穴の軸中心をゴール位置に対応付けたターゲットゴール画像データを記憶するターゲットゴール画像記憶部36と、マーカーゴール画像データを用いて、画像データ取得部31が取得した画像データからマーカーを検出するマーカー検出部33と、ターゲットゴール画像データを用いて、画像データ取得部31が取得した画像データにおける、マーカー検出部33が検出したマーカー内から軸穴を検出するターゲット検出部37とを備えた。
(もっと読む)
位置決め制御装置およびこれを備えた位置決め装置
【課題】 カメラで位置決め対象を撮影する位置決め制御装置で、高精度な位置決め動作を可能とする。
【解決手段】 位置決め対象を撮像した時刻が特定できる撮像時刻特定信号と検出位置とを出力する画像処理装置30、および撮像時刻特定信号が取得された時刻の位置決め対象を移動させるモータ53、56の回転位置から所定時間前の回転位置を計算し、該計算値と検出位置と目標位置とに基づき、位置決め対象が目標位置になるようにモータ53、56を制御する駆動制御装置40を備え、位置決め対象を静止中に撮像して位置決め対象が目標位置になるように制御した場合の第1の回転位置と、移動中に撮像して位置決め対象が目標位置になるように制御した場合の第2の回転位置とを予め取得し、前記所定時間を第1の回転位置と第2の回転位置とに基づいて決定する。
(もっと読む)
部品実装装置及び部品実装方法
【課題】撮像手段が基板加熱ヒータによって加熱される状況が、部品装着前の位置合わせ時と部品装着時とでほぼ一致するようにして部品の装着精度を向上させることができるようにした部品実装装置及び部品実装方法を提供することを目的とする。
【解決手段】治具部品載置部AR2に載置された治具部品JGを上方から撮像カメラ16により撮像して第1の撮像画像を取得するとともに、装着ヘッド15によりピックアップした治具部品JGを下方から撮像カメラ16により撮像して第2の撮像画像を取得して装置誤差を検出するとき、撮像カメラ16が基板加熱ヒータH2によって加熱される状況が、その後、部品3と部品装着部位2aとの位置合わせ時に撮像カメラ16が基板加熱ヒータH2によって加熱される状況に近くなるように治具部品載置部AR2の選択を行う。
(もっと読む)
曲面塗装装置
【課題】曲率が一定でない曲面の塗装面に対しても均一な厚みの塗膜が得られる曲面塗装装置を提供する。
【解決手段】曲面塗装装置100は、高速で塗料の吐出と吐出停止が切り替え可能で、且つ塗料の吐出時間と吐出停止時間の制御可能なノズル2と、ノズル2が取り付けられ、該ノズル2の塗料吐出口を被塗物1の塗装面に対向するように該ノズルの移動可能なロボットアーム4と、ロボットアーム4を制御するロボットコントローラ5と、ノズル2の塗料吐出時間と吐出停止時間の制御可能なノズル駆動回路7と、ロボットコントローラ5及びノズル駆動回路7を制御する主制御装置6とを備え、主制御装置6は、被塗物1の表面を仮想の三次元マトリクス面によって多数の微小塗面12に分解し、各微小塗面に対してノズル2の塗料吐出口が対向するようにロボットコントローラ5を制御すると共に、ノズル2が対向する微小塗面12の面積に応じた塗料の量を吐出するようにノズル駆動回路7を制御する。これにより、曲面の塗装面に対する塗膜の厚みを均一にする。
(もっと読む)
ロボット制御装置
【課題】多関節ロボット本体の制御において、軌道計算が複雑で計算の所要時間が不定であっても、複雑な軌道計算と、同期動作とを並行して実行する必要がある。
【解決手段】ロボット制御装置200は、共有メモリ203と、共有メモリ203にアクセス可能に接続された第1の処理部201及び第2の処理部202と、を備えている。第1の処理部201は、多関節ロボット本体を目標位置姿勢に動作させるコマンドから各アーム用モータに出力する指令値の連なりを示す動作指令データBを計算し、計算結果である動作指令データBを共有メモリ203に格納する軌道計算処理を行う。第2の処理部202は、共有メモリ203に格納された動作指令データBを取得して、指令値を各アーム用モータに一定の時間間隔で同期して出力する同期処理を行う。
(もっと読む)
数値制御工作機械
【課題】テーブル上に治具等を介して取り付けられたワークの実際の三次元の状態を迅速に計測することができる数値制御工作機械を提供する。
【解決手段】工具101の長さ及び径を計測する工具計測センサ104と、ワーク1の三次元的な形状と位置及び向きとをレーザ光等により非接触で計測するワーク計測センサ105と、ワーク計測センサ105からの情報に基づいて、加工開始点の位置及び基準面の傾きを求めた後、入力されている加工プログラムに基づいて、センサ104,105からの情報並びに加工開始点の位置及び基準面の傾きから、ワーク1に対して加工を施すように主軸102等の作動を制御しながら、工具101がワーク1に接触せずに移動する非加工領域に位置しているときに、加工プログラムでの工具101の移動速度よりも速く工具101を移動させるように主軸102等の作動を制御する制御装置106とを備える数値制御工作機械100とした。
(もっと読む)
数値制御工作機械
【課題】テーブル上に治具等を介して取り付けられたワークの実際の三次元の状態を迅速に計測することができる数値制御工作機械を提供する。
【解決手段】工具101の長さ及び径を計測する工具計測センサ104と、ワーク1の三次元的な形状と位置及び向きとをレーザ光等により非接触で計測するワーク計測センサ105と、ワーク計測センサ105からの情報に基づいて、加工開始点の位置及び基準面の傾きを求めた後、入力されている加工プログラムに基づいて、センサ104,105からの情報並びに前記加工開始点の位置及び前記基準面の傾きから、ワーク1に対する加工を目的とする最終形状までシミュレーションで行うことにより、規定値以上の加工負荷の有無及び前記ワークに対する取り残しの有無を求め、求められた結果を表示装置112で表示させる制御装置106とを備える数値制御工作機械100とした。
(もっと読む)
成形品トリム加工方法
【課題】金型修正を繰り返すことなく、トリム加工を行うことができる成形品トリム加工方法を得る。
【解決手段】製品設計CADデータに応じて作成した金型によりプレス成形して成形品4を作成し(S50〜S54)、成形品4の形状を3次元測定機6により3次元測定して成形品測定データを得る(S56)。製品設計CADデータと成形品測定データとに基づいて成形品4のトリムライン32,34を成形品測定データの座標系で作成し(S58)、レーザ切断機14上に載置した成形品4の取付姿勢を測定してトリムライン32,34をレーザ切断機14の座標系に変換し(S60,S62)、レーザ切断機14により成形品4をトリムライン32,34に基づいて切断する(S64)。
(もっと読む)
梱包用受け型の作製方法
【課題】搬送時の振動や衝撃による力が被搬送物の表面に均等に加わるようにすることができる梱包用受け型を作製する方法を提供する。
【解決手段】非接触レーザースキャナ2を用いて被搬送物である彫像の外形データを取得するスキャニング工程と、上記彫像の外形データを用いて等身大の雌型データを作成するデータ作成工程と、上記雌型データを数値制御工作機械に与えて発泡スチロールなどの緩衝体を加工して上記梱包用受け型を作製する受け型作製工程と、を行う。
(もっと読む)
障害物回避支援装置、障害物回避支援方法及び移動体
【課題】最近接距離の点の切り替わりが発生する状況において、移動体の障害物の回避動作を支援するのに好適な障害物回避支援装置、障害物回避支援方法及び障害物回避支援装置を備えた移動体を提供する。
【解決手段】障害物回避支援部101を、レーザーレンジセンサ200で測定した障害物の距離情報をメモリに記憶する距離情報記憶部110と、メモリに記憶された距離情報に基づき斥力を計算する斥力計算部111と、計算された斥力を軸方向の成分に分離する斥力成分分離部112と、分離された軸成分から軸毎に正方向の最大値と負方向の最大値とを抽出し、軸毎に抽出した正方向と負方向の最大値の和を計算し、計算結果を各軸の軸成分とした回避用斥力を生成する回避用斥力生成部113とを含む構成とした。
(もっと読む)
1 - 20 / 101
[ Back to top ]