
Fターム[3C269QC05]の内容
Fターム[3C269QC05]に分類される特許
1 - 20 / 37
手動送り速度を変更可能な数値制御装置
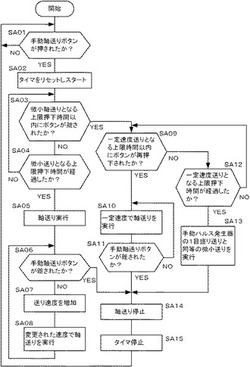
【課題】ボタンの押し方によって、ダイナミックに手動送り速度を変更可能にし、軸の位置決めを容易に行うことが可能な手動送り速度を変更可能な数値制御装置。
【解決手段】手動軸送りボタン(以下、「BU」という)が押されると、押下時間を判断するためのタイマが起動する。BUが微小軸送りとなる上限押下時間より長く押され続けると、押されている間、送り速度を連続して増加させながら軸の移動を行なう。BUが離されると、軸移動を停止し、タイマを停止する。BUが微小軸送りとなる上限押下時間より短く押された場合、一定速度送りとなる上限時間以内にBUが再押下されないと、手動パルス発生器の1目盛りと同等の微小送りを行なう。移動が完了すると、軸移動を停止し、タイマを停止する。一定速度送りとなる上限時間以内にBUが再押下されると、押されている間、一定速度で軸の移動を行なう。BUが離されると、軸移動を停止し、タイマを停止する。
(もっと読む)
自動的に加工方向を切換え可能な手動加工機能を備えた数値制御装置

【課題】並行方向と垂直方向の移動方向の切換え操作を不要とする手動加工機能を備えた数値制御装置。
【解決手段】補間のためのパルス信号の出力は0か否か判断し、出力が0でない場合には自動切換えフラグFAを0とし、出力が0の場合には自動切換えフラグFAは0か否か判断し、FAが0の場合には時間カウンタをインクリメントし、FAが0でない場合には時間カウンタをクリアする(SA01〜SA05)。時間カウンタの時間は設定した時間を超過したか否か判断し、時間カウンタの時間が設定した時間以下の場合には処理を終了し、時間カウンタの時間が設定した時間を超過した場合には時間カウンタをクリアし、自動切換えフラグFAを1にし、移動方向は並行方向か否かを判断し、並行方向の場合には移動方向を垂直方向に切換え、並行方向でない,つまり,垂直方向の場合には並行方向に切換え、処理を終了する(SA06〜SA11)。
(もっと読む)
動作プログラムの自動生成プログラムおよび装置
【課題】カメラ等の画像データ入力装置を作業ヘッド近傍に備えることなく、簡易に且つ正確に動作プログラムを作成することができる自動生成プログラムおよび装置の提供。
【解決手段】作業ヘッドを作業対象物に対して相対移動させて所望の作業を行わせるための動作プログラムを自動生成するプログラムであって、作業対象物または領域の形状データを入力可能とする基準データ入力画面を表示する第1のステップと、作業対象物または領域の画像データを読み込む第2のステップと、前記読み込んだ画像データの歪みを補正する第3のステップと、前記補正された画像データを背景として移動経路を指定可能とする移動経路入力画面を表示する第4のステップと、前記入力画面で指定された移動経路に基づき動作プログラムを自動生成する第5のステップと、を有することを特徴とする自動生成プログラムおよびそれに関する装置。
(もっと読む)
ロボットシステム
【課題】動作プログラム内の命令を動作プログラムの変更履歴データを用いて修正する場合、従来はプログラム全体の全ての履歴を時系列に検索していくことになり、所望の変更履歴データを得るまでに多くの時間を要するという課題があった。
【解決手段】表示中の動作プログラムで命令を選択し、選択している命令に関する変更履歴を抽出して表示し、抽出された履歴情報のなかから所望の履歴情報を選択することで、選択している命令の内容を、所望の履歴情報に変更することにより、動作プログラムの変更に掛かる時間を少なくすることができる。
(もっと読む)
指接触により動作教示可能となる動作教示装置
【課題】 使用者に負担をかけることなく効率的に教示作業を行うことができる動作教示装置の提供
【解決手段】 静電容量スイッチ111は、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然に位置する場所に配置されている。よって、使用者は把持部110を把持するだけで、ティーチング装置100を動作教示可能状態とすることができる。つまり、ティーチング装置100を動作教示可能状態とするにあたり使用者に特別な操作を要求しないので、動作教示にあたり使用者の操作負担を軽減することができる。圧力スイッチ113は、静電容量スイッチ111の近傍、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然と位置する場所に配置される。これにより、使用者は、通常のイネーブルスイッチと同様に、把持部110を強く握る動作をするだけで、動作入力不可能状態とすることができる。
(もっと読む)
ロボット制御装置
【課題】ユーザ座標系を作業領域に応じて自動的に選択する場合、光電センサ等の導入が必要である。またはユーザ座標系の設定に加えて作業領域の複雑な設定が必要である。
【解決手段】アーム先端に取り付けられたツールを操作手段からの操作信号によりジョグ送りする際に、ツールが予め定められた作業領域に侵入したことを検知して、所定の軸方向を有するユーザ座標系を自動的に選択するロボット制御装置である。このロボット制御装置に作業領域自動設定手段を備える。すなわち、ユーザ座標系の原点Orを含んだ所定形状を有する領域を作業領域Qとして自動設定する。所定形状とは、原点Orを中心位置とした予め定めた半径長さDrを有する球体である(c)。または、予め定めた辺長さDx〜Dzを有する直方体である(b)。作業領域Qの中心位置となるユーザ座標系の原点は、シフトできるとさらに良い。
(もっと読む)
座標系校正方法及びロボットシステム
【課題】ロボットの手先座標系と視覚センサのセンサ座標系の相対的な関係を記述する関連情報としてパラメータを容易に校正できる座標系校正方法を提供すること。
【解決手段】ロボット30のロボット座標系35に一つのマーク10を配置し、視覚センサ20を取り付けたロボット30の手先を移動させて、視覚センサ20の姿勢を変えずに平行移動させた少なくとも第1から第3の3箇所の観測箇所と、マーク10に対して第1から第3の3箇所の観測方向と異なる方向でかつ相互に異なる方向からマーク10を臨む少なくとも第4及び第5の観測箇所で、マーク10の観測を行い、各観測箇所の画像を画像処理してマーク位置認識データを得て、各観測箇所でのロボット30の姿勢データとマーク位置認識データとを対応づけて取得し、両データに基づいて関連情報を校正する。
(もっと読む)
ロボット制御装置
【課題】
手動操作座標系を自動的に切り換えても、手動操作座標系が切り換わったことを作業者が本当に認識しない限り、意図しない方向へロボットを手動操作により移動させてしまう可能性がある。
【解決手段】
ロボット制御装置RCは、複数のユーザ座標系を表示装置30に表示させることにより、表示された複数のユーザ座標系の中からいずれか1のユーザ座標系の選択を促すCPUを備える。CPUは、自動選択された座標系をティーチペンダントTPの表示装置30に表示するようにする。さらに、手動により選択された座標系と、自動選択された座標系とが一致した場合のみ、手動操作座標系の切り替え制御を行う。自動選択された座標系と作業者が意図している座標系とが相違することがなく、安全性を高めることができる。
(もっと読む)
工作機械の振動抑制装置
【課題】再加工の際にもびびり振動を発生させずに加工を行えるようにする。
【解決手段】加工中にびびり振動が発生し、回転速度の変更によってびびり振動の発生が抑制された場合(S1〜S8)、演算装置は、S9で変更の前後の回転速度を対にして記憶装置に記憶する。そして、新たな加工を行う場合、S1で回転速度を入力すると、NC装置は、S2で、入力された回転速度が記憶装置にあるか否か、すなわち記憶されている対の回転速度のうち、変更前の回転速度と同じか否かを判別する。ここで、入力された回転速度が前回の変更前の回転速度と同じ場合、S11で、これと対になっている変更後の回転速度で主軸を回転させる。
(もっと読む)
工具先端点位置を制御する多軸加工機用数値制御装置
【課題】工具先端点制御または3次元手動送りを、直線軸3軸と回転軸3軸からなる加工機で可能にする。
【解決手段】指令プログラム10を解析手段11で解析し補間手段12で補間する。自動運転における手動移動指令の重畳の場合、手動移動指令が、直線軸手動積算手段24によって直線軸手動積算量25に積算され直線軸手動積算量加算手段22によって工具先端点位置20に加算される。あるいは回転軸手動積算手段26によって第1回転軸手動積算量,第2回転軸手動積算量,第3回転軸手動積算量27に積算され、回転軸手動積算量加算手段23によって第1回転軸位置,第2回転軸位置,第3回転軸位置にそれぞれ加算される。そして、自動運転制御点位置演算手段16で実際の工具の先端点位置がプログラムで指令された工具先端点位置となる直線軸3軸と回転軸3軸の制御点を求め、各軸のサーボ30x,30y,30z,30A,30B,30Cを駆動する。
(もっと読む)
数値制御装置
【課題】工作機械においてワークの加工時における移動対象物の通常の移送とは別にその移動対象物の速度変化を伴う動作を実施する場合に、移動対象物が加工指令プログラムによって指示される加工パスからずれるのを防ぎつつ、その速度変化を伴う動作が指示されてからその動作が実行されるまでの応答性を向上する。
【解決手段】数値制御装置2では、演算部12は、特別指令入力装置122に特別指令が入力されたことに応じて、設定単位時間の長さをその特別指令の入力直前の状態における長さからその特別指令が指示する移動対象物の速度変化に応じた長さに変化させ、その変化させた後の設定単位時間当たりの各支持体102b,106a,108a,110aの対応する移動軸方向への移動量を加工パスから算出する。
(もっと読む)
アークセンサにおける狙い位置修正方法及びロボット制御システム
【課題】
狙い位置を手動により調整する機能を複数パスの連続溶接に適用することができるアークセンサにおける狙い位置修正方法及びロボット制御システムを提供する。
【解決手段】
先に行われる教示パスにおいて、ティーチペンダント40又は手動狙い調整器70により狙い位置の調整が行われた場合、その調整結果を後の教示パスで利用するか否かをティーチペンダント40により設定する。調整結果を利用すると設定された場合、後に行われる教示パスではCPU22は調整結果に基づいて内部オフセット値を更新すると印加電圧及び更新後の内部オフセット値に基づいてマニピュレータ10を移動制御する。調整結果を利用しないと設定された場合、後に行われる教示パスではCPU22はアークセンサユニット50が検出した印加電圧に基づいて、マニピュレータ10を移動制御する。
(もっと読む)
数値制御装置及び工作機械
【課題】機械構造の異なる各種工作機械における誤差補正システムの共通化を促進しつつ、互いに平行な移動軸を持つ複数の移動装置を含む工作機械でもその平行な移動軸を持つ各移動装置の動作の誤差補正を行えるようにすることである。
【解決手段】数値制御装置16は、数値制御プログラムからその数値制御プログラムが指示する対象物の移動位置である指令位置を読み取る指令位置読取り部26と、指令位置読取り部26によって読み取られた指令位置から機械軸毎の座標を算出する機械軸座標算出部28と、機械軸座標算出部28によって算出された機械軸毎の座標を誤差データ格納部22に格納された機械軸毎の誤差データに基づいて補正することにより機械軸毎の補正座標を算出する補正演算部30と、補正演算部30により算出された機械軸毎の補正座標に従って各駆動装置2c,6b,8b,10bに前記支持体を駆動させる駆動制御部32とを備えている。
(もっと読む)
工作機械の制御装置および運転制御方法
【課題】手動パルスモードと1ブロック停止モードとの両方を選択してNC装置を運転する場合に、NCプログラムの動作がブロック終了位置で自動停止した後における運転再開のための操作性を向上させる。
【解決手段】CNC部50のNCプログラムがブロック終了位置で停止した後、手動パルス発生器20のハンドル14の回転停止および当該回転停止後の回転開始をPLC部40において検出したときに、NCプログラムの次のブロックの実行を開始するように制御することにより、NCプログラムがブロック終了位置で自動的に停止した後も、ハンドル14を回転させるという1つの操作を行うだけで、NCプログラムの動作を再開させることができるようにする。
(もっと読む)
工作機械の制御装置
【課題】象限突起補正等に関するNCパラメータの調整を容易に行うことができる工作機械の制御装置を提供する。
【解決手段】複数のNCパラメータの調整レベルをそれぞれスライド式又はロータリ式の調整手段3で変えることができる入力部と、NCパラメータを変更することによって変化する機械の状態を図形で表した図形データを記憶するとともに、入力部で入力したNCパラメータの調整レベルに対応した図形データを生成する図形データ生成部7と、生成された図形データに基づいて図形を画面に表示する表示部4と、を具備する。
(もっと読む)
産業機器、および工作機械
【課題】手動パルス発生器を用いて回転体の回転方向および回転速度を容易に設定、動作可能な工作機械を提供する。
【解決手段】工作機械1の制御装置800は、手動パルス発生器の回転ハンドルの回転によって生じたパルス信号に基づき、回転ハンドルの回転量、回転速度、および回転方向を判断する第1判断部850と、手動パルス発生器を有する操作器の軸選択信号発生部が発生した信号に基づき、軸選択スイッチによる軸の選択によって位置制御および回転速度制御のうちのいずれが選択されたかを判断する第2判断部860とを含む。制御装置800は、位置制御が選択されたと判断した場合、回転ハンドルの回転量と回転方向とに基づき、主軸の移動量と移動方向とを制御する。また、制御装置800は、回転速度制御が選択されたと判断した場合、回転ハンドルの回転速度と回転方向とに基づき、テーブルの回転速度と回転方向とを制御する。
(もっと読む)
N個のロボットを同時に制御するロボット制御装置
【課題】ロボットを容易に追加および削除できると共に低コストで小型にする。
【解決手段】N個(N≧2)のロボット(R1〜Rn)を同時に制御するロボット制御装置は、メイン制御ユニット(MCU)を具備し、メイン制御ユニットは、N個のロボットのそれぞれの動作指令を作成するメインプロセッサ(MP)と、メインプロセッサにより作成された動作指令に基づいてロボットのそれぞれを駆動するサーボモータの動作量を算出するサーボプロセッサ(SP)と、を含んでおり、さらに、メイン制御ユニットに接続された、N個のアンプユニット(AU1〜AUn)を具備し、サーボプロセッサにより算出されたサーボモータの動作量に基づいてN個のロボットのうちの1個のロボットのサーボモータを駆動するサーボアンプ(SA1〜SAn)、を含む。
(もっと読む)
数値制御装置
【課題】時刻を記録したり作業内容を記録する必要がなく、機械の稼働状況、特に機械の送り軸そのものの稼働状況を各軸の総移動量を記憶することで、機械の送り駆動機構の劣化を予知するためのデータを得ることができる数値制御装置を提供する。
【解決手段】与えられた指令に基づいて分配処理により各軸の1サンプリング周期間毎の移動量を出力する分配部25と、分配部25からの各軸の1サンプリング周期間毎の移動量を積算して各軸の総移動量を得るデータ処理部30と、各軸の1サンプリング周期間毎の移動量を積算して各軸の制御周期間毎の目標位置を各軸サーボに与えて各軸のモータを駆動するサーボ処理部21と、データ処理部で得られる各軸の総移動量を記憶するメモリ22とを備える。
(もっと読む)
ワーク情報表示装置
【課題】パレット上の指示されたワークのワーク情報を表示するワーク情報表示装置を提供する。
【解決手段】ワーク配置領域5内に配置された各ワークW1〜W3を個別に指示自在のワーク指示手段29と、前記ワーク指示手段29の指示位置を変更操作自在な指示位置操作手段47と、上記指示位置操作手段47によって指示された前記ワーク配置領域5内の指示位置を演算する指示位置演算手段51と、この指示位置演算手段51によって演算された指示位置に該当するワークを記憶手段21から検索するワーク検索手段53と、上記ワーク検索手段53によって検索されたワークの形状寸法に基づいてデータベース23から該当するワーク情報を検索する第1検索手段25と、この第1検索手段25によって検索されたワーク情報を表示する表示手段17と、を備えている。
(もっと読む)
工作機械の数値制御装置
【課題】手動で所望の送り機構を操作して工具を移動させたときに、手動操作した送り機構の加工位置を確実に画面表示できる工作機械の数値制御装置を提供すること。
【解決手段】作業者が手動パルス発生器の送り機構選択スイッチにより送り機構を選択すると、現在位置表示検出手段により、現在情報記憶領域が記憶している送り機構の種別情報に作業者が選択した送り機構の選択情報が含まれているか否か判断する(ステップS40)。作業者が選択した送り機構が含まれていない場合、送り機構の加工位置の座標をディスプレイに表示するとともに送り機構の選択情報及びディスプレイの表示データを現在情報記憶領域に記憶する(ステップS45)。
(もっと読む)
1 - 20 / 37
[ Back to top ]