
Fターム[3C269QC06]の内容
Fターム[3C269QC06]の下位に属するFターム
紙テープ
Fターム[3C269QC06]に分類される特許
1 - 20 / 53
産業用ロボット
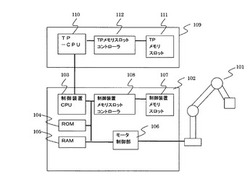
【課題】アラーム発生時にどのデータを記録するかは予め設定されており、運転稼動中に運転を停止させることなく、どのデータを記録するのか設定することができない。
【解決手段】ロボットと、前記ロボットを制御するロボット制御装置と、前記ロボットを操作するティーチペンダントとを備えた産業用ロボットであって、前記ロボット制御装置および/または前記ティーチペンダントは記録メディアスロットを有し、前記記録メディアスロットに接続された記録メディア内に記憶されており前記産業用ロボットの動作中に記憶する情報を定義した記録方法ファイルを前記記録メディアの接続時に自動的に読み出し、前記記録方法ファイルを構成しており情報を記録するトリガとなる記録トリガの監視や記録した情報の書き出しを含む処理を行う解析用機能の実行を自動的に開始する。
(もっと読む)
ロボット教示方法、ロボット教示装置およびプログラム

【課題】ロボットが実行する作業に関する情報を簡便に教示できるロボット教示方法を提供する。
【解決手段】ロボット教示方法は、ワーク10に対して行なう作業に関わる動作をロボット1へ教示するための方法であって、ロボット1に備えられたカメラ6によって、マーカー15を有するワーク10の撮像を取得する撮影ステップ(ステップS2)と、当該撮像からマーカー15を検出する検出ステップ(ステップS3)と、マーカー15を解析して、ロボット1が動作をするための教示情報を取得する解析ステップ(ステップS4、S5)と、教示情報を記憶する記憶ステップ(ステップS6)と、を有する、ことを特徴とする。
(もっと読む)
最適環境設定システム
【課題】複数の作業者にとって最適な環境に設定する最適環境設定システムを提供する。
【解決手段】複数人の作業者が使用する加工機械2を各作業者Pにとって最適な環境に設定する最適環境設定システムであって、作業者Pの個人情報が予め記憶された個人情報記憶部と作業者Pにとって加工機械2の最適環境設定情報が予め記憶された設定個人情報記憶部とを有するカード3と、加工機械2に設けられてカード3に記憶された個人情報と最適環境設定情報とを読み取ると共に加工機械2での作業実績をカード3に書き込み可能なデータ読み取り書き込み部と、加工機械2に設けられてこのデータ読み取り書き込み部で読み取られた個人情報と最適環境設定情報とに基づいて加工機械2の環境を設定する環境設定部とを備えていることを特徴とする。
(もっと読む)
ロボット軌跡生成装置
【課題】ロボット軌跡生成装置を提供する。
【解決手段】疑似3次元空間を設定し、読み込んだ2次元データをこの3次元空間での特定の面に貼り付ける。この結果、3次元データが生成され、この3次元データに基づいてロボットのツール軌跡を生成する。2次元データが複数の面に跨る場合も、一筆書きでのロボットのツール軌跡を生成する。
(もっと読む)
製造システム、製造方法、およびプログラム
【課題】簡単に、付加物が付加された対象物の形状を成形でき、特に、対象物を計測してから、より迅速に成形する。
【解決手段】スキャナ11は、人の顔16の表面の各点の3次元空間上の位置を測定し、ポリゴンデータを出力する。コンピュータ14は、ポリゴンデータを、顔16の形状を示すサーフェースデータに変換し、兜の形状を示すサーフェースデータと、顔16の形状を示すサーフェースデータとを合成する。マシニングセンタ15は、兜の形状が予め成形されているブランクに、合成されたデータで示される形状によって人の顔16の形状を成形する。本発明は、製造システムに適用できる。
(もっと読む)
位置決め装置のキャリブレーション方法、位置決め装置、およびこれらのためのコンピュータプログラム
【課題】従来の位置決め装置のキャリブレーション精度が不十分で、位置決め時間が長く精度も不十分な問題点を解決するキャリブレーション方法を提供する。
【解決手段】カメラ座標系とテーブル基準座標系の位置・姿勢関係(Ak)をAkの誤差を補正するために導入した誤差補正座標系とテーブル基準座標系の位置・姿勢関係とみなし、カメラ座標系上の基準点の任意に決めた現在位置と目標位置における位置ベクトルAkを用いてテーブル基準座標系上の位置ベクトルに変換し、変換された位置ベクトルの諸元を用いて基準点の現在位置から目標位置へのテーブルの移動量を計算し、移動後に現在位置にあった基準点の位置ベクトルの諸元を計測し、Akの誤差補正に係るデータを取得することによって、カメラ座標系と誤差補正座標系の位置・姿勢関係(Bk)を取得し、AkとBkによってカメラ座標系とテーブル基準座標系の新たな位置・姿勢関係(Ck)を取得する。
(もっと読む)
切削シミュレーション処理における位置決定装置またはその方法
【課題】 切削量ゼロで被切削物表面を移動させる場合に、ネバリ感を排除する。
【解決手段】 切削量演算手段8は前記仮想回転切削工具切削能力データおよびユーザから与えられる前記仮想回転切削工具の単位時間当たりの回転数に基づいて、前記仮想回転切削工具による単位時間あたりの切削量である単位時間切削量を演算する。位置決定手段10は、被切削対象物に対して、前記仮想回転切削工具の点群データとボクセルデータの衝突数を前記被切削係数で換算した換算衝突量が、前記単位時間切削量と合致する位置を二分探索法にて探索し、前記仮想回転切削工具の位置を決定する。その際、前記仮想回転切削工具の進行方向とは逆側の境界点を所定距離だけ、法線方向に戻して二分探索における中点を演算する。
(もっと読む)
数値制御方法及びその装置
【課題】 大容量加工プログラムの運転であっても、ジャンプ先位置情報、各プログラムの先頭位置などをメモリに記憶させるためのサーチ時間を意識する必要のない数値制御方法及びその装置を提供する。
【解決手段】 一つのファイルにまとめられた複数系統の加工プログラム4の各先頭位置をサーチするものにおいて、ファイルオープン操作時に初回ファイルオープンか否かを判断し、初回ファイルオープンと判断された時、複数の多系統加工プログラム4の各先頭位置をサーチし、このサーチした各先頭位置を、数値制御装置の不揮発性メモリ8に記憶させる。
(もっと読む)
表示装置、表示制御方法、プログラム、およびコンピュータ読み取り可能な記録媒体
【課題】制御プログラムが単純順次実行型であるか状況適応型であるかを問わず、プログラム制御される制御対象装置の特定部位の軌跡を表示可能な表示装置を提供する。
【解決手段】PC10は、制御プログラムの実行結果である一連の位置の指令値を取得する指令値取得部1131と、取得された位置の指令値に対応する、制御周期毎または複数の指定された制御周期における一連の特定部位の位置を求める位置演算部1132と、一連の特定部位の位置の各々を時間の経過順に通る軌跡を示した軌跡データを作成する軌跡データ作成部1133と、軌跡の空間的形態を画像として画面に表示するための画像データを軌跡データを用いて作成する画像データ作成部1134と、画像データを用いて画像を画面に表示させる表示制御部1011とを備える。
(もっと読む)
NC装置
【課題】メモリの故障を診断することによるシステムパフォーマンスの低下を最小限に抑えつつ、システムとしての安全性を確保することを可能とするNC装置を得ること。
【解決手段】同一容量を有する2つのメモリ部3,4と、メモリ部3,4に対するライト/リードによる故障診断を実行する故障診断部、2つのメモリ部3,4の一方を故障診断対象とし、他方をCPUからのアクセス対象とするメモリの選択切替え制御を、1つのメモリの全領域に対する故障診断が終了する度に実行する切替え制御部、一方のメモリの故障診断が終了すると、他方のメモリの記憶データを一方のメモリに転送するデータ転送部を有するテスト回路2とを備える。
(もっと読む)
工作機械
【課題】不正移設を検知し、不正移設後の工作機械の起動を禁止する。
【解決手段】工作機械の本体フレームの底部の溝部2c内に、フォークリフトのフォークからの外力で残留応力が残る銅板製の被測定部材28を設け、被測定部材28の一端に加振器29を他端に振動検出器30を設置し、工作機械の設置後の初期に加振器29と振動検出器30を介して振動を付加して振動データを取得し、基準波形パターンである第1振動特性を演算し記憶しておく。工作機械の電源投入時に、前記同様に今回の振動データを取得し、今回の波形パターンである第2振動特性を演算し記憶しておく。工作機械の移設がない場合には、第1,第2振動特性が一致するが、フォークリフトによる搬送を介して工作機械を移設した場合、被測定部材28の内部に残留応力が残るため、第1,第2振動特性が一致しなくなるため、その場合は工作機械の起動を禁止する。
(もっと読む)
数値制御プログラムのコマンド表示装置及びコマンド表示プログラム
【課題】工作機械のための数値制御プログラムに記述されたペアコマンドの相対関係を容易に確認することを課題とする。
【解決手段】対で使用されるペアコマンドA2を一組以上含む複数のコマンドA1の中から選ばれるコマンドA1で記述され記憶部(数値制御プログラム保存領域31)に記憶されている数値制御プログラムP1に記述されたペアコマンドA2を抽出し、前記ペアコマンドA2の組PA1毎に前記抽出されたペアコマンドA2を分けて前記数値制御プログラムP1に記載された順に並べて表示する。
(もっと読む)
ロボットの動作診断方法、ロボットの制御装置、ミニエンバイロメントシステムの制御装置、ロボット、及びミニエンバイロメントシステム
【課題】ロボット動作を診断して不具合を回避することができ、かつ、異常部位の詳細表示やパネル上でのロボット動作の再現により、メンテナンス時間を短縮できるロボットの動作診断方法を提供する。
【解決手段】複数の駆動軸をそれぞれ駆動する複数のモーター、マニピュレータ、及びセンサを有し、駆動軸によりマニピュレータを移動させるロボットの動作診断方法において、少なくとも1つの駆動軸に対し、ロボットの診断対象とする動作パターンを設定し、ロボットの初期状態での動作パターンにおいて、複数回計測したモーターを制御する制御装置の複数の入出力信号と、センサまたはマニピュレータを制御する機器の複数の入出力信号とを判定データとし、新たに計測した判定データを診断データとし、統計的パターン認識方法により診断データが判定データに含まれるかを判別することにより、新たに計測した時のロボットの動作が正常であるか判定する。
(もっと読む)
ロボット制御システム、ロボット制御方法
【課題】高速かつ遅延の少ないデータ送受信をPCと動作制御装置との間で行うことができるロボット制御システムおよびロボット制御方法を提供することを課題としている。
【解決手段】ロボット制御システム1は、動作制御装置2と動作指示装置3を備え、動作制御装置2は、通信部201と、プロキシ部202と、プログラム記憶部203と、コントローラー統括部204と、プログラム実行部205と、ロボット制御部206とを備え、ロボット4が接続されている。動作指示装置3は、通信部301と、プロキシ部302と、データ読出・書込部303と、データ記憶部304と、プログラム部305と、入出力部306とを備え、画像表示装置5と入力装置6が接続されている。また、動作制御装置2と動作指示装置3は、LAN等のネットワークやUSB I/Fを介して接続している。
(もっと読む)
ロボットのオフライン教示方法
【課題】ティーチングデータの作成を容易とするロボットのオフライン教示方法を提供する。
【解決手段】ロボットのオフライン教示方法は、複数の仮想教示点を設定するステップ(STEP2)、始点と終点とを含む一部の仮想教示点において仮想ツールの姿勢を設定するステップ(STEP3〜7)、一部の仮想教示点間の補間動作を実行するステップ(STEP8)、補間動作実行時の仮想ツールの位置及び姿勢を所定間隔毎に補間動作点として記憶するステップ(STEP9)、他の仮想教示点毎に、記憶された補間動作点のうち所定の選択基準を満たす補間動作点を選択するステップ(STEP11,12)、他の仮想教示点毎に、選択された補間動作点の姿勢データを読込み、読み込んだ姿勢データを他の仮想教示点の姿勢データとして記憶させるステップ(STEP13〜16)を有する。
(もっと読む)
データ処理装置及び制御方法及びプログラム
【課題】周期時間内にデータ処理を確実に完了させることとデータ処理結果の精度の向上を図ることを同時に達成する。
【解決手段】メインCPU200に、確実に周期時間内にデータ処理が完了するが、データ処理の精度は制御アルゴリズムBよりも劣る制御アルゴリズムAを割り当て、サブCPU300に、周期時間内にデータ処理が完了する保証はないが、データ処理の精度は制御アルゴリズムAよりも高い制御アルゴリズムBを割り当て、メインCPU200とサブCPU300が同時に制御アルゴリズムAと制御アルゴリズムBによりデータ処理を行い、周期時間内に完了したデータ処理結果のうち、精度が高いデータ処理結果を採用する。
(もっと読む)
ロボット教示システム
【課題】ロボットの教示作業に必要な時間を短縮することが可能なロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ツール13と、制御部20とを備えている。制御部20は、加工対象Wの図面データ25を読み込む図面データ読込部21と、図面データ25を表示する表示部29と、表示部29上で参照マーク35を移動させる入力部22とを有している。特定領域設定部43は目標図形50に対して特定領域51を設定するとともに、通過位置設定部24は、図面データ25上の特定領域51に参照マーク35を一致させた場合に、当該特定領域51に対応する一の通過位置を定める。プログラム作成部31は、移動プログラム32を作成し、出力部33は、移動プログラム32をロボットコントローラ12に送信する。
(もっと読む)
作業装置及びその校正方法
【課題】作業装置が有する作業部と距離測定部との校正用パラメータを、非接触かつ自動的に取得する。
【解決手段】作業部を作業位置へ移動させる移動部と、移動部に設置されて作業部とともに移動する距離情報取得部と、移動部とは独立して固定された撮像装置とを有する作業装置は、撮像装置における画像平面上に仮想目標点を設定し、撮像装置によって撮影された画像において作業部の作業基準点と仮想目標点とを一致させるための移動部の座標を複数取得する。また、作業装置は、画像において、距離情報取得部の投光位置と仮想目標点を一致させる移動部の座標と、その座標位置において距離情報取得部から得られる距離情報とを複数取得する。そして、作業装置は、上記処理で取得された複数の座標及び距離情報に基づいて、移動部と距離情報取得部のための校正用パラメータを算出する。
(もっと読む)
工作機械用制御装置および工作機械用制御方法
【課題】異常部位の表示を行うための登録作業について従来よりも時間と労力を軽減できる工作機械用制御装置および工作機械用制御方法を提供する。
【解決手段】工作機械用制御装置10は、工作機械制御手段13(制御手段)と、シミュレート手段14と、モデル表示手段15と、識別手段16と、強調表示手段17と、異常情報表示手段18とを備える。さらに、異常部位と視点との間に干渉物が存在するか否かを判断する干渉物判断手段19と、干渉物があると判断された場合には干渉率が最小となる視点を捜索する視点捜索手段20と、捜索された視点に位置を変更する視点変更手段21と、変更された視点について干渉率が許容値を超える場合には当該干渉率が許容値以下となるように干渉物の表示形態を変更して表示し干渉率が許容値以下の場合には干渉物をそのまま表示する干渉物表示変更手段22とを有する。
(もっと読む)
部品プログラムの作成のための方法
【課題】工作機械のための部品プログラムの簡単な作成を可能にする。
【解決手段】部品プログラム21が制御命令を有し、制御命令に基づいて制御装置9によって工具16の運動が制御可能であり、工具の運動および加工工程に関する情報を含む運動情報22が読み込まれる部品プログラム21の作成方法に関する。制御装置9において特定の実行すべき加工工程のために制御サブプログラム11a,11bを指定する使用可能性情報23が読み込まれ、使用可能な制御サブプログラム11a,11bおよび運動情報22に基づいて、実行すべき加工工程のために当該加工工程に付属する制御サブプログラム11a,11bが使用可能である場合に、当該加工工程に付属する制御サブプログラム11a,11bの呼出しのための制御サブプログラム呼出し要求が制御命令として発生させられる。
(もっと読む)
1 - 20 / 53
[ Back to top ]