
Fターム[3D232DA27]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | 横方向変位 (67)
Fターム[3D232DA27]に分類される特許
1 - 20 / 67
道路形状推定装置及びプログラム
運転集中度基盤の車線維持制御装置およびその方法
追従制御装置
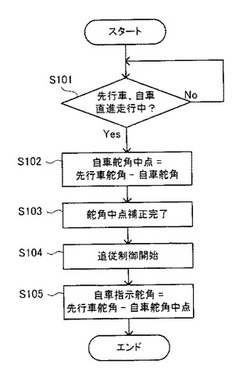
【課題】自車両を先行車に適切に追従させる。
【解決手段】追従制御装置(100)は、通信により取得された先行車(20)に係る舵角情報に基づいて、自車両(10)を先行車に追従させる制御である追従制御を実施可能な追従制御装置である。該追従制御装置は、追従制御が実施されておらず、且つ、自車両の直進走行時における(i)先行車に係る舵角情報及び(ii)自車両に係る舵角を、夫々取得する取得手段(15)と、取得された先行車に係る舵角情報と取得された自車両に係る舵角との差分を算出し、該算出された差分を自車両の舵角中点として設定する設定手段(15)と、を備える。
(もっと読む)
インホイールシステムを利用した車線維持補助システム

【課題】 インホイールシステムを利用した車線維持補助システムを提供する。
【解決手段】 車両走行中の車線離脱危険度を判断する段階、車線維持補助のための必要ヨーレートを演算する段階、前記演算された必要ヨーレートと実際ヨーレートとの差による要求ヨーレートを算出する段階、前記要求ヨーレートを実現するためのトルクベクタリング駆動力配分量を演算する段階を含むインホイールシステムを利用した車線維持補助システムであり、車線離脱の危険がある場合、操向トルクを用いないので運転手に違和感を与えず、後輪駆動力の変化を利用することによって違和感を最小にすることを特徴とする。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバの視線と走行路との交点に到達するまでの時間が小さい状況における車両軌跡追従特性のダンピンの悪化を改善し、軌跡追従特性に優れた車両運動を実現する。
【解決手段】注視時間算出部30で、内向きカメラ12で撮像されたドライバの顔画像、外向きカメラ14で撮像された車両前方画像、及び車速センサ16で検出された車速Vに基づいて、注視時間Tを算出し、注視時間判定部32で、注視時間Tが予め定めた閾値Tthより小さいか否かを判定し、T<Tthの場合には、ダンピング変更部36で、ヨー角検出部34で検出された自車両のヨー角θと目標軌跡のヨー角θdとの差と、予め定めたダンピング特性とフィードバックゲインkp1との関係を示すテーブルに基づいて取得された必要なダンピング特性を得るためのkp1との積で表される偏差フィードバックδf_addを算出し、前輪舵角装置20へ出力する。
(もっと読む)
車両、自動駐車支援設備および自動駐車システム
【課題】天候や時間帯に関わらず車両を駐車スペースに精度よく誘導する。
【解決手段】車両の制御装置180は、駐車スペースに車両を自動駐車させる自動駐車制御を実行する自動駐車制御部181を含む。駐車スペースの周囲には、入口側が開口され、入口側から奥に向かって左右の間隔が狭くなるように配置されるガイド棒が設けられる。自動駐車制御部181は、当接判定部181Bと、ステアリング制御部181Cとを含む。当接判定部181Bは、自動駐車制御の実行中、タイヤ空気圧情報に基づいて各タイヤがガイド棒に当接したか否かを判定する。ステアリング制御部181Cは、当接判定部181Bによっていずれかのタイヤがガイド棒へ当接したと判定された場合、そのタイヤとガイド棒との当接を回避するように、ステアリングの自動制御を行なう。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力及び回避軌道を導出する。
【解決手段】所望の位置、該位置での速度の方向、及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、自車両と所望の位置との距離のx成分Xe、距離のy成分Ye、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力を求めるために導入した第1の導入パラメータη1の特定仮定下での値η1’との関係、第2の導入パラメータη2の特定仮定下での値η2’との関係、第3の導入パラメータη3の特定仮定下での値η3’との関係を定めた低速化3次元マップを用いて、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力を導出する。
(もっと読む)
車両の操舵制御装置
【課題】荷物の積載状態に拘わらず、安定した制御性能を得ることが可能な車両の操舵制御装置の提供。
【解決手段】車両質量演算部41は、変位センサ36が検出した相対変位HFL,HFR,HRL,HRRを用いて車両の質量を算出する。ヨー慣性モーメント演算部43は、車両質量演算部41が算出した車両の質量からヨー慣性モーメントを算出する。状態フィードバックゲイン演算部44は、車両質量演算部41が算出した車両の質量と、ヨー慣性モーメント演算部43が算出したヨー慣性モーメントIとを用いて、目標操舵角を入力量とする操舵系の状態方程式を設定し、設定した状態方程式に対する評価関数を設定し、設定評価関数を最小とする状態フィードバックゲインを、LQ制御側に従って算出する。目標操舵角演算部45は、算出された状態フィードバックゲインKを用いて、車両を目標進路に従って走行させるための目標操舵角を算出する。
(もっと読む)
車線逸脱防止装置
【課題】走行車線から逸脱する傾向にある自車両を走行車線にスムースに復帰させるためのステアリング操作を的確に補助する上で有利なレーン逸脱防止装置を提供する。
【解決手段】車線逸脱判定手段38Aは自車両が走行車線から逸脱する傾向にあるか否かを判定する。修正用走行軌跡算出手段38Cは自車両が走行車線から逸脱する傾向にあると判定された場合に、自車両が走行車線の中心線に戻るために自車両が走行すべき軌跡である修正用走行軌跡を算出する。理想操舵トルク算出手段22Bは、ステアリング1402が前記の修正用走行軌跡に沿って自車両が走行するように操作された場合に操舵機構1406で発生する操舵トルクを理想操舵トルクとして算出する。第2の操舵補助トルク決定手段22Cは、ステアリング1402が操作された場合に操舵機構1406で発生する操舵トルクが理想操舵トルクに合致するように操舵補助トルクを決定する。
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、迅速な進路変更を可能とすると共に、進路変更後の車両安定性を好適に確保する。
【解決手段】
緊急操舵取得手段(MKQ)が、緊急操舵であることを取得した場合において、制御手段(CTL)は、前輪制動トルク、及び、後輪制動トルクを増加する。緊急操舵が取得された場合(Kqs=1)、前輪制動トルクに対する前記後輪トルクの比率である前後比率(Hzs)を、緊急操舵が取得されない場合(Kqs=0)の前後比率(Cno,Ko)に比較して小さい特性(Ckq,Kp)をもって前輪制動トルク、及び、後輪制動トルクを増加する。さらに、制御手段(CTL)は、後輪制動トルクの時間変化量(Kr)が、前輪制動トルクの時間変化量(Kf)よりも小さくなるように調整する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて所望の縦移動距離に対する横移動距離を最大にする軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値及び所望の縦移動距離Xeを設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、縦移動距離Xe、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、横移動距離Yeを最大にする軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、所望の縦移動距離に対して横移動距離が最大となる軌道及び車体合成力を導出する。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時等に運転者が車両挙動に違和感を覚えることを抑制すべく、それぞれの輪荷重に応じて左右後輪の目標舵角を補正する後輪操舵制御装置を提供する。
【解決手段】 左右後輪3rl,3rrの輪荷重変動量のどちらか一方が判定閾値を超え、ステップS6の判定がYesになった場合、操舵ECU7は、ステップS7で、左右後輪3rl,3rrのうち輪荷重変動量が判定閾値を超えた方の悪路走行時目標舵角に対し、輪荷重変動量の値に応じた補正係数(0、あるいは、1より小さな値)を乗じた後、ステップS4に移行して補正後の悪路走行時目標舵角が得られるように左右後輪操舵アクチュエータ17l,17rを駆動する。
(もっと読む)
車両の制御装置
【課題】レーンキープ制御とドライバの操舵意思を反映した操舵制御との干渉を制御品質を低下させることなく防止する。
【解決手段】本発明に係る車両の制御装置は、転舵輪に対し該転舵輪の舵角の変化を促す操舵力を付与可能な操舵力付与手段を備えた車両において、維持すべき目標走行路と車両との相対的位置関係を規定する位置状態偏差を検出する偏差検出手段と、検出された位置状態偏差に基づいて操舵力付与手段の制御量を決定する決定手段と、決定された制御量に従って操舵力付与手段を制御することにより車両の走行路を目標走行路に維持する制御手段と、ドライバの操舵入力を検出する操舵入力検出手段と、走行路が目標走行路に維持される期間において操舵入力が検出された場合に、この操舵入力が反映されるように操舵力付与手段の制御量の決定基準を補正する補正手段とを具備する。
(もっと読む)
群走行制御装置及び群走行制御方法
【課題】処理負荷を抑えつつ群の挙動を乱さないような干渉回避行動を行う。
【解決手段】自車両M0を囲うように設定されて他車両との干渉を少なくとも規定の進行方向変更からなる回避行動で回避可能な干渉回避エリアAR−1を有すると共に、自車両M0の周囲に位置する他車両と車車間通信をしながら群走行を行う群走行制御装置である。上記進行方向変更による回避量は、上記干渉回避エリアAR−1において、自車両M0の側方位置に比較して、自車両M0の前方位置が大きく設定する。自車両M0に対する相対距離が小さな他車両を干渉回避対象として選択する。干渉回避対象が自車両M0の干渉回避エリアAR−1のどの位置に侵入したかを検出する。検出された干渉回避対象の位置、及びその干渉回避対象が位置する干渉回避エリアAR−1内の位置に応じた進行方向変更の回避量に基づき、上記干渉回避対象に対し、自車両M0の回避動作を行わせる。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者の上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して、外乱情報を運転者に伝達する制御量を算出する。擬似車両挙動発生手段が、リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、動作制御手段を制御することによって擬似的に発生させるための制御量を算出する。協調制御手段が、情報伝達制御手段によって算出された制御量と、擬似車両挙動発生手段によって算出された制御量とに基づいて、車両を制御する。
(もっと読む)
車両の出庫モード選択表示装置
【課題】駐車モードに応じて適切な出庫モードを選択する表示装置を提供する。
【解決手段】出庫モード選択表示装置は、駐車スペースへの車両の駐車形態を示す駐車モードのそれぞれに対応して、駐車スペースからの車両の出庫形態を示す出庫モードを予め記憶する出庫モード記憶手段と、車両が駐車スペースに駐車するとき、該駐車の駐車モードを判定する駐車モード判定手段と、車両が前記駐車スペースに駐車した後、該車両の乗員からの該駐車スペースからの出庫開始指示を検出する手段と出庫開始指示に応じて、出庫モード記憶手段から、該判定された駐車モードに対応する出庫モードを選択して表示する選択表示手段と、を備える。自動操舵によって駐車された場合のみならず、手動操舵によって駐車された場合にも駐車モードを判定することができる。
(もっと読む)
車線維持支援装置及び車線維持支援方法
【課題】車線追従性とドライバ協調性とを考慮して、運転者に違和感のない車線維持制御を行うことができる車線維持支援装置を提供する。
【解決手段】運転者の操舵意思を検出していないとき、車線追従性を重視した第1の操舵角制御を行い、運転者の操舵意思を検出したとき、運転者の操舵操作が反映され易い第2の操舵角制御を行う。操舵トルクThが操舵トルク閾値T0以下で、且つ操舵角偏差Δθ(=θr−θs)が操舵角閾値Δθ0以下であるとき、運転者の操舵意思がないと判断して、第2の操舵角制御から第1の操舵角制御へ移行する。
(もっと読む)
車線維持支援装置及び車線維持支援方法
【課題】運転者の意図する走行ラインとのずれからくる違和感を低減しつつ、走行車線逸脱を有効に防止することが可能な車線維持支援装置を提供する。
【解決手段】自車両が走行する走行車線Lの幅方向中央からそれぞれ幅方向左右に横変位基準位置LXL、LXRを設ける。そして、少なくとも左右の横変位基準位置LXL、LXR以内に自車両が位置する場合、ヨー角偏差が小さくなるように自車両をフィードバック制御する。また、走行車線中央に対し左右の横変位基準位置LXL、LXRよりも外に自車両がいる場合、上記角度偏差および横変位偏差が小さくなるようにフィードバック制御する。角度偏差及び横方向偏差の少なくとも一方の偏差に応じて、相対的に前輪の転舵方向に対する後輪の転舵方向の位相を制御する。
(もっと読む)
旋回挙動制御装置、旋回挙動制御方法
【課題】旋回性能の低下を防ぎつつ旋回挙動の安定化を図る。
【解決手段】差分E1を算出し(ステップS1)、差分E1が第一の所定値th1を超えたら(ステップS3の判定が“Yes”)、その時点の推定値γeを目標値γ*として設定する(ステップS4)。そして、差分E2を算出し(ステップS6)、この差分E2が第二の所定値th2より大きいときに(ステップS7の判定が“Yes”)、差分E2に応じて転舵角θwの修正量Δθを算出し(ステップS8)、修正量Δθに応じてカウンターステアを行う。その後、再び差分E2が第二の所定値th2より小さくなり、且つ差分E1が第一の所定値th1より小さくなったら(ステップS10の判定が“Yes”)、修正量Δθの算出及びカウンターステアを終了する。
(もっと読む)
車両用操舵制御装置及び車両用操舵制御方法
【課題】運転者に違和感を与えることなく適正に操舵反力を付与することができる車両用操舵制御装置及び車両用操舵制御方法を提供する。
【解決手段】ステアリングホイール1と舵取り機構10(転舵機構)とを機械的に切り離した構成とし、前輪(操向輪)11R,11Lの転舵角θtが、自車両の走行状態に基づいて演算した自動転舵指令角θaとなるように、転舵モータ8を駆動制御する自動転舵制御を行う。このとき、自動転舵制御により発生した自動転舵指令角θaに対応する路面反力Faを推定する。そして、検出した実路面反力Fから推定した推定路面反力Faを差し引いた反力偏差相当の操舵反力をステアリングホイール1に付与するように、反力モータ5を駆動制御する。
(もっと読む)
1 - 20 / 67
[ Back to top ]