
Fターム[3D232DA42]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | 上下方向変位(動的なもの) (24)
Fターム[3D232DA42]に分類される特許
1 - 20 / 24
ラック軸力推定方法及び電動パワーステアリング装置
【課題】ステアリングホイールの回転運動をステアリングラック軸及びこれに連結されるタイロッドの直線運動に変換し、操舵輪の転舵を行う電動パワーステアリング装置において、常に精度の良いパワーアシスト制御を行うことのできる電動パワーステアリング装置を提供する。
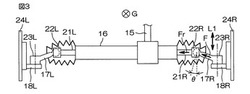
【解決手段】車両の走行状態を表す物理量に基づいてステアリングラック軸16に作用するラック軸力Fを演算により推定し、ラック軸16と前記タイロッド17Rとの、車体の進行方向に垂直な面内に投影した交差角θを求め、前記交差角θに基づいて、推定された前記ラック軸力Fを補正する。
【効果】車両の走行中、車両が左右に傾いてサスペンションストロークが発生したときにラック軸力を過大に評価することがなくなる。
(もっと読む)
操舵反力生成装置、車両及び操舵反力生成方法

【課題】基準ラック軸力をより高精度に推定すること。
【解決手段】基準ラック軸力演算部15Bの車体持ち上げエネルギ演算部15aは、操舵角に基づき、転舵されることにより発生する車体1Aの上下方向の変位による車体持ち上げエネルギを算出し、タイヤ摩擦エネルギ演算部15bは、操舵角に基づき、転舵によってそれら転舵輪と走行路面との間に発生する摩擦によるねじりトルクを算出し、セルフアライニングエネルギ演算部15cは、操舵角及び車速に基づき、セルフアライニングトルクを算出し、加算部15dは、車体持ち上げエネルギ、ねじりトルク、セルフアライニングトルクを加算して総エネルギ量を求め、ラック軸力演算部15eは総エネルギ量とラックストローク量とに基づき基準ラック軸力を推定する。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
車両の操舵制御装置
【課題】荷物の積載状態に拘わらず、安定した制御性能を得ることが可能な車両の操舵制御装置の提供。
【解決手段】車両質量演算部41は、変位センサ36が検出した相対変位HFL,HFR,HRL,HRRを用いて車両の質量を算出する。ヨー慣性モーメント演算部43は、車両質量演算部41が算出した車両の質量からヨー慣性モーメントを算出する。状態フィードバックゲイン演算部44は、車両質量演算部41が算出した車両の質量と、ヨー慣性モーメント演算部43が算出したヨー慣性モーメントIとを用いて、目標操舵角を入力量とする操舵系の状態方程式を設定し、設定した状態方程式に対する評価関数を設定し、設定評価関数を最小とする状態フィードバックゲインを、LQ制御側に従って算出する。目標操舵角演算部45は、算出された状態フィードバックゲインKを用いて、車両を目標進路に従って走行させるための目標操舵角を算出する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】曲げモーメントの検出のために別途センサを設けることなく、磁歪式トルクセンサのみでステアリングシャフトに作用する曲げ荷重を検出する。
【解決手段】ステアリングシャフト7に捻りトルクのみをかけたときの第1検出コイル及び第2検出コイルの検出値の特性曲線を、初期検出値からなる初期特性曲線として記憶部31に記憶し、ECU3内の曲げ荷重検出部32において、第1検出コイル及び第2検出コイルの検出値とこの検出値に対応する前記初期特性曲線における初期検出値との差分に基づき、ステアリングシャフト7に作用する曲げ荷重量を検出する。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時等に運転者が車両挙動に違和感を覚えることを抑制すべく、それぞれの輪荷重に応じて左右後輪の目標舵角を補正する後輪操舵制御装置を提供する。
【解決手段】 左右後輪3rl,3rrの輪荷重変動量のどちらか一方が判定閾値を超え、ステップS6の判定がYesになった場合、操舵ECU7は、ステップS7で、左右後輪3rl,3rrのうち輪荷重変動量が判定閾値を超えた方の悪路走行時目標舵角に対し、輪荷重変動量の値に応じた補正係数(0、あるいは、1より小さな値)を乗じた後、ステップS4に移行して補正後の悪路走行時目標舵角が得られるように左右後輪操舵アクチュエータ17l,17rを駆動する。
(もっと読む)
車線逸脱警報装置
【課題】車両が車線を逸脱すると予測された場合に、運転者がすぐに回避行動を取ることができる車線逸脱警報装置を提供する。
【解決手段】車両(V)の走行車線からの逸脱が予測された場合(ステップS1)、一時的に後輪トー角を前輪と逆相に制御して逸脱方向のヨーモーメントが発生させるとともに、サスペンションを制御してロール感を強調する(ステップS2〜S4)。このため、車両運転者は、強い注意を喚起されてすばやく回避動作を取ることができる。
(もっと読む)
車両挙動制御装置
【課題】高速旋回走行時など、車輪の接地荷重が増大した場合にも円滑な操舵制御を実現するための車両挙動制御装置を提供する。
【解決手段】ECU20は、ステップS2で後輪目標舵角δrrtと後輪実舵角δrrrとの差Δδrrが異常判定閾値δthを超えたか否かを判定し、この判定がYesになると、ステップS3で横Gセンサ12から入力した横加速度Gyが加速度判定閾値Gythを超えたか否か、すなわち後輪操舵アクチュエータ8rが作動遅れが右後輪3rrの接地荷重の増大によって引き起こされたか否かを判定する。ステップ3での判定がYesであった場合、ECU20は、ステップS4で接地荷重低減指令を減衰力制御部22の減衰力補正部32に出力し、後輪3rのダンパ4rの目標減衰力を低下させるように補正する。
(もっと読む)
障害物回避支援装置
【課題】乗員に違和感を与えることなく、又は、与える違和感を少なくして車高を上げることが可能な障害物回避支援装置1aを提供する。
【解決手段】車高調整装置9を制御して車高を調整し、車両Cに障害物を跨いで回避させる障害物回避支援装置1aにおいて、車両Cの状態量に応じて、障害物を跨ぐ際の車高を変化させ、車両Cが旋回中には、車両Cの車輪11、21の舵角を調整する舵角制御装置1bを制御して、障害物に内輪近傍を通過させ、車高を変化させる際には、車両Cの後輪21の舵角を調整する舵角制御装置1bを制御して後輪21をトーインにする。
(もっと読む)
車両用操舵角制御装置
【課題】より高精度に操舵角を制御することが可能な車両用操舵角制御装置を提供すること。
【解決手段】左右の車輪の操舵角を独立して操作可能な車両に搭載される車両用操舵角制御装置であって、車体のロール角を検出するロール角検出手段と、該ロール角検出手段により検出された車体のロール角に起因する車輪のスリップ角を算出し、該算出した車体のロール角に起因する車輪のスリップ角を加味して左右の車輪の操舵角補正量を決定する操舵角補正量決定手段と、を備える車両用操舵角制御装置。
(もっと読む)
車両挙動制御装置
【課題】 前輪の縁石乗上げ時等における好ましくない車両挙動を抑制した車両挙動制御装置を提供する。
【解決手段】 前輪3fl,3frの縁石への乗り上げや陥没への落ち込みが起こり、ステップS2の判定がYesになると、操舵ECU7は、ステップS3でサスペンション4fl,4frの変位による前輪3fl,3frのトー角変化量を求めた後、ステップS4でこのトー角変化によるヨーモーメントおよび横力の増減量を算出する。次に、操舵ECU7は、ステップS3の算出結果に基づき、ステップS5でヨーモーメントおよび横力の増減を相殺する(すなわち、旋回を助長あるいは抑制する)ための転舵角補償値δcl,δcrを設定する。しかる後、操舵ECU7は、ステップS6で転舵角補償値δcl,δcrによって前述の後輪舵角δrl,δrrを補正する。
(もっと読む)
電動パワーステアリング・電動ダンパ・システム
【課題】操向ハンドルの操作感覚とサスペンション装置による乗り心地が矛盾無く容易に組み合わせることができる電動パワーステアリング・電動ダンパ・システムを提供する。
【解決手段】パワーステアリング用の電動モータ4と、トルクセンサ17を有し、電動モータ4の駆動を制御して操舵捕助力を出力する電動パワーステアリング装置301と、車輪の上下動をダンパ用の電動モータ35(図8中では35FL,35FR,35RL,35RRと表示)の回転に変換して、電動モータ35による減衰力を制御する電動ダンパ装置303(図8中では303FL,303FR,303RL,303RRと表示)における電動モータ4及び電動モータ35の制御が、1つのECU200に含まれるマイクロコンピュータのCPU上で実行される。
(もっと読む)
車両挙動制御装置
【課題】 車両のロール振動の発生を精度良く検出し適切にロール振動の発生を抑制できる車両挙動制御装置を提供すること。
【解決手段】 車両挙動制御装置1は、車両の横力を、スリップ角及び接地荷重の少なくとも一方を変数とした非線形の関数として演算し、その演算した横力と、少なくとも車両のロール角、ヨー角、上下変位と、に基づいて車両におけるロール振動の発生の有無を判断すると共に、その判断の結果ロール振動が発生すると判断された場合、ロール振動を抑制する。
(もっと読む)
振動減衰装置
【課題】 サスペンションの減衰力を高めると、高周波数帯域の振動が発生した場合には、振動を減衰しきれずに、振動が直接的に運転者に伝わりやすくなってしまうため、乗り心地が悪化してしまうおそれを回避する振動減衰装置の提供。
【解決手段】 自車両の前後振動がヨー方向の振動に連成されるか否かの判定を行い、自車両の上下振動を検出することによって乗り心地が悪化するか否かの判定を行う。このとき、自車両の前後方向がヨー方向の振動に連成され、且つ、自車両の乗り心地が悪化すると判定された場合に、サスペンションによる減衰力の増加を停止し、ステアリングのダンピング係数を増加させる。
(もっと読む)
車線保持装置、車線保持システム
【課題】コンピュータに異常が生じるような走行状況でも、走行車線からの逸脱傾向を検知して車線を維持する車線保持装置及び車線保持システムを提供すること。
【解決手段】舵角を制御する舵角制御手段22、14と、走行路の傾斜を検出する傾斜検出手段13と、車線近傍又は車線に設計速度に応じて設けられた凹凸を検出する凹凸検出手段11FR〜11RRと、凹凸検出手段により検出した信号の周期性から当該走行路の設計速度を検出する設計速度検出手段21と、を有し、舵角制御手段は傾斜及び設計速度検出手段により検出された設計速度に基づき舵角を決定する、ことを特徴とする車線保持装置を提供する。
(もっと読む)
車両の操舵制御装置及び操舵装置
【課題】車速が変化してもアッカーマンジオメトリを実現する。
【解決手段】本発明の操舵装置によれば、左右車輪のそれぞれの切れ角が独立に制御され、カーブの曲率と車速とに応じてアッカーマン比を満たすように左右車輪の切れ角がそれぞれ変化させられる。その結果、車両の走行時に車速が変化しても、アッカーマンジオメトリにしたがったカーブ走行を実現することができる。
(もっと読む)
操舵輪の振動に基づきパワーステアリング装置が制御される車輌
【課題】路面に対する車輪の滑りに基づくことなく路面に対する操舵輪の操舵抵抗の変化を検出してパワーステアリング装置の操舵補助力を変更することができ、更にはまたキックバックを抑制することもできるパワーステアリング装置を備えた車輌を提供する。
【解決手段】操舵輪の振動に応じてパワーステアリング装置の操舵補助力を変更する。操舵輪の上下振動の増大に応じて操舵補助力を減小させる制御と、操舵輪の横振動の増大に応じて操舵補助力を増大させる制御の2通りがある。
(もっと読む)
車両挙動制御装置
【課題】 車両のロール振動を精度良く検出しロール振動の発生を抑制できる車両挙動制御装置を提供すること。
【解決手段】車両のロール角、ヨー角、上下変位、横力をパラメータとするロール振動発生判定式を用いて車両におけるロール振動の発生の有無を判断し(S14〜S18)、ロール振動が発生すると判断された場合に車両のサスペンション特性を調整しロール振動を抑制する(S22)。車両のロール方向、ヨー方向、横方向及び上下方向の4自由度運動の連成により生ずる旋回中のロール振動発散現象の発生を精度良く予測することができ、過度に振動抑制制御を行うことなくロール振動の発生を的確に抑制できる。
(もっと読む)
車両の横転防止装置
【課題】精度良く的確に車両旋回時の横転を防止することが可能な装置を提供する。
【解決手段】ドライバの要求実舵角(δh)に応じて、加減速制御を受けない時の車両の規範旋回モデルに追従して該車両を実際に旋回させるようにヨーレート(γ)及び横滑り角(β)をフィードバック制御するときに必要な実舵角(δ)及び左右制動力差によるヨーモーメント(Mzb)を求めるとともに該ロール状態を抑制するためのロール角やロール角速度で求められる要求減速度(ax)及び該ヨーモーメントに基づいて各車輪(T1〜T4)へ分配すべき制動力(Fxi)を求め、該制動力に基づいて各車輪の制動力を制御すると共に、該実舵角に基づいて該車両の実際の舵角を制御する。
(もっと読む)
運転支援方法及び運転支援装置
【課題】 予め登録された場所で周辺状況に応じた運転操作の支援を行う運転支援方法及び運転支援装置を提供する。
【解決手段】 ナビゲーション装置1は、車両の位置及び方位を取得する自車位置検出部5と、後方カメラ25から取得した画像データを画像処理して、登録された地点と自車位置との相対距離と相対方位を算出する画像処理部15を備えている。制御部3は、初期位置から目標位置までの車両の運転操作を示す駆動履歴情報18を取得し、走行履歴情報記憶部16に格納する。そして、制御部3は、予め登録された初期位置に車両が接近した際に、登録された前記駆動履歴情報18に基づいて、車両を目標位置まで追従走行させる。
(もっと読む)
1 - 20 / 24
[ Back to top ]