
Fターム[3D232DC04]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 平均値処理 (99)
Fターム[3D232DC04]の下位に属するFターム
加重平均 (14)
Fターム[3D232DC04]に分類される特許
1 - 20 / 85
運転集中度基盤の車線維持制御装置およびその方法
モータ制御装置及び電動パワーステアリング装置
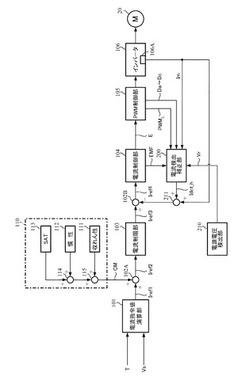
【課題】1シャント式でモータの電流検出を行い、作動音が少なく、トルクリップルを減少させたモータ制御装置及びそれを装填した電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいてインバータでモータを駆動制御すると共に、1シャント式電流検出器で前記モータの各相モータ電流を検出するようになっているモータ制御装置において、インバータの電源電圧、各相デューティ指令値、モータの逆起電圧情報、電流検出器で検出された各相モータ電流、PWMの配置情報及びモータの電気的特性式より電流検出補正値を算出する電流検出補正部を具備し、電流検出補正値により電流検出器で検出された各相モータ電流をモータ平均電流に補正してモータを駆動制御する。
(もっと読む)
車両運転支援装置

【課題】ドライバーの運転操作の経年的な衰えを検出し、検出した衰えに応じた車両運転の支援を行う。
【解決手段】ドライバーの年齢別およびブレーキ操作開始時の車速別に、車両のブレーキ操作開始から車両停止までの期間における、車両の減速挙動を表す減速挙動データ(制動距離、減速度の標準偏差)を、減速時学習データとして記録し、当該減速時学習データが記録された後、車両のブレーキ操作開始時(ステップ210)に、減速時学習データ中の最新の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、学習データ中の最新よりも過去の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、を比較し(ステップ220)、その比較結果に基づいて、ドライバーの運転能力が所定基準以上に衰えているか否かを判定し(ステップ230、240)、判定結果に応じて制動力を変化させる。
(もっと読む)
電動パワーステアリング装置
【課題】第1電流センサのバックアップ用として設けた低分解能の第2電流センサを使っている場合でも、良好な操舵アシストを行う。
【解決手段】第1電流センサ31の異常が検出されている場合には、異常時モータ制御量演算部80が電圧指令値V*を演算する。異常時モータ制御量演算部80は、操舵トルクtrに比例した基本電圧V0に、逆起電圧の推定値に相当する補正電圧V1と、逆起電圧を推定するための交流電圧V2とを加算した値(V0+V1+V2)を電圧指令値V*として設定する。
(もっと読む)
電動パワーステアリング装置
【課題】常に安全側へアシスト制御できるとともに、両トルク検出値を同時に変動させるノイズの影響を除去して耐ノイズ性を向上させた電動パワーステアリング装置を供する。
【解決手段】 車両のステアリング系の操舵トルクを、共通の中立電圧値(Vn)を通り互いに逆位相に設定された第1トルク検出電圧値(Vt1)と第2トルク検出電圧値(Vt2)として互いに独立に検出する第1トルクセンサと第2トルクセンサを備え、操舵トルク演算手段は、第2トルク検出電圧値(Vt2)を電圧の正負を逆にした第2トルク逆電圧値(-Vt2)に変換する逆電圧変換手段と、第1トルク検出電圧値(Vt1)と逆電圧変換手段が変換した第2トルク逆電圧値(-Vt2)との平均電圧値(Va)を演算する平均電圧値演算手段と、平均電圧値演算手段が算出した平均電圧値(Va)に中立電圧値(Vn)を加算して操舵トルク電圧値(Vt)を演算する中立電圧値加算手段とからなる電動パワーステアリング装置。
(もっと読む)
操舵装置
【課題】運転者の知覚特性に適合した操舵制御を行う。
【解決手段】操舵装置は、運転者が操舵ハンドルを操作する操作量に基づいて、車両が走行する道路の環境を特定する特定手段と、特定された環境に基づいて、操舵ハンドルに発生させる操舵減衰力を制御する制御手段とを備える。ダンピング制御部130は、基本ダンピング制御部131によって設定した基本ダンピングトルクTbと、調整ゲイン設定部1341によって道幅判定値に応じて設定した調整ゲインGaとの積をダンピングトルクとして設定する。
(もっと読む)
操舵装置
【課題】例えばスラント路を車両が直進走行する際、運転者の知覚特性に適合した操舵制御を行う。
【解決手段】操舵装置は、運転者が操舵ハンドルを操作する操作量に基づいて、車両が走行する道路の道路幅を特定する第1特定手段と、道路の道路幅方向の傾きを特定する第2特定手段と、特定された道路幅と特定された傾きとに基づいて、運転者による車両の操舵をアシストするためのアシストトルクを制御する制御手段とを備える。
(もっと読む)
ステアリング装置
【課題】路面摩擦係数に拘わらずに舵角センサの異常の誤判定を防止できるステアリング装置を提供することを課題とする。
【解決手段】ステアリングホイール3の操舵に応じて前輪1を転舵する電動パワーステアリング装置100であって、操舵トルクを検出するトルクセンサSTと、操舵角を検出する舵角センサ24と、操舵トルクの絶対値が第1閾値以下でかつ操舵角の絶対値が第2閾値以上であることを判定条件として舵角センサ24の異常を判定する舵角センサ異常判定部および前輪1を含んだ車輪と路面との摩擦力が所定値以下か否かを判定するグリップ判定部を有する操舵制御ECU130を備える。そして舵角センサ異常判定部は、前記摩擦力が前記所定値以下とグリップ判定部が判定した場合に、判定条件を厳しくして舵角センサ24の異常を判定しにくくすることを特徴とする。
(もっと読む)
ヨーレート較正装置
【課題】車両の走行状態における規範ヨーレート較正法だけでヨーレートセンサのゼロ点の較正ができるヨーレート較正装置を提供する。
【解決手段】ヨーレート較正装置100Aは、操舵方向を判定する操舵方向判定部15、車速演算部19、直進状態判定部12A、直進走行状態と判定された際の操舵角θHを記憶する操舵角記憶部13A、操舵角記憶部13Aに記憶された操舵角θHの値の分布に基づいて操舵角センサSHAの不感帯領域を演算する操舵角検出不感帯領域演算部14A、不感帯領域と操舵方向判定部15によって判定された操舵方向に基づいて操舵角θHを補正する操舵角補正部16、操舵角−ヨーレート特性データ104bと補正された操舵角θCHと車速VSとに基づいてヨーレートγのゼロ点を較正するヨーレートオフセット量演算部17及びヨーレートゼロ点補正部18と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】より適切なフィードバックゲインの変更を可能として良好な操舵フィーリングを維持しつつ静粛性の向上を図ることのできる電動パワーステアリング装置を提供すること。
【解決手段】起振力を有した変動成分を含む信号(操舵トルクの検出信号等)について、その変動成分に対応する特定の周波数成分を抽出する。そして、その周波数成分の強度Aに応じて、電流フィードバック制御の各ゲイン(Kp,Ki)を変更する。
(もっと読む)
車両制御装置
【課題】走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行うことが可能な車両制御装置を提供することを目的とする。
【解決手段】運転計画生成ECU18は、自車または他車両の走行実績のある前後Gxおよび横Gyに基づいて、路面μの上限および下限を設定し、路面μの上限以下の範囲で、または、下限以上の範囲で路面μを算出することにより、走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行う。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】モータ駆動電圧算出時のパラメータに発生するノイズを抑制し、モータをより安定的に駆動する。
【解決手段】オープンループ制御部22は、dq軸上の指令電流id*、iq*とモータの角速度ωe に基づき、モータの回路方程式に従いdq軸上の指令電圧vd 、vq を求める。dq軸/3相変換部23は、指令電圧vd 、vq を3相の指令電圧に変換する。R算出部26は、q軸指令電圧vq と電流センサ14で検出した電流値ia と角速度ωe に基づき、モータの回路方程式に含まれる電機子巻線抵抗を含む回路抵抗Rを求める。R平滑部27はR算出部26で求めたR値に対して平滑化処理を行い、オープンループ制御部22は指令電圧vd 、vq を求めるときに平滑化されたR値を使用する。モータの回路方程式に含まれる電機子巻線鎖交磁束数Φを求めるときにも、同様の平滑化処理を行う。
(もっと読む)
車両用保舵状態検出装置
【課題】 ドライバのステアリングホイールの保持状態の判定精度を向上させる。
【解決手段】 ステアリングホイールに加わる操舵トルクを検出し、検出した操舵トルクのパワースペクトルを計算する。ステアリング機構部の共振周波数fmchにおけるパワースペクトル値が第1閾値Pth0以上であるときは、ドライバはステアリングホイールを保持していないと判定する。共振周波数fmchにおけるパワースペクトル値が第1閾値Pth0未満であれば、ドライバはステアリングホイールを保持していると判定する。
(もっと読む)
車両用操舵装置及び車両用操舵方法
【課題】車両起因による片流れの抑制を精度良く行うことができる車両用操舵装置及び車両用操舵方法を提供する。
【解決手段】車両の直進走行状態を検出したときの転舵トルクTpの履歴に基づいて、直進走行時の転舵トルクTpを打ち消す方向の片流れ抑制操舵補助トルクを操舵系に付与する片流れ抑制制御を行う。このとき、操舵トルクTとヨーレートφとの差|T−φ|が所定の閾値TH1以上であるときには、操向輪の転舵に対して車両挙動が遅れている状態であると判断する。そして、この場合には、車両の直進走行状態を非検出として、そのときの転舵トルクTpを上記履歴に含めない。
(もっと読む)
稼動体の異常検出方法及び異常検出システム
【課題】外部からの影響によって異常程度の進展や監視信号が変化する場合でも、異常程度の進展を的確に捉えることができ、外部からの影響を排除して異常検出を精度よく行える稼動体の異常検出方法及び異常検出システムを提供する。
【解決手段】稼動体1のデータを継続して収集し、稼動体1のイベントを検出し、上記イベントで区切られた所定期間内に収集される上記データを対象データとして抽出し、あらかじめ異常検出のための比較用データを用意しておき、上記対象データと上記比較用データとを比較し、その比較結果に基づいて稼動体1の異常を検出する。
(もっと読む)
電動パワーステアリング装置
【課題】車両挙動の安定性の制御と、運転者の負担軽減のための制御との間で、調和をとって車両挙動の安定性を良好とする電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置を制御するECUのEPS制御部は、操舵トルクTSと車速VSにもとづいて操舵補助力を出力するように制御するベース電流算出部31の他に、車両挙動の安定性向上のアクティブ制御をする第1制御部を構成するハンドル戻し制御部32、アンダステア制御部33、オーバステア制御部34、ヨーレート反力制御部35、及びスプリットμ制御部36と、運転者のハンドル操作の負担を軽減するための制御をする第2制御部を構成する外乱抑制制御部37、車体流れ制御部38を含んでいる。そして、第1制御部が作動している場合には、第2制御部の出力のゲインを第1制御部の出力が所定値以上でゼロとする。
(もっと読む)
電動式パワーステアリング制御装置
【課題】操舵感覚に応じた的確な補助力を供給して、操舵フィーリングを良好にすることが出来る電動式パワーステアリング制御装置を提供する。
【解決手段】ステアリング1の操舵トルクTに基づいて微分指令値T1を算出し、操舵トルクTと車速Vに基づいて微分ゲインgと第1電流指令値I1とを算出し、操舵トルクTと角速度AVに基づいてゲインG1を算出し、微分指令値T1と微分ゲインgとに基づいて第2電流指令値I2を算出し、第1電流指令値I1とゲインG1とに基づいて第3電流指令値I3を算出し、第2電流指令値I2と第3電流指令値I3とに基づいて駆動電流指令値Idを算出し、当該駆動電流指令値Idに基づいてモータを駆動する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】モータ駆動回路に印加される電圧に基づき、配線抵抗等による制御精度の低下を解消または抑制し、高い精度でモータを駆動できるモータ制御装置を提供する。
【解決手段】角度算出部24はロータの角度θを求め、角速度算出部25はロータの角速度ωe を求める。指令電流算出部21は、操舵トルクTと車速Sに基づき、dq軸上の指令電流id*、iq*を求める。オープンループ制御部22は、指令電流id* 、iq* と角速度ωe に基づき、モータの回路方程式に従いdq軸上の指令電圧vd 、vq を求める。dq軸/3相変換部23は、指令電圧vd 、vq を3相の指令電圧に変換する。3相電圧補正部29は、配線抵抗等による上記印加電圧の低下を補償するため、低下がない場合の印加電圧の各相毎の時間平均値に実際の値が一致するよう指令電圧を補正する。この補正により配線抵抗等による制御精度の低下を解消または抑制できる。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサ故障時におけるアシスト力付与の継続可能性を拡大することのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、各出力電圧についての所定の出力範囲からの逸脱判定(ステップ102)、及び急変判定(ステップ103)により故障したホールICの特定ができなかった場合(ステップ103:NO)、各出力電圧を操舵トルクに換算した場合におけるその方向が同一であるか否かを判定する(ステップ106)。そして、その操舵トルクに換算した場合の方向が同一である場合には、これら各出力電圧の平均値を用いて暫定トルクを演算し、当該暫定トルクに基づいて、パワーアシスト制御を継続、詳しくは操舵系に対するアシスト力を緩漸減する(ステップ107)。
(もっと読む)
電動パワーステアリング装置
【課題】レゾルバ等のモータ回転角検出系が故障した場合であっても、操舵補助制御を継続可能とするとともに、操舵トルク方向に対して電動モータの回転方向が逆転するときにおいても、ハンドル振動を起こす可能性を防止または抑制し得る電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、電動モータの各線間逆起電圧の符号関係の情報に基づいて、電動モータの位置検出に必要な相対角量とその回転すべき相対角積算方向とを代替となる相対角度情報として決定する。
(もっと読む)
1 - 20 / 85
[ Back to top ]