
Fターム[3D232GG15]の内容
走行状態に応じる操向制御 (73,124) | 車種 (3,640) | 電気自動車 (74)
Fターム[3D232GG15]に分類される特許
1 - 20 / 74
自動車
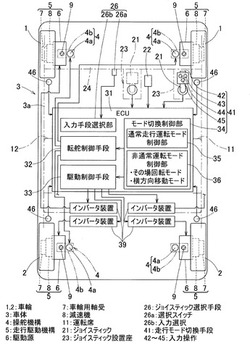
【課題】 その場回転または横方向移動等の非通常走行形態で走行できる自動車において、非通常走行形態と通常走行形態の間での走行形態の切り換えが、運転者が意図した状態で行えて、不測に切り換わることがないようにする。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される。これにより、その場回転や横方向移動となる非通常走行の運転を可能となる。この前提構成の自動車において、通常走行運転モードと非通常走行運転モードとの切換を、運転者の操作によって切り換える走行モード切換手段41を設ける。
(もっと読む)
操舵機構の制御装置

【課題】駆動モータ9の駆動指示量が全開に近い状態のときに、前進・後退を切換えるシフト操作を行うと、車両に慣性力が残っており、駆動輪5を駆動する駆動モータ9に多くの電力を要する。この状態にあるとき転舵モータ19の消費電力が大きいと、駆動輪5の駆動用の電力が不足するおそれがある。
【解決手段】駆動輪5を駆動する駆動モータ9の制御量を指示するアクセルペダル25の開度を検出し、前記アクセル開度が所定値以上であり、かつ、シフトレバー24の操作によって前進・後退切り換え信号の入力がある状態では、前記前進・後退切り換え信号の入力から所定の時間T以内において、前記転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定する。
【効果】シフト操作後の所定時間T以内において、転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定することにより、駆動輪の駆動用の電力の不足を解決する。
(もっと読む)
車両用制御装置
【課題】駆動システムの未始動時においても、車両ずり下がりを防止するための十分な制動力を発生させることができるとともに、十分な操舵アシスト力を発生させることができる車両用制御装置を提供する。
【解決手段】ハイブリッド車両に搭載される車両用制御装置であって、ハイブリッドシステムの始動および未始動を検出するHVECUを備え、HVECUが、ハイブリッドシステムの未始動時(ステップS1)に、シフトポジションセンサによりPレンジ以外のシフトレンジが検出され、かつ車速Vが発生したこと(ステップS2)を条件として、主バッテリと高圧回路とが電気的に接続されるようシステムメインリレーを制御する。
(もっと読む)
車両用転舵装置とその装置を用いた車両の駐車方法及び車両
【課題】駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
【解決手段】各操舵輪15に車輪の舵角を変える転舵アクチュエータ10を備えるとともに、そのアクチュエータ10の舵角を独立して制御する転舵制御手段11を備える。そして、前記制御手段11が操舵輪15の転舵アクチュエータ10を制御して、駐車の際、前記車輪15を車両の左右方向に向ける。こうすることで、転舵させた車輪と路面との間に摩擦を生じさせて車輪をロックし、車両を制動することにより、駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
(もっと読む)
インホイールモータを利用した車両制御方法
【課題】車体の安定性を確保するために、ESCシステムではなくインホイールシステムを利用することにより、車両を安定的に制御することができるインホイールモータを利用した車両制御方法を提供する。
【解決手段】操向角、ホイール速度、横加速度、ヨーレートを演算する段階、横加速度と予め設定された横加速度限界値を比較する段階、操向角、ホイール速度に基づいた運転手が要求する要求ヨーレートと車両の実測ヨーレートの差を予め設定されたヨーレートコントロール基準値と比較する段階、要求ヨーレートと実測ヨーレートの差がヨーレートコントロール基準値よりも大きい場合には、要求ヨーレートと実測ヨーレートを比較する段階、要求ヨーレートと実測ヨーレートの差によって最終トルク値を発生させる段階を含むことを特徴とする。
(もっと読む)
電気自動車
【課題】 電気制御式の操舵機構の異常や、左右の駆動輪のモータ駆動系の異常に対し、操舵機構と左右個別のモータとによる旋回走行の相互補完機能を利用し、上記異常の発生時に、ドライバーの意図した方向に進めるように制御できる電気自動車を提供する。
【解決手段】 左右の駆動輪2,2を駆動する独立したモータ6,6と、転舵機構11に機械的に連結されていないステアリングホイール14により操舵する操舵機構12を備える電気自動車に適用する。異常時補完手段37として、操舵系の異常の検出によって、その異常による転舵不足を補うように、左右駆動輪2,2のトルク指令の配分を変更する異常対応トルク配分変更部39を設ける。また、車輪駆動系の異常検出によって、その異常による左右両駆動輪2,2の駆動バランスの変化量を補うように、操舵機構12の転舵用モータ13の回転量を変更する異常対応転舵量変更部38を設ける。
(もっと読む)
乗用車両
【課題】車両の走行中に操舵した際の車両姿勢をより安定化することができる乗用車両を提供する。
【解決手段】フレーム部材11に対して回動自在に連結され左右方向に並設された対の支持部材31と、該両支持部材31に配設された対の後輪33とを備え、電気的駆動手段により走行駆動される乗用車両において、フレーム部材11に対する両支持部材31の回動角度をそれぞれ変化させて両後輪33の進行方向における位置を変化させる対の車輪位置駆動手段30とを備え、ハンドル12の操舵時に両車輪位置駆動手段30の片側のみを駆動して、両後輪33の進行方向における位置を互いに異なるように変化させる。
(もっと読む)
乗用車両
【課題】狭い場所で車両を回転させることができる乗用車両を提供する。
【解決手段】左右方向に並設されてフレーム部材11に配設された対の後輪33と、該後輪33に対し前側に配置されてフレーム部材11に設けられた前輪25とを備え、電気的駆動手段により走行駆動される乗用車両において、前輪25を路面から持ち上げる従動輪持ち上げ手段40を備え、両後輪33の回転速度を個別に変化させる。
(もっと読む)
車両用操舵装置
【課題】省エネルギに優れ、且つ耐久性を向上させることができる車両用操舵装置を提供する。
【解決手段】据え切り操舵や荷役同時操舵等の非省エネ操舵が行われると、認知手段としての警告灯が点灯され(ステップS5)、非省エネ操舵であること運転者に認知させる。目標操舵反力Th*の操舵角速度比例成分のゲインk2を2倍に増加し(ステップS6)、目標操舵反力Th*を増加補正する。操舵反力の増加により、運転者に非省エネ操舵をしていることを確実に気付かせる。反力制御部が、運転者に非省エネ操舵をしていることを認知させる認知手段として機能する。
(もっと読む)
車両の駐車支援装置およびそれを備える電動車両
【課題】車両の外部を撮影する撮影装置による送電ユニットの認識精度を向上させて給電設備に対する車両の駐車精度を向上させる。
【解決手段】車両100の制御装置は、給電設備200と車両100との間の距離がL1よりも大きいとき、カメラ120によって撮影される画像に基づいて給電設備200の駐車枠を認識し、上記の距離がL1以下になると、送電ユニット220の側面の画像に基づいて送電ユニット220を認識し、さらに上記の距離がL2(<L1)以下になると、送電ユニット220の上面の画像に基づいて送電ユニット220を認識する。そして、制御装置は、これらの認識結果に基づいて駐車支援制御を実行する。
(もっと読む)
車両の操舵感改善装置
【課題】パワーステアリング構成部品の仕様変更や、新たな手段の追加なしに、運転者が感じる操舵を適切な重さにして、修正操舵を行うことのないような操舵感を実現する。
【解決手段】t1以後の操舵中、設定時間TM1s中のモータトルク増大補正と、設定時間TM2s中のモータトルク減少補正とを順次行い、車輪駆動力を、運転者が加減速を感じない程度に繰り返し増減させる。車輪駆動力の繰り返し増減は、ステアリングラックのスラスト増減量として示すような操舵力の増減を生起させる。操舵力が繰り返し増減される場合、運転者は全体としては大きい方(増大中)の操舵力を強く感じ、運転者が感じる操舵力の重さをモータトルク増減時間TM1s,TM2sの設定のみにより適切な重さにし得て、運転者が車両との一体感や安心感を持てるように操舵感を改善することができる。
(もっと読む)
車両の操舵時挙動改善装置
【課題】操舵時におけるヨーイング挙動の線形性およびロールの抑制を、サスペンション装置の変更なしに実現する。
【解決手段】モータ駆動トルクを操舵開始時t1から所定時間TM1sが経過するt2までの間、目標モータトルクよりも実線波形で示す量だけ増大された値に補正し、t2から所定時間TM2sが経過するt4までの間、目標モータトルクよりも実線波形で示す量だけ減少された値に制御する。t2〜t4間のモータトルク減少補正は車両のロール速度を速くする内外輪荷重変化を生じさせ、内外輪側ショックアブソーバ・ストローク速度VsaboutおよびVsabinが、モータトルク減少補正非実行時のVsabin'およびVsabout'よりも速くなる。これによりショックアブソーバの振動減衰力が大きくなり、当該期間においてロール角を小さくでき、操舵中の車体ロール感を改善することができる。
(もっと読む)
低損失旋回による航続距離延長制御システム及び方法
【課題】前輪舵角と駆動力差モーメントとの最適な組み合わせによって旋回時に必要な横力を発生させることにより、コーナリング抵抗を低減することによってエネルギー消費を低減する低損失旋回による航続距離延長制御システムを提供すること。
【解決手段】航続距離延長制御システム100は、最適駆動力差モーメントNz*を算出する最適駆動力差モーメント演算手段101と、前輪舵角δfを算出する前輪舵角演算手段102と、各モータに配分するトルク指令値を算出し、その各トルク指令値に基づき各モータを個別に制御するトルク配分制御手段103とからなる。ドライバーが旋回半径に応じてアクティブステアリングを操作すると、前輪舵角のみで旋回する場合に必要となる前輪舵角指令δh*がアクティブステアリングから出力される。駆動力Faccはドライバーのアクセル操作から指令値として入力されるものとしてもよい。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムであって、車両の斜め前方への転倒を防止することが可能な車両運動制御システムを提供する。
【解決手段】制動かつ旋回状態にある場合において車両が転倒する可能性が高くなった場合に、車両がさらに旋回内側を向くように車両の運動を制御する。車両を旋回内側に向けることで、制動旋回によって車体に作用する力の向きを、車両が転倒しにくい向き、例えば、車幅方向に平行な向き等に変更することが可能となる。したがって、本車両運動制御システムによれば、車両の転倒を防止することが可能となる。
(もっと読む)
車両
【課題】高速走行時の直進安定性を高め、乗り心地の向上を図ることが可能な車両を提供する。
【解決手段】軌道に沿って設置されたガイドレールにガイドされて走行する車両に、左右の車輪のトーイン角度を調節可能なアクチュエータと、前記車両の進行方向に応じたトーイン角度となるように前記アクチュエータを制御するトーイン制御装置とを設ける。
(もっと読む)
ナビゲーション装置
【課題】電気自動車のバッテリ劣化を防止すると共に、そのために行うバッテリの放電エネルギーを有効に活用できるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置7を、電気自動車1の駆動用モータ3を制御するモータ制御装置10と通信可能に構成し、制御装置22は、電気自動車1が走行停止となっている期間が所定の閾値を超えると、駆動用モータ3を空転させる指令をモータ制御装置10に出力する。そして、駆動用モータ3が空転しない又は滑らかに回転しない等の異常だと判断した場合は、表示装置や音声出力装置によりその旨の報知を行う。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】スリップが発生する前に走行路面の路面μを推定する。
【解決手段】車両接地面摩擦状態推定装置は、車輪の制駆動力及び横力からなる合力並びに車輪のスリップ度を検出し(ステップS21、ステップS22)、車輪の制駆動力、横力及びスリップ度を座標軸とする3次元空間における、該制動力、横力及びスリップ度が零である原点と検出した現在の制駆動力、現在の横力及び現在のスリップ度が示す実測値との間の距離と、原点及び実測値を含む直線がタイヤ特性相関関係マップと交じわる交点と該原点との間の距離との比を基に、現在の路面の路面摩擦係数を算出する(ステップS23、ステップS24)。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】タイヤ特性の影響を受けないタイヤモデルに基づいて高い精度で路面μを推定する。
【解決手段】車両接地面摩擦状態推定装置は、基準タイヤにより基準路面摩擦係数の基準路面で得られる車輪のタイヤ力と車輪のスリップ度との相関関係で成立する特性線を表すタイヤ特性を想定してモデル化したタイヤ特性相関関係マップ45aを有する路面μ推定値演算部45と、検出したタイヤ力と検出したスリップ度との相関関係が直線関係となる領域における該タイヤ力と該スリップ度との比である線形域検出値比と、想定したタイヤ特性相関関係マップのタイヤ力とスリップ度との相関関係が直線関係となる領域における該タイヤ力と該スリップ度との線形域基準値比との比を補正係数とし、補正係数を基にタイヤ特性相関関係マップを補正する線形域Cp値推定部46及びマップ補正部47と、を備える。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】スリップが発生する前に走行路面の路面μを推定する。
【解決手段】車両接地面摩擦状態推定装置は、車輪の制駆動力及び横力からなる合力並びに車輪のスリップ度を検出し(ステップS21、ステップS22)、車輪の制駆動力、横力及びスリップ度を座標軸とする3次元空間における、該制動力、横力及びスリップ度が零である原点から検出した現在のタイヤ力の方向でかつ検出した現在のスリップ度まで延びる直線に該現在のタイヤ力の大きさを投影して得た距離と、前記直線を延長してタイヤ特性相関関係マップと交じわる交点と前記原点との間の距離との比を基に、現在の路面の路面摩擦係数を算出する(ステップS23、ステップS24)。
(もっと読む)
車両の駆動装置
【課題】左右の駆動輪が接地している場合にも一方への駆動力を他方へ分配できる車両の駆動装置を提供する。
【解決手段】駆動装置2は、相互に差動回転可能な第1差動ギア8L、第2差動ギア8R及びケース10を持つ差動機構7と、左側の駆動輪4Lと第1差動ギア8Lとの間に介在する第1電動機3Lと、右側の駆動輪4Rと第2差動ギア8Rとの間に介在する第2電動機3Rと、差動機構7のケース10を制動及び解放可能な中央ブレーキBCと、を有し、第1電動機3Lのアウター13Lが第1差動ギア8Lに、第2電動機3Rのアウター13Rが第2差動ギア8Rにそれぞれ連結されている。
(もっと読む)
1 - 20 / 74
[ Back to top ]