
Fターム[3D233CA29]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | センサの構成と配置 (1,698) | 操舵回転センサ、操舵角センサ (561)
Fターム[3D233CA29]に分類される特許
1 - 20 / 561
操舵制御装置
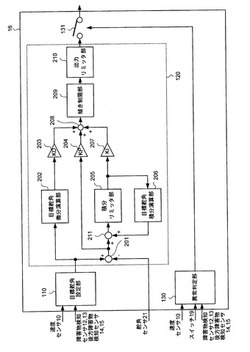
【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部(16)は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部(110)と、操舵輪(W)の実舵角を検出する実舵角検出部(21)と、目標舵角設定部(110)によって設定された目標舵角と、実舵角検出部によって検出された実舵角との偏差に基づいて算出される操舵部(2)の動作量を制御する操舵制御値を操舵部(2)に出力する操舵制御値演算部(120)と、操舵制御値演算部(120)によって算出される所定時間当たりの操舵制御値の変化を制限する傾き制限部(209)と、を備える。
(もっと読む)
ステアリング装置およびフォークリフト

【課題】機械的な接触を行うことなく、実際の操舵角を目標操舵角で適切に維持できるようにする。
【解決手段】実際の操舵角(検出操舵角)が目標操舵角に到達するまでは、ステアリング51の操作トルクに応じて操舵輪に付与される操舵トルクが、漸減舵角範囲にわたって上限値から下限値にまで減少していく一方、目標操舵角に到達した以降は、逆方向の操舵トルクが、この漸減舵角範囲よりも狭い急峻舵角範囲にわたって下限値から上限値にまで増加していく。このように、操舵トルクが変化する操舵角範囲を、目標操舵角への到達以降において狭くすることで、操舵トルクの変化率が大きくなるため、その到達前に比べて操舵トルクが急峻に上限値まで増加していく。こうして、実際の操舵角が目標操舵角に到達した以降は、逆方向の操舵トルクが十分に大きくならない、というような操舵角範囲も当然狭くなる(漸減舵角範囲>急峻舵角範囲)。
(もっと読む)
磁界角計測装置およびそれを用いた回転機
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、非磁性の第1の導体240と、非磁性の第2の導体242とを備えた磁界角計測装置であって、前記磁気センサは、前記第1の導体と前記第2の導体との間に配置され、前記第1の導体中の渦電流が前記磁気センサに及ぼす磁界と、前記第2の導体中の渦電流が前記磁気センサに及ぼす磁界とが、互いに打ち消しあう構成とする。
(もっと読む)
電動パワーステアリング装置
【課題】絶対位置センサまたは絶対操舵角センサを用いることなくラック軸位置を検出できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部32は、舵角センサ12によって検出される相対操舵角θsに基づいて、第1のピニオン17の角速度ωsを演算する。また、q軸電流指示値生成部32は、ロータ回転角θaに基づいて、第2のピニオン22の角速度ωaを演算する。q軸電流指示値生成部32は、第1のピニオン17の角速度ωsと第2のピニオン22の角速度ωaとの比(角速度比ωa/ωs)を演算する。軸電流指示値生成部32は、角速度比ωa/ωsと、ラック軸位置とラックゲイン比Gs/Gaとの関係を記憶したマップと、に基づいて、現在のラック軸位置を求める。
(もっと読む)
回転角度検出装置及びこれを用いた回転角度検出システム
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置、及びこれを用いた回転角度検出システムに関し、簡易な構成で、確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】回転角度検出装置13と13Aの制御手段12と12Aが、算出した回転角度を各々異なる所定時間後に出力すると共に、これらを接続し、他からの回転角度を検知した場合には、回転角度を出力しないように形成することによって、複数の回転角度検出装置13や13Aを用いた場合でも、車両の電子回路11には一つの回転角度の信号しか入力されないため、電子回路11の負荷が少なくなると共に、万が一、一方に故障等が生じた場合でも、他方からは回転角度が出力されるため、簡易な構成で、確実な回転角度の検出が可能なものを得ることができる。
(もっと読む)
車両用姿勢制御装置
【課題】ペダルの踏み込み量、ハンドル操舵量などを考慮して車両の姿勢制御を行うことにより、ドライバの意図するとおりの旋回走行をアシストすることができる車両用姿勢制御装置を提供する。
【解決手段】操舵角δと車速vとに基づいて、車両旋回時の目標横すべり角βsを算出する目標横すべり角演算部151と、操舵角速度δ′、アクセルペダルの踏み込み量A、アクセルペダルの踏み込み速度A′、フットブレーキペダルの踏み込み量Bの中から選択される少なくとも1つに対応して算出される横すべり角補正量Δβを用いて、前記目標横すべり角演算部151によって算出された目標横すべり角βsを補正する目標横すべり角補正部152と、前記目標横すべり角補正部152によって補正された目標横すべり角β*を用いて車両の姿勢制御を行う。
(もっと読む)
操舵制御装置
【課題】操舵制御装置において、車両が路面の轍や落下物を通過して車両の進路に影響するような外乱が入ったとしても、車両の安定性を確保して直進を継続しやすくすることにある。
【解決手段】操舵用制御手段(12)は、判定手段(12A)により運転者が操舵ハンドル(6)を握っていないと判定された時に、操舵ハンドル(6)をセンター位置に維持するように操作力軽減アクチュエータ(10)の作動を制御する制御信号をアクチュエータ制御手段(11)に出力する。
(もっと読む)
車両用操舵装置
【課題】車両が砂利道等を走行している場合に、転舵輪の振動が操舵部材に伝達されるのを抑制できる車両用操舵装置を提供する。
【解決手段】伝達比可変装置7は、第1シャフト11および第2シャフト12を差動回転可能に連結する差動機構13と、差動機構13を駆動する伝達比変更用モータ14とを有している。伝達比変更用モータ14は、実act角演算部76によって演算された実act角θactが目標act角演算部71によって演算された目標act角θact*に等しくなるようにフィードバック制御される。外乱判定部77によって第2シャフト12に外乱が入力されていると判定されたときには、伝達比変更用モータ14のフィードバック制御に用いられる比例ゲインKPが通常よりも低減される。
(もっと読む)
回転角計測装置,制御装置およびそれらを用いた回転機システム
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、前記磁気センサからの出力が入力される検出部302と、を備えた回転角計測装置であって、前記回転角計測装置は、磁束発生体202を備えた回転体121とともに用いられるものであり、前記磁気センサの出力は、前記磁界方向に対応した原角度信号セット155であり、前記検出部は、前記回転体の回転速度を引数とする補正関数が出力する補正値を用いて前記磁気センサの近傍に配置された非磁性の導体の影響を補正した補正角度を出力する。
(もっと読む)
パワーステアリング装置
【課題】コストの高騰を抑制しつつも転舵輪の舵角を検出することのできるパワーステアリング装置を提供する。
【解決手段】ステアリングホイール側ピニオン軸2に設けられた出力側レゾルバ7の軸倍角をk1とし、モータ側ピニオン軸に設けられたモータ側レゾルバ13の軸倍角をk2とし、モータ側ピニオン軸を一回転させたときにラック軸3を介して上記ステアリングホイール側ピニオン軸2が回転する回転角度をθa°とした場合に、(θa/k2)>(360/k1)であって、且つ(θa/k2)/(360/k1)が整数でない値となるように設定する。これにより、出力側レゾルバ出力信号S2の値とモータ側レゾルバ出力信号S3の値との組み合わせが、異なる舵角で同一の値をとることがなくなり、両レゾルバ出力信号S2,S3から舵角を導出することが可能となる。
(もっと読む)
モータ駆動装置
【課題】 回転角センサ線とECUとの接続部を小型にできるモータ駆動装置を提供する。
【解決手段】 モータアッセンブリ8に取り付けられるECU3は、基板30およびヒートシンク20を備える。基板30は、モータ80の回転角に基づいてモータ80の駆動を制御するマイコンが電気的に接続される。ヒートシンク20は、基板30を固定する。ここで、基板30は、モータ80の回転角を検出する回転角センサ85に接続されている回転角信号線61とはんだ付けすることにより電気的接続可能なスルーホール31からなる第1スルーホール群および第2スルーホール群を有する。
(もっと読む)
電動パワーステアリング装置
【課題】 ブラシ付モータ20のブラシの位置ずれを検出する。
【解決手段】 位置ずれ検出部80は、モータ実電流Imとモータ端子間電圧Vmと回転角速度ωとに基づいて、モータ20の逆起電圧定数Keを計算し、そのデータ(Ke,Im)をサンプリングする(S31〜S34)。そして、電流方向別にモータ実電流Imに対する逆起電圧定数Keの特性を表す近似式を計算し(S35)、プラス方向のモータ実電流Imに対する逆起電圧定数Keの近似式の1次係数A1と、マイナス方向のモータ実電流Imに対する逆起電圧定数Keの近似式の1次係数A2のとの偏差ΔAが判定基準値Arefを超える場合に、ブラシの位置ずれが生じていると判定する(S39)。
(もっと読む)
操舵絶対角検出装置および車両用操舵装置
【課題】検出が容易な操舵絶対角検出装置を提供する。
【解決手段】操舵軸の回転角区間(例えば1回転360°毎)にそれぞれ応じたラック軸8の軸方向区間を設けた。軸方向区間毎に仕様の異なる複数の被検出面(平坦面341〜344)を、ラック軸8の表面8bに設けた。距離検出器33が、何れの被検出面(平坦面341〜344)を検出するかによって、ラック軸8の軸方向区間(操舵軸の回転角区間に相当)を特定する。特定された回転角区間に対応する回転角基準値に、トルクセンサの第1レゾルバにより検出された回転角値を加算して、操舵絶対角を求める。
(もっと読む)
電動パワーステアリング装置
【課題】構造を複雑にすることなく耳障りな歯打ち音等の発生を抑制する技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、電動モータの回転駆動力が伝達されるウォームギアと、前輪を転舵させるラック軸を移動させるピニオンシャフトと、ピニオンシャフトと同軸的に連結された下部連結シャフトとの相対回転角度を検出する相対角度検出装置と、ウォームギアと噛み合うことにより電動モータの回転駆動力をピニオンシャフトに伝達するウォームホイールと、相対角度検出装置が検出した相対回転角度に基づいて電動モータの駆動を制御する制御装置と、を備え、制御装置は、前輪側から外力を受けて相対回転角度が周期的に変化する場合に、ウォームギアの歯とウォームホイールの歯とが衝突する際に生じる歯打ち音の周波数を変更するように電動モータの駆動を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】構造を複雑にすることなく耳障りな歯打ち音等の発生を抑制する技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、電動モータの回転駆動力が伝達されるウォームギアと、前輪を転舵させるラック軸を移動させるピニオンシャフトと、ピニオンシャフトと同軸的に連結された下部連結シャフトとの相対回転角度を検出する相対角度検出装置と、ウォームギアと噛み合うことにより電動モータの回転駆動力をピニオンシャフトに伝達するウォームホイールと、相対角度検出装置が検出した相対回転角度に基づいて電動モータの駆動を制御する制御装置と、を備え、制御装置は、前輪側から外力を受けて相対回転角度が周期的に変化する場合に、ウォームホイールの歯が動く方向と同じ方向にウォームギアの歯が動くように電動モータの駆動を制御する。
(もっと読む)
回転角度検出装置および電動パワーステアリング装置
【課題】簡単な構成でメインギヤと検出ギヤ間のバックラッシによる検出誤差を補正し、精度の高い回転角度を検出できる回転角度検出装置および電動パワーステアリング装置を提供する。
【解決手段】回転検出手段から出力される検出信号に基づいてステアリングシャフトの回転角度を演算するともに、ステアリングシャフトの回転角速度が所定値以上である場合に、操舵トルク検出手段により検出される操舵トルクに基づいて演算されるトーションバーの捩れ角と、ステアリングシャフトの回転角度との差分から、メインギヤと検出ギヤ間のバックラッシによる誤差を補正するためのバックラッシ補正値を演算する回転角度演算手段と、バックラッシ補正値に基づいてステアリングシャフトの回転角度を補正する回転角度補正手段とを備える。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、検出する回転角度の誤差が少なく確実な角度検出が可能なものを提供することを目的とする。
【解決手段】磁石15A、15Bや磁石16A、16Bを第一及び第二の検出体12、13の回転中心C1、C2から所定間隔離れて対面配置すると共に、第一及び第二の検出体12、13の回転中心C1、C2上に磁気検出素子7、8を対向配置することによって、磁石15A、15Bや磁石16A、16Bの間に発生する直線状の磁力線の範囲が拡がるため、磁気検出素子7、8の位置ズレが多少生じても、検出信号の誤差が小さく、検出される回転角度の誤差を少なくすることができる。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、部品点数が少なく安価なものを提供することを目的とする。
【解決手段】カバー20に外方開口の略箱状で、側壁部20Bに端子21が内外方に貫通したコネクタ部20Aを一体に形成すると共に、内方の端子21の接続部21Aに配線基板17を接続することによって、カバー20にコネクタ部20Aが一体に形成されているため、部品点数が少なく安価な回転角度検出装置にすることができる。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】モータ抵抗推定部27は、たとえば、加算角リミッタ24から出力される加算角αの絶対値が所定の閾値B以下であるときに、モータ抵抗Rを推定する。誘起電圧推定部28は、モータ抵抗推定部27によって推定されたモータ抵抗Rを用いて、モータ3の回転によって生じる誘起電圧を推定する。回転角推定部29は、誘起電圧推定部28によって推定された誘起電圧に基づいて、ロータ50の回転角の推定値θEを演算する。ロータ角変位演算部30は、演算周期間の推定回転角θEの変化量を求めることによって、演算周期当たりのロータ50の角変位Δθを求める。加算角ガード41は、必要時において、ロータ角変位演算部30によって求められるロータ角変位Δθに基づいて加算角αを補正する。
(もっと読む)
角度検出器及び電動パワーステアリング装置
【課題】 製造コストを低減可能な角度検出器等を提供する。
【解決手段】 角度検出器100は、第1の回転体12と、第2の回転体32と、前記第1の回転体及び前記第2の回転体を連結する連結部22と、前記第1の回転体と連動する第1の副回転機構13と、前記第1の副回転機構の回転状態を検出する第1の検出機構14と、前記第2の回転体と連動する第2の副回転機構33と、前記第2の副回転機構の回転状態を検出する第2の検出機構34と、前記第1の副回転機構の回転状態と前記第2の副回転機構の回転状態とに基づき前記連結部のねじれ状態を演算する第1の演算部42と、前記第1の回転体と連動する仮想の副回転機構15の回転状態と前記第1の副回転機構の回転状態とに基づき前記第1の回転体の回転角を演算する第2の演算部44とを備える。仮想の副回転機構15の回転状態は、連結部22のねじれ状態に基づく。
(もっと読む)
1 - 20 / 561
[ Back to top ]