
Fターム[3D301EC37]の内容
Fターム[3D301EC37]の下位に属するFターム
調整速度/時定数を可変 (31)
制御タイミング (122)
Fターム[3D301EC37]に分類される特許
1 - 20 / 495
サスペンション制御装置
【課題】サスペンションのストローク速度の推定精度を向上可能とする。
【解決手段】制御装置(20)が、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分(Vb0)に基づいて目標周波数(fc)を設定する。続いて、制御装置20が、サスペンションのストローク速度(Vz)から目標周波数(fc)を含む周波数帯域の成分を除去する。また、制御装置20が、除去後のストローク速度(Vz)(ストローク速度推定値(VzSH))に基づいて、サスペンションのストローク状態を制御する。
(もっと読む)
車両のロール角推定方法及び装置

【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】車両に発生する加速度が予め設定された所定加速度以上である場合、更新禁止状態であると判定し、所定加速度未満である場合、更新禁止状態ではないと判定する。更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両のロール角推定方法及び装置
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】左右サスペンションの何れか一方の荷重−変位特性(バネ特性)が線形近似可能な範囲ではない場合、更新禁止状態であると判定し、更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両
【課題】車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び本体部を備える車体と、車体を操舵する操舵可能な操舵輪と、操舵不能な非操舵輪と、操舵指令情報を入力する操舵装置と、操舵部又は本体部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、操舵装置から入力された操舵指令情報に基づいて操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、制御装置は、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
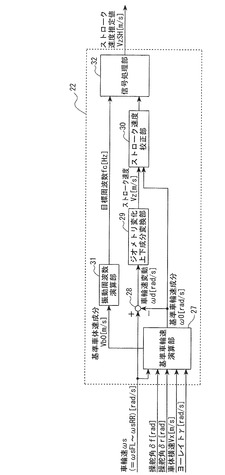
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsが含んでいる成分のうち、サスペンションのストロ−クに伴う車輪14の車両前後方向への変位に起因する成分である車輪前後変位成分ωzyに基づいて、サスペンションのストロ−ク速度Vzを推定する。そして、推定したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。この構成によれば、例えば、サスペンションがストロ−クすると、車輪14に車両前後方向への変位が発生するところ、サスペンションのストロ−クに伴う車輪前後変位成分ωzyに基づくことで、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
車両
【課題】乗員の動揺に関する乗り心地を向上させることができるようにする。
【解決手段】一対のサイドサポート部22によって、シート20に着座している乗員の左右方向の動きを抑制するように乗員の胴体部を拘束する。車両のサスペンションのサスペンション特性により、車室部のロール方向の共振周波数が、乗員の頭部の左右方向の共振周波数帯域の下限以下に設定されている。これによって、乗員の胴体部の左右方向の動きを抑制すると共に、頭部の左右方向の揺れを抑制するため、乗員の動揺に関する乗り心地を向上させる。
(もっと読む)
キャンバ制御装置
【課題】燃費を十分に良くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪にキャンバを付与するためのキャンバ可変機構と、車両に振動が発生しているかどうかを判断する振動発生判断処理手段と、車両に振動が発生していると判断された場合に、所定の車輪にキャンバを付与するキャンバ付与処理手段とを有する。車両に振動が発生していると判断された場合に、所定の車輪の各タイヤに、互いに対向する方向にキャンバスラストが発生させられるので、車両を十分に安定させて走行させることができる。燃費を十分に良くすることができる。
(もっと読む)
走行支援システム
【課題】自車両の走破性能を調整して地図上にない走行経路や災害等で不整地となった走行経路の走行を支援する。
【解決手段】他車両1が地図上にない不整地2(走行経路)を走行した際の状況に基づいて自車両3が不整地2を走行できるか否かを判断し、自車両の走破性能で走行が可能であれば自車両3の走破性能を調整して走行を支援する。
(もっと読む)
車両用エアサスペンション制御装置
【課題】車両用エアサスペンション制御装置を提供する。
【解決手段】車両1前部における左右のフロントエアスプリング4の圧力11aを検出するフロント圧力センサ11と、車両1後部における左右のリヤエアスプリング5の圧力12aを検出するリヤ圧力センサ12とを設け、フロントレベリングバルブ8とリヤエアスプリング5とをつなぐエア管路7途中にカットバルブ13を設け、通常モード中に、車両1がうねり路にいるか否かを判断し、該車両1がうねり路にいる場合には、前記カットバルブ13を閉じる制御信号13aを出力し、前記車両1前部における左右それぞれのレベリング制御を強制的に休止させるコントローラ14を設ける。
(もっと読む)
車両用エアサスペンション制御装置
【課題】車両の前輪と後輪が接地する路面の高さが左右で異なるうねり路を確実に判定することができ、且つ圧縮エアの消費を抑制し得る車両用エアサスペンション制御装置を提供する。
【解決手段】車両1前部における左右の車高を検出するフロント車高センサ11と、車両1後部における左右の車高12aを検出するリヤ車高センサ12とを設け、フロントレベリングバルブ8とリヤエアスプリング5とをつなぐエア管路7途中にカットバルブ13を設け、通常モード中に、車両1がうねり路にいるか否かを判断し、該車両1がうねり路にいる場合には、前記カットバルブ13を閉じる制御信号13aを出力し、前記車両1前部における左右それぞれのレベリング制御を強制的に休止させるコントローラ14を設ける。
(もっと読む)
車両用エアサスペンション制御装置
【課題】車両の前輪と後輪が接地する路面の高さが左右で異なるうねり路においても、車両の左右一方の前輪が浮き上がったりすることを防止しつつ、クラウチング制御を確実に行うことができ、且つ圧縮エアの消費を抑制し得、更にコストダウンを図り得る車両用エアサスペンション制御装置を提供する。
【解決手段】クラウチング制御が行われていない通常モード中に、車両1前部における左右の車高11aの差の絶対値が予め設定された閾値以上で、且つ、車両1前部における左右の車高11aの差と圧力センサ18で検出される車両1後部における左右のリヤエアスプリング5の圧力18aの差との積が負となる場合に、車両1がうねり路にいると判断し、コントローラ13からカットバルブ16,17を閉じる制御信号16a,17aを出力し、車両1後部における左右それぞれのレベリング制御を強制的に休止させる。
(もっと読む)
車高調整装置
【課題】車高を所望の範囲内に効率良く収めることが可能な車高調整装置の提供。
【解決手段】車高調整制御部は、左右のサスペンションのそれぞれについて、検出変位と検出内圧とロール剛性係数とを用いて、左右のエアサスペンションが共に目標変位に設定された車高調整完了状態での内圧を目標内圧(PLb,PRb)として算出し、検出内圧と検出変位とを乗算した検出乗算値(PL_now×ZL_now,PR_now×ZR_now)が、目標内圧と目標変位とを乗算した目標乗算値(PLb×Zb,PRb×Zb)に近づくように、電磁バルブを制御する。
(もっと読む)
車高調整装置
【課題】イグニッションスイッチIGがオフされているときの消費電力を低減可能な車高調整装置(車両)100を提供する。
【解決手段】車高調整を行う車高調整手段5と、イグニッションスイッチIGのオンで起動して、車高調整手段5による車高調整を制御する制御手段9とを有する車高調整装置100において、車体1の下部に設けられ、障害物と接触した場合に信号を制御手段9に出力する接触検知手段2を有し、制御手段9は、イグニッションスイッチIGのオフで停止し、停止後に接触検知手段2から信号が入力すると起動し、車高調整を制御した後に再び停止する。制御手段9は、イグニッションスイッチIGのオフによる直近の停止後に、信号が入力した入力回数を信号が入力して起動する度にカウントし、その直近の停止から入力回数が所定回数を超えるまでの経過時間が所定時間未満である場合に、故障検知フラグを発生させ記憶する。
(もっと読む)
キャンバ制御装置
【課題】所定の車輪にキャンバが付与されることで運転者が違和感を覚えるのを防止することができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両が極低μ路を走行しているかどうかを判断する走行路判断処理手段と、該走行路判断処理手段によって、車両が極低μ路を走行していると判断された場合に、極低μ路用のキャンバ解除条件が成立したかどうかを判断するキャンバ解除条件成立判断処理手段と、キャンバ解除条件成立判断処理手段によって、極低μ路用のキャンバ解除条件が成立したと判断された場合に、所定の車輪へのキャンバの付与を解除するキャンバ解除処理手段とを有する。操舵部材を操作したときにタイヤに大きなキャンバスラストが発生するのを防止することができる。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】操舵操作を行ったときに、ロール挙動が増大することを抑制可能とすること。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分である前輪荷重の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、前輪荷重の変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し合計値を基にドライバ要求トルクを補正する。
(もっと読む)
車両用制御装置
【課題】撮像手段による撮像内容を用いて、自車の走行車線を維持するように車両を制御する車両用制御装置に関し、車輪のキャンバ角を調整することで、走行車線を維持可能な車両用制御装置を提供する。
【解決手段】車両用制御装置100は、フロントカメラ85により前方の走行車線DLを撮像し、画像処理部86により画像解析することにより、走行車線DLにおける左車線境界LL、右車線境界LR、自車位置を特定する。特定結果に基づき、自車が当該走行車線を逸脱しそうであると判断すると、当該車両用制御装置100は、右後輪2RR、左後輪2RLに夫々配設されたキャンバ角調整装置90を制御して、何れか一方の車輪に係るキャンバ角を、他方の車輪と異なるキャンバ角に変更し、キャンバースラストにより走行車線DL中央へと導く。
(もっと読む)
車両用電動ダンパ装置
【課題】車輪の上下運動を最適に減衰させて車両の乗り心地を向上させることができるとともに、早々に熱に変換されないで、しかも、常時回生させることができる車両用電動ダンパ装置とする。
【解決手段】車両用電動ダンパ装置は、車体に対する車輪の相対的な上下運動を回転運動に変換して電動モータ35L,35Rを回転させることにより上下運動を減衰させるようにし、また、車輪の上下運動を減衰させるための減衰力を電動モータが発生する。車両用電動ダンパ装置は、車輪が上下方向に変位する変位速度を算出する変位速度検出部と、変位速度に基づいて電動モータの目標駆動電流を設定する駆動電流設定部と、目標駆動電流に基づいて電動モータを駆動制御するモータ駆動部106L,106Rとを有している。
(もっと読む)
車両制御装置
【課題】制御可能なスタビライザを備えた車両における消費エネルギーを低減することができる車両制御装置を提供すること。
【解決手段】車両1のサスペンション4の減衰力を変化させる減衰力可変機構20、あるいはサスペンションの弾性力を変化させる弾性力可変機構の少なくともいずれか一方と、車両に生じるロール方向の振動を抑制するアンチロールモーメントを可変制御する制御量可変スタビライザ10と、を備え、操舵状態と車両に生じる振動に応じて制御量可変スタビライザの制御量を設定する。
(もっと読む)
1 - 20 / 495
[ Back to top ]