
Fターム[3F022QQ04]の内容
Fターム[3F022QQ04]に分類される特許
1 - 20 / 48
無人搬送車
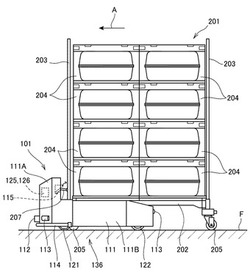
【課題】無人搬送車による被牽引台車の走行を安定させる。
【解決手段】無人搬送車101のベース111は、被牽引台車201をその幅方向Bに挟み込む形状をなしている。ベース111には、旋回自在の自在輪121と一対の固定輪122とが設けられる。無人搬送車101と被牽引台車201とが連結されると、無人搬送車101の一対の固定輪122は、被牽引台車201の固定キャスタ206を幅方向Bに挟み込む。 無人搬送車101の検知部116が製造現場等に布設されたガイド線GTを検知すると、無人搬送車101は、検知部116の検知結果に応じて進行する。
(もっと読む)
物品搬送装置

【課題】搬送経路の分岐または合流に際し、より簡単な構造で搬送経路のレイアウトに自由度を持たせることができる物品搬送装置を提供する。
【解決手段】分岐/合流部5は、2本の外側走行レール70A、70Bと、2本の内側走行レール71A、71Bと、走行切替機構52とを有する。走行切替機構52は、2本の内側走行レール71A、71Bの基点91から2本の外側走行レール70A、70B側に向かって延設し、上面に台車ユニット4の車輪60の走行面を備える揺動アーム53と、揺動アーム53を2本の外側走行レール側70Aまたは70Bに切り替えて連接させる揺動部50とを備え、揺動部50は、拡開した2本の内側走行レール71A、71Bにより挟まれた空間に設けられる。
(もっと読む)
移載装置及び移載装置の閉動作方法
【課題】開閉するアーム部で物品を移載する移載装置において、アーム部が荷物を移載可能に閉じるまでの閉動作の時間を短縮できるようにする。
【解決手段】移載装置は、荷物を他の装置との間で移載可能な移載装置である。移載装置は、アーム部と、荷物検出部と、アーム制御部と、を備える。アーム部は、第1アームと前記第1アームと対向して配置される第2アームとを有する。アーム部は、少なくとも一方のアームが他方のアームに対して開閉する。アーム部は、第1アームと第2アームとの間で荷物を移載可能である。荷物検出部は、アーム部の開閉動作と連動して移動可能である。荷物手検出部は、他の装置にある荷物を非接触で検出可能である。アーム制御部は、アーム部の閉動作のとき、荷物検出部が荷物を検出するまでは開閉アーム部を高速で閉動作させる。アーム制御部は、荷物検出部が荷物を検出するとアーム部を低速で閉動作させる。
(もっと読む)
ピッキング作業用端末
【課題】操作を頻繁に行うピッキング作業に用いても、長期間に渡って使用することができる耐久性を有するレバースイッチを備えたピッキング作業用端末を提供する。
【解決手段】作業者にピッキングのタイミングを指示する指示手段と、該ピッキングの完了確認のために使用されるレバースイッチ200と、を備え、前記レバースイッチ200は、レバー本体210と、該レバー本体210の動作によりオン状態とオフ状態とをスイッチング可能な非接触式のスイッチング素子250と、レバー本体210の一部を挟んで待機位置で支持するとともにスイッチング素子250をオン状態若しくはオフ状態へ切り換えるためのレバー本体210の動作を許容可能に支持する支持手段260と、を備える。
(もっと読む)
処理設備
【課題】被処理物に対して処理を行って処理物を得る複数の工程室と、被処理物または処理物からなる被搬送物を搬送容器に収納して搬送し、これら工程室に対して搬送容器の受け渡しを行う搬送領域とが設けられた処理設備において、工場の配置レイアウトの自由度が大きい処理設備を提供する。
【解決手段】複数の工程室21が平面的に配置された処理フロア1の階上に、搬送容器Cの搬送を行う物流フロアを設けると共に、処理フロアと物流フロアとの間の天井面11に受け渡し口を形成し、物流フロアを走行する搬送車5により受け渡し口を介して処理フロアと物流フロアとの間において搬送容器Cの受け渡しを行う。そして、物流フロアにおいて、搬送車5の走行する搬送路に沿って、搬送容器Cを載置するための棚71を設ける。
(もっと読む)
処理設備
【課題】被処理物に対して処理を行って処理物を得る工程室が複数設けられた処理設備において、工場のレイアウトを容易に行うことができると共に、処理設備を建設した後に簡便に改造できるようにすること。
【解決手段】複数の工程室21が平面的に配置された処理フロア1と、この処理フロア1の階下に設けられ、被処理物または処理物が内部に収納された搬送容器Cの搬送を行う物流フロア2と、を設けると共に、処理フロア1と物流フロア2との間において搬送容器Cの受け渡しを行う受け渡し口22を工程室の床面11に設けて、物流フロア2の搬送装置5により受け渡し口22を介して搬送容器Cを昇降させることによって、物流フロア2と工程室21との間において搬送容器Cを受け渡す。また、この受け渡しの際には、振れ止め機構90により、昇降アーム52の振れを抑える。
(もっと読む)
処理設備
【課題】被処理物に対して処理を行って処理物を得る複数の工程室と、被搬送物を搬送してこれら工程室に対して被搬送物の受け渡しを行う搬送領域とが設けられた処理設備において、工程室と搬送領域との間を区画すると共に当該工程室と搬送領域との間において被搬送物の受け渡しを行う予備清浄室を設けながら、内部の領域の配置レイアウトの自由度が大きい処理設備を提供すること。
【解決手段】複数の工程室21が平面的に配置された処理フロア1の階下に、搬送容器Cの搬送を行う搬送領域が形成された物流フロア2を設けると共に、工程室21と搬送領域との間にエアロック室50を設ける。また、フロア1、2間の床面11に受け渡し口22を設けて、物流フロア2を走行する搬送車5により、受け渡し口22を介して物流フロア2と処理フロア1との間で搬送容器Cの受け渡しを行う。
(もっと読む)
タイヤ積込装置及びタイヤ積込方法
【課題】タイヤをラックに積み込む際、より低出力で積み込むことができ、しかもタイヤに傷がつくことを抑制すること。
【解決手段】タイヤを起立姿勢で収納するラックにタイヤを積み込むタイヤ積込装置であって、複数のタイヤを起立姿勢で所定の配列方向に並べた状態で支持する載置ユニットと、前記載置ユニットに起立姿勢で載置された前記複数のタイヤを前記載置ユニットから前記ラックのタイヤ収納部へ押し出す押出手段と、を備えたことを特徴とする。
(もっと読む)
移載装置
【課題】アームの先端部を水平に保ちながら物品を移載できるようにすると共に、物品をより正確な位置に荷下ろしできるようにする。
【解決手段】昇降台6にスカラアーム18を設け、アーム19、20の先端部の傾斜を検出するためのセンサ28と、アーム上の物品の位置を測定するためのセンサ30とを設ける。検出した傾斜を打ち消すように基台をチルトさせると共に、測定したアーム上の物品の位置に応じてアームの伸張量を補正する。
(もっと読む)
移動棚設備
【課題】移動棚の幅ずれ制御を精度良く行い得る移動棚設備を提供する。
【解決手段】幅方向に沿って所定間隔置きで駆動車輪が設けられてなる移動棚が移動して幅ずれが生じた場合、幅ずれ量検出手段32にて検出された幅ずれ量を入力して、移動棚の少なくとも左右の端部駆動車輪の回転速度を制御して幅ずれ量をなくすように駆動車輪の電動機を制御するための幅ずれ制御手段46を有し、この幅ずれ制御手段46により、入力された幅ずれ量に基づき制御目標値である幅よせ量を求める際に、移動棚の移動時に検出される棚固有の移動特性を考慮するようになし、且つ棚固有の移動特性を、今回の移動により得られた現幅ずれ量に、前回の同じ移動方向での移動により得られた前幅ずれ量を加算した値としたものである。
(もっと読む)
移動棚設備
【課題】中間位置に複数の駆動車輪を有する移動棚の姿勢制御を安価な構成で行い得る移動棚設備を提供する。
【解決手段】幅方向に沿って所定間隔置きで駆動車輪が設けられてなる移動棚が傾斜した際に、その姿勢を修正し得る制御手段41を有する移動棚設備であって、制御手段に、左右端部に設けられたエンコーダで検出された両端部の移動量の差である前後ずれ量を求める前後ずれ量演算部42と、この前後ずれ量をなくすような端部減速値を求めて移動方向で先行している先行端部の駆動車輪用モータのインバータに出力する端部減速値演算部43と、前後ずれ量を入力し中間部駆動車輪用モータのインバータに、中間部減速値を求めて出力する中間部減速値演算部44とを具備し、中間部減速値は、端部減速値に、基準距離と、後行端部の車輪を基準とする基準位置から各中間部駆動車輪位置までの中間距離との比を乗算して得られる値としたものである。
(もっと読む)
積込装置
【課題】部品が収容されたパレットを無動力で無人搬送車に積み込むことのできる積込装置を提供する。
【解決手段】本積込装置1は、部品2が収容されるパレット3を滑動させる滑動面5を有し、該滑動面5が下方傾斜する積込シュータ4と、該積込シュータ4の滑動面5の下端に備えられ、パレット3の滑動を停止及び開放するシュータ側ストッパ11と、搬送台車6に備えられ、パレット3を滑動させる滑動面10を有し、該滑動面10が積込シュータ4の滑動面5と略同一平面を形成するように下方傾斜する受け台8と、を備えているので、部品2が収容されたパレット3を無動力で搬送台車6に積み込むことができる。
(もっと読む)
個別包装薬剤自動供給装置
【課題】丸もの薬剤11を袋12に密封した個別包装薬剤10を多数収納しておいて姿勢良く而も確実に逐次供給するコンパクトな個別包装薬剤自動供給装置60を実現する。
【解決手段】鉛直面で循環移動しうる無端条帯41の外周に多数の個別収容部材20が列設されており無端条帯41の上側部分が水平に張られており個別収容部材20が丸もの薬剤11より高さの低い上面解放の箱体からなり個別包装薬剤10を一つ立てて収容しうるようになっている整列収納順次排出機構部40と、その整列収納薬剤のうち先頭薬剤が無端条帯41の循環移動に伴って前に倒れてほぼ水平になるところに受けローラ54が軸方向を水平にして且つ無端条帯41の上側部分の進行方向と直交させて設けられており受けローラ54を軸回転させて先頭薬剤を個別収容部材20から抜き取る取出機構部50とを備える。受けローラ54の上方に押えローラ55も設ける。
(もっと読む)
パレット搬送装置
【課題】大きな駆動モータを用いることなく、ストックライン間においてパレット台車を移動させることができるパレット搬送装置を提供する。
【解決手段】固定フレーム5に対して回転自在に取り付けられた回転ブラケット6と、この回転ブラケット6の回転軸Oから離れた位置に取り付けられ、ワーク搬送用のパレット台車2を搭載可能に構成されたコンベヤ部4と、前記回転ブラケット6の回転軸Oを中心として前記コンベヤ部7の反対側に取り付けられたバランス重り8と、前記回転ブラケット6を回転駆動するアクチュエータ9とを備え、前記回転ブラケット6の回転軸Oからコンベヤ部7までの距離は、前記アクチュエータ9によって回転ブラケット6を180°回動駆動したときに、前記コンベヤ部7をパレット台車2の第1ストックライン4Aに連結させる第1位置P1および前記コンベヤ部7をパレット台車2の第2ストックライン4Bに連結させる第2位置P2の間で往復させることができる距離である。
(もっと読む)
ワーク移動用装置
【課題】加工ライン、組立ラインにおける異なる床面高さにも対応でき、作業者の大幅削減を可能とし、安全に搬入搬出が行えて、不良品発生時などの不定常作業の標準化が可能なワーク移動装置及び移動方法の提案。
【解決手段】搬送対象物(E)を載置するフロワ部分(7)と、搬送対象物(E)を専用台車(AGV)からフロワ部分(7)まで移動し或いはフロワ部分(7)から専用台車(AGV)まで移動する機能を有する移動機構(8)と、前記フロワ部分(7)を上下させる機能を有するアウトリガ(6)と、制御装置(3)とを有している。
(もっと読む)
自動倉庫における荷の移載装置
【課題】荷の移載装置を軽量にして省電力化を図ることができ、かつ自動倉庫の省スペース化を図ることができる自動倉庫における荷の移載装置を提供すること。
【解決手段】荷4は、荷台17側の端部に手掛部4aを備え、荷の移載装置13は、荷台17と荷棚3との間で荷4を移載するために手掛部4aに係合または離脱する係脱部35を有する移載部材19と、荷台17における荷4の移載方向に移載部材19をスライド移動させる移動手段29と、を備え、移載部材19は、移動手段29に対して係合される係合部30をさらに有し、荷台17と荷棚3との間で荷4を移載する際に、係合部30における荷棚3側の一部の移動手段29に対する係合状態が解除される。
(もっと読む)
自動倉庫
【課題】保守点検時にスタッカクレーンを確実に自動制御不能な状態にし得る装置を設ける。
【解決手段】荷を収容する複数の収容部を有する枠組棚と、枠組棚に対して移動して収容部に荷を搬送するスタッカクレーン3と、スタッカクレーン3を自動制御する制御装置とを有する自動倉庫1であって、スタッカクレーン3には、保守点検用の梯子5が設けられている。梯子5には、梯子5に対する作業者の昇り降りを検知する昇降検知器7が設けられている。制御装置は、昇降検知器7からの検知信号に基づいて作業者が梯子5に昇ったと判断した際にスタッカクレーン3を自動制御不能な状態にする。
(もっと読む)
移動体システム
【課題】リニアモータのリニアスケールからの座標を用いて、移動体間の干渉を防止する。
【解決手段】走行ルートに沿ってリニアモータの1次側コイルを配列すると共に、移動体にリニアモータの2次側を設ける。走行ルートを複数のゾーンに分割して、各ゾーンのゾーンコントローラによりゾーン内のコイルを制御する。コイルのリニアスケールを基準とする移動体の座標を、走行ルートを基準とする座標に変換し、移動体の速度と先行の移動体との距離を求める。求めた距離と先行の移動体の速度とから、先行の移動体との干渉防止速度を求めて、コイルを制御する。
【効果】先行の移動体との間隔を不必要に大きくする必要が無く、システムの効率が改善する。
(もっと読む)
自動倉庫と自動倉庫へのクリーンエアの供給方法
【課題】搬送台車の走行風による、自動倉庫の保管物品の汚染を減ずる。
【解決手段】搬送台車30の走行スペースの左右両側にラックを設けると共に、前記走行スペースから見た前記ラックの背面側にラック内へクリーンエアを供給手段を設け、走行スペースもしくはラックの底部に排気口を設けた自動倉庫において、スタッカークレーン8の位置と速度及び昇降台20の位置と速度とを、クリーンルームコントローラへ入力し、スタッカークレーンの周囲でクリーンエアの供給量や排気量を補正する。
(もっと読む)
レールレス移動ラック
【課題】レールレス移動ラックにおいて侵入検知センサの光軸はずれを抑制すること。
【解決手段】移動ラックには隣り合う他のラックとの間への障害物の侵入を投光部271で出射された光が受光部272で受光されているか否かによって検出する侵入検知センサ27が設けられている。侵入検知センサ27は回転モータ29により回動可能に設けられ、回転モータ29は投光部271から出射された光が受光部272に入射するように台車の姿勢に対応して制御盤によって制御される。
(もっと読む)
1 - 20 / 48
[ Back to top ]