
Fターム[5H115TO03]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 加加速度、ジャーク検出 (26)
Fターム[5H115TO03]に分類される特許
1 - 20 / 26
鉄道車両用異常診断システム
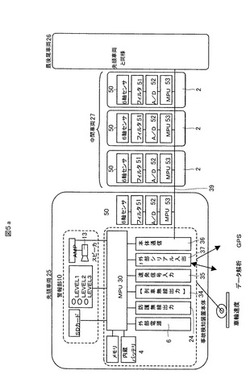
【課題】鉄道車両に取り付けられたセンサユニットからの検出信号に基づいて脱線、転覆、衝突等の重大事故の異常を判定する異常判定装置に、定期検査で行われるような車両や軌道の異常を検知し処理する機能を付加した鉄道車両用異常診断システムを提供する。
【解決手段】先頭車両25及び最後尾車両26に加えて、中間車両27にも、6軸センサ50を備え、その測定値を車輪回転速度やGPS信号とともにMPU53で演算し、異常診断をする。脱線、転覆、衝突に至らなくても、定期検査で保守点検員の目視による調査や専用の異常診断装置によって行われていた車輪のフラット或いは車軸や軸受についての異常診断、乗り心地評価、或いは軌道の検査を、通常の営業車両で実行できるようになるため、人件費や設備投資の削減ができる。また、検査の頻度を格段に増やしてタイムリーに車両劣化診断を行うことができ、一層の安全向上を図ることができる。
(もっと読む)
ハイブリッド車両の制御装置

【課題】 エンジンアイドル時の振動や音を抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 第1締結要素が解放されているときには、エンジンのアイドル時の目標エンジン回転数をエンジンの燃費を高める第1目標アイドル回転数に設定し、第1締結要素が締結されているときには、エンジンのアイドル時の目標エンジン回転数をエンジンによる共振を抑制する第2目標アイドル回転数に設定するようにした。
(もっと読む)
車両用制御装置
【課題】摩擦締結要素を保護するための保護制御が行われ易い状態にあることを、ドライバに対して、適切に告知することのできる車両用制御装置を提供すること。
【解決手段】動力源10,20と駆動輪54との間に介装され、前記動力源と前記駆動輪とを断接する摩擦締結要素25を備える車両に対して制御信号を出力する車両用制御装置であって、前記摩擦締結要素の温度を検出する温度検出手段64と、前記摩擦締結要素の締結トルクを制御する締結トルク制御手段と、前記摩擦締結要素の温度が所定の第1温度以上である場合に、前記締結トルク制御手段を制御し、前記摩擦締結要素の前記締結トルクを、所定の周期で繰り返し変化させるトルク振動制御を行うトルク振動制御手段と、を備えることを特徴とする車両用制御装置を提供する。
(もっと読む)
制御装置
【課題】出力部材の回転速度が比較的低い場合であっても、内燃機関始動制御の開始時における第二係合装置のスリップ開始判定を精度良く行うことができる制御装置の実現。
【解決手段】内燃機関11に駆動連結される入力部材Iと車輪15に駆動連結される出力部材Oとを結ぶ動力伝達経路上に、第一係合装置CS、回転電機12、第二係合装置C1、の順に設けられた車両用駆動装置1を制御対象とする制御装置3。回転電機12のトルクを車輪15に伝達しながら内燃機関11を始動させる内燃機関始動制御を実行可能に構成され、内燃機関始動制御を実行するために第二係合装置C1を完全係合状態からスリップ状態へ移行させるに際して、少なくとも低車速状態である場合に、ロータ12bの回転位置を検出する回転センサSe2の出力に基づく回転電機12の回転加速度の変化量がスリップ判定量以上となったときに第二係合装置C1がスリップを開始したと判定する。
(もっと読む)
電気車制御装置
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更を不要とし、電力変換回路の数を抑制して車体の振動乗り心地を改善する。
【解決手段】車体が搭載される2台の台車のうち,前方の台車の前方の車輪を駆動する電動機と後方の台車の前方の台車を駆動する電動機とが並列接続され,前方の台車の後方の車輪を駆動する電動機と後方の台車の後方の車輪を駆動する電動機とが並列接続され,2組の並列接続した電動機の組み合わせに対し逆方向の振動トルクが重畳するように制御することにより電動機のトルク変動を用いて2台の台車に同一の上下力を発生させてそれぞれの台車の上下振動を抑制することにより車体が前後線対称形状に弾性変形する振動を間接的に抑制することを特徴とする電気車制御装置。
(もっと読む)
車両制御装置
【課題】アクセルオンからアクセルオフに移行したときの消費エネルギーを小さくし、エネルギー効率を高くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、キャンバ付与条件が成立したかどうかを判断するキャンバ付与条件成立判断処理手段と、キャンバ付与条件が成立した場合に車輪にキャンバを付与するキャンバ付与処理手段と、ニュートラル走行設定条件が成立したかどうかを判断するニュートラル走行設定条件成立判断処理手段と、ニュートラル走行設定条件が成立した場合に、駆動源と駆動輪との間のトルクの伝達を遮断するニュートラル走行設定処理手段とを有する。駆動源における摩擦、イナーシャ等が抵抗になって消費エネルギーが大きくなることがない。
(もっと読む)
ハイブリッド車両のアンチジャーク制御装置及び方法
【課題】モータートルク制御を利用してクラッチの解除時をはじめ変速時やチップインまたはチップアウト時に駆動軸に振動現象の発生を防止できるハイブリッド車両のアンチジャーク制御装置及び方法を提供する。
【解決手段】ハイブリッド車両のアンチジャーク制御装置において、駆動軸の振動が無視された状態でモーターのモデル速度を算出するモデル速度算出部と、モーターのモデル速度と実際速度間の速度偏差から基準速度偏差及び速度偏差の平均値を算出すると共に速度振動成分を検出して、駆動軸の振動発生可否を判定する振動発生判定部と、振動発生判定部で駆動軸の振動が発生したと判定すると、駆動軸の振動を低減させるためのアンチジャーク用モーター補正トルク量を算出して、モータートルクを制御する補正トルク演算部とを含めて構成される。
(もっと読む)
車両の制御装置
【課題】登坂路において車両のずり下がりを抑制する。
【解決手段】HV_ECUは、推定勾配を算出するステップ(S100)と、坂路であって(S102にてYES)、車速の絶対値がV(0)以下であると(S104にてYES)、推定勾配の変化をレートリミット処理するステップ(S106)と、ヒステリシス処理を実施するステップ(S110)と、クリープアップ係数を算出するステップ(S112)と、クリープアップトルクを算出するステップ(S114)とを含む、プログラムを実行する。
(もっと読む)
電気自動車用充電スタンド
【課題】スタンドの損傷等によって充電スタンド内から露出した電力供給線と、人間や自動車との接触による感電事故を防止可能な電気自動車用充電スタンドを提供する。
【解決手段】地面上に自立する支柱部内部に電力供給線を備えた電気自動車用充電スタンドであって、該電力供給線が、接続コネクタで接続される複数の電線からなり、接続コネクタが、一次側の電線端部に設けた下部コネクタと、二次側の電線端部に設けた上部コネクタとから構成され、該下部コネクタと上部コネクタは、接続状態下で、一次側の電線から二次側の電線への通電を行い、該電線に対して、外的衝撃力に起因する張力が発生した際、接続コネクタの該接続状態が解除される。
(もっと読む)
電気自動車の車両制御装置
【課題】各車輪を別個独立した電気モータによって駆動する電気自動四輪車において、実際の走行状況に応じてより適切なヨーモーメントを発生させる。
【解決手段】車両制御装置100は、、ナビゲーション装置200から出力された曲率情報に基づいて理想操舵角δiを算出する操舵角演算部140と、操舵角演算部140によって算出された理想操舵角δi、実操舵角δr、及びナビゲーション装置200から出力された車速、加速度、ヨーレート等に基づいて、各車輪に対して制御すべき制御前後力FXi’(各車輪の駆動力)を演算する駆動力演算部129と、演算された各車輪の制御前後力FXi’(駆動力)に基づいて、インホイールモータ30FL,30FR,30RL,30RRに供給する電流値iを制御する電気モータ制御部131とを備える。
(もっと読む)
車両
【課題】倒立振り子の姿勢制御を利用した車両の走行及び姿勢制御にスライディングモード制御を適用し、走行状態及び車体姿勢を目標状態に誘導するスライディング平面を設定して、安定的かつ滑らかに目標とする状態に近づけることによって、走行及び姿勢制御の安定性及びロバスト性をより高めることができ、様々な走行条件に対して、安全に、かつ、快適に走行することができるようにする。
【解決手段】車体と、該車体に回転可能に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、操縦装置の操縦操作量に基づいて前記駆動輪又は前記車体の目標状態を決定し、決定した目標状態に基づいてスライディング平面を決定し、実状態と前記目標状態と前記スライディング平面との位置関係によって前記駆動トルクを決定する。
(もっと読む)
車両
【課題】乗員の個人差による車体全体の重心位置の変化を容易に、かつ、迅速に補正することができ、制御プログラムが複雑化することなく、乗員に不快感や不安感を与えることがなく、車体の姿勢が安定に保たれ、安全に、かつ、快適に走行することができるようにする。
【解決手段】車体と、車体に回転可能に取り付けられた駆動輪と、前後方向に移動可能に車体に取り付けられた能動重量部と、能動重量部を移動させる第1アクチュエータ及び第2アクチュエータと、駆動輪に付与する駆動トルク及び能動重量部の位置を制御して車体の姿勢を制御する車両制御装置とを有し、車両制御装置は、車体の姿勢を制御する場合に第1アクチュエータを作動させ、重心位置の初期調整を行う場合に第2アクチュエータを作動させる。
(もっと読む)
車両
【課題】広い制御範囲に亘って、車体の姿勢制御の応答性及び精度を高めることができ、かつ、エネルギ消費量を抑制することができ、車体の姿勢が安定に保たれ、安全に、かつ、快適に走行することができるようにする。
【解決手段】車体と、該車体に回転可能に取り付けられた駆動輪と、前後方向に移動可能に前記車体に取り付けられた能動重量部と、該能動重量部を移動させる複数のアクチュエータと、走行指令を入力する操作装置と、該操作装置から入力された走行指令に応じ、前記駆動輪に付与する駆動トルク及び前記能動重量部の位置を制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、制御パラメータの区分に応じて前記複数のアクチュエータを使い分ける。
(もっと読む)
車両
【課題】上り段差に到達する直前に、車両の加速度を増加させるとともに、車体の重心を段差の上段側に移動させることによって、高速で上り段差に進入した場合でも常に安定した車両動作を維持し、段差がある場所でも安全かつ快適に走行することができるようにする。
【解決手段】車体と、該車体に回転可能に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面の上り段差に接触する前に、車両の加速度を増加させるとともに、車体の重心を段差の上段側に移動させる。
(もっと読む)
車両
【課題】倒立型車両における駆動トルクの逆動作をなくす。
【解決手段】車体姿勢制御に必要な駆動トルクと車両走行制御に必要な駆動トルクの向きが異なる場合が存在し、車両の加減速と車体傾斜は、駆動モータ52の作用・反作用によって行うため、加速しながらの車体前傾や減速しながらの車体後傾はできない。そこで、車両目標加速度α*に応じた目標車体姿勢の決定において、車両目標加速度α*に応じて、目標車体傾斜角加速度を制限し、それを搭乗部移動によって補うことによって、駆動トルクの逆動作をなくす。
(もっと読む)
電気自動車の駆動システム及びタイヤ
【課題】各車輪を個別独立した電気モータにより駆動する車両において、タイヤ交換した場合でも、各車輪の稼動状態に応じた最適な駆動力を制御することができるようにする。
【解決手段】タイヤ21のタイヤデータを、タイヤ内部に設けたデータモジュール40から車両制御装置100に送信し、車両制御装置内に記憶させる。車両制御装置100では、前記タイヤデータに基づいて演算した実前後力F^Xと目標車両前後力F*Xとの誤差FeX、実横力F^Yと目標車両横力F*Yとの横力誤差FeY、実ヨーモーメントM^Zと目標ヨーモーメントM*Zとの誤差MeZ、及び車輪の実前後力F^Xと実横力F^Yに対する各車輪の接地荷重FZiに基づいて定められる各車輪のタイヤ稼働率ηi を用いて、各車輪に対して制御すべき制御前後力FXi’を演算し、この制御前後力FXi’に基づいて、インホイールモータ30(FL〜RR)に供給する電流値iを制御する。
(もっと読む)
電気自動車の回生制動力制御装置
【課題】、コストや手間の増大を抑制しながら、電気自動車における回生制動力を適切に制御することが出来るようにする。
【解決手段】アクセルペダル16の踏み込みが無い場合に電動発電機12を発電機として作動させ通常回生制動力Tbを目標回生制動力TcBとし回生制動を実行する回生制動実行手段42と、電気自動車12に作用する重力により生じる駆動力を示す駆動力値Fに応じ追加回生制動力Tbhを算出する追加回生制動力算出手段41とを備え、回生制動実行手段42は、追加回生制動力Tbhを通常回生制動力Tbに加算して上記の目標回生制動力TcBとし、回生制動を実行するようにする。
(もっと読む)
ヨー制御装置及び電気自動車
【課題】 制御誤差の溜まりによる目標ヨーモーメントGYMの発散を確実に防止すること。
【解決手段】
車体速Vと操舵角δに基づいて目標ヨーレイトGYRを演算する目標ヨーレイト演算手段21と、演算された目標ヨーレイトGYRの微分値にヨー慣性モーメントIを乗算することによって目標ヨーモーメントGYMを演算する目標ヨーモーメント演算手段23と、演算された目標ヨーモーメントGYMと実ヨーモーメントYMの偏差に基づいてPID制御により操作量Hを演算する操作量演算手段29と、演算された操作量H(HC)に基づいて電動モータ7a,7b,7c,7dのモータトルク指令値TPa,TPb,TPc,TPdを演算するモータトルク指令値演算手段35と、演算されたモータトルク指令値TPa,TPb,TPc,TPdに基づいて電動モータ7a,7b,7c,7dを制御するモータ制御手段37と、を具備したこと。
(もっと読む)
複数の動力分散方式の機関車を含む列車のために鉄道列車の運転を最適化するための方法および装置
【要課題】軌道に沿った運行中に本務駆動ユニット(14/15)および非本務駆動ユニット(16/17/18)を含む鉄道輸送手段(8)を運転するためのシステムを提供する。
【解決手段】システムは、輸送手段の位置または現在の運行の開始からの時間を判定するための第1の要素(65)と、第1の要素(65)から情報を受信するように動作可能なプロセッサ(62)と、情報にアクセスして、輸送手段(8)、本務ユニット(14/15)、および非本務ユニット(16/17/18)のうちの1つまたは複数に関する1つまたは複数の運転基準に従って本務ユニット(14/15)および非本務ユニット(16/17/18)のうちの一方または両方の性能を最適化する運行計画を生成する、プロセッサ(62)内に具現化されたアルゴリズムとを含む。
(もっと読む)
鉄道列車の列車内の力を制限する方法および装置
先頭車両編成と非先頭車両編成と気動車とからなる鉄道システムを運転する装置において、ノードにより表される鉄道システム区画のスラック条件を判断する第1の要素と、前記先頭車両編成または前記非先頭車両編成の引張力または制動力の適用を制御するように構成される制御要素とを含む装置。  (もっと読む)
(もっと読む)
1 - 20 / 26
[ Back to top ]