
Fターム[5H580FA02]の内容
ステッピングモータの制御 (5,935) | 制御、演算又は駆動 (1,049) | フィードバック制御するもの (319) | 電流をフィードバックするもの (120)
Fターム[5H580FA02]に分類される特許
1 - 20 / 120
ステッピングモータの制御装置
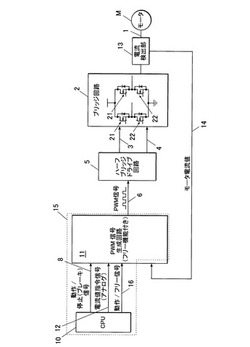
【課題】ハーフブリッジドライブ回路のPWM信号入力部に入力する信号を制御することによって、ステッピングモータを回転フリーの状態に制御できるステッピングモータの制御装置を提供する。
【解決手段】マイクロプロセッサ(CPU)10からフリー信号が信号線16を介してPWM信号生成回路11に入力されると、PWM信号生成回路11は、すべての相について、ハーフブリッジドライブ回路5のPWM信号入力部にPWM信号のONレベルに相当する制御信号を出力することにより、上段FET21をONに下段FET22をOFFにするとともに、当該制御信号の出力を維持することにより、ブートストラップコンデンサ53を放電させて上段FETをターンオフさせ、上下段FETがOFFにされてステッピングモータMが回転フリーの状態に制御する。その後回転駆動前に、PWM信号のOFFレベルに相当する制御信号を所定時間出力することで充電する。
(もっと読む)
ステッピングモータの駆動制御装置および駆動制御方法、駆動制御システムならびに光学機器

【課題】ステッピングモータの振動量を簡易な構成で低減すること
【解決手段】ステッピングモータ107、108の複数の巻線を励磁する駆動信号を制御する駆動制御装置は、複数の巻線に流れる励磁電流の検出結果を取得し、A相に対応する巻線の励磁電流波形において設定された第1の基準時T01から設定電流値Ithを与える時間までの第1の時間差Taと、B相に対応する巻線の励磁電流波形において設定されて第1の基準時に対応する第2の基準時T02から設定電流値Ithを与える時間までの第2の時間差Tbとの差が減少するように駆動回路119、120をフィードバック制御するマイクロプロセッサ111を有する。
(もっと読む)
ステッピングモータ駆動装置及び画像形成装置
【課題】モータ出力トルク不足による脱調を回避する適切な励磁電流値を決定し、かつ決定された励磁電流値に応じた適切な前励磁時間を決定する。
【解決手段】ステッピングモータ47と、ステッピングモータを駆動させるステッピングモータ制御部43と、ステッピングモータが回転したかどうかを検知する着脱検知部35と、ステッピングモータに印加する電流値を指示する信号及びステッピングモータの駆動を制御する駆動制御信号をステッピングモータ制御部に出力することにより、ステッピングモータ制御部によるステッピングモータの駆動を制御するCPU40を備え、CPUは、着脱検知部35からの検知信号に基づいてステッピングモータの電流設定値を決定し、かつ、決定した電流設定値において前励磁時間を決定する。
(もっと読む)
遊技機
【課題】ステッピングモータの無負荷運転を早期に検出可能な遊技機を提供し、遊技機が発火するなどの異常の発生を防止すること。
【解決手段】パチンコ遊技機1は、装飾可動体42と、装飾可動体の駆動源たる第1ステッピングモータ63及び第2ステッピングモータ67と、両モータ63,67の駆動を制御する駆動制御手段(ランプ制御基板24、駆動回路96、駆動回路104により構成される)と、駆動制御手段から両モータへの通電波形を測定する測定手段(電圧測定部100,108、A/D変換部101,109、ランプ制御基板24により構成される)と、測定手段により測定された通電波形情報に基づいて、両モータの駆動状態を判定する判定手段(ランプ制御基板24により構成される)と、を備え、判定手段によりいずれかのモータが所定時間以上継続して無負荷運転していると判定されたとき、駆動制御手段は、両モータの駆動を停止させる。
(もっと読む)
制御装置、アクチュエータシステム、及び制御方法
【課題】回転速度の高い領域においてステッピングモータのトルクを効率的に向上する。
【解決手段】制御装置20は、ステッピングモータ32の回転角の目標値を生成する位置指令生成部211と、回転角の目標値と検出値との偏差に基づいてステッピングモータ32の回転速度を算出する位置制御器213と、算出された回転速度に対応して昇圧電圧を算出する昇圧指令処理部218と、モータ電源電圧を昇圧する昇圧回路22と、ステッピングモータ32に供給するパルス信号を生成するPWMインバータ25と、を備える。
(もっと読む)
ステッピングモータの制御装置およびステッピングモータの制御方法
【課題】時々の負荷に対して最適な駆動電流を設定することで消費電力を低減し、さらに、脱調予兆の情報を元に駆動電流値のマージンを設定し、使用条件や環境により負荷が大きくなった場合でも脱調を起こすことなくモータを制御する。
【解決手段】ステッピングモータ100を駆動する駆動電流を設定する駆動電流設定部121と、ステッピングモータ100の駆動波形から負荷を検出する負荷検出部124と、負荷検出部124で検出された負荷がある閾値を超えた際に、脱調の予兆があると判定する脱調予兆判定部125と、ステッピングモータ100の負荷に対して、さらに当該負荷に所定の増加分を見込んだマージン値を設定するマージン設定部128と、脱調の予兆があると判定したときに出力する脱調予兆信号を元に駆動電流を制御する際に、マージン設定部128で設定されたマージン値を含む駆動電流とする駆動電流最適化制御部130と、を備える。
(もっと読む)
ステッピングモータの駆動回路、その集積回路およびそれを備える電子機器、ならびに、ステッピングモータの駆動回路の制御方法
【課題】ステッピングモータの駆動回路において、ステッピングモータへ励磁電流を供給するための配線の異常を検出する。
【解決手段】ステッピングモータ200の駆動回路100は、D/Aコンバータ120と、比較部131,132を含む電流制御部130と、異常検出部170とを備える。D/Aコンバータ120は、ステッピングモータ200に流れる励磁電流IOUT1,IOUT2の上限値を示す参照電圧VREFに基づいて定められる励磁電流についての目標値を示す目標電圧VA1,VA2を生成する。電流制御部130は、この目標電圧に基づいて励磁電流を制御する。比較部131,132は、励磁電流に対応する電圧RNF1,RNF2と目標電圧とを比較する。異常検出部170は、比較部からの出力信号CLOUT1,CLOUT2を用いて、所定期間内に励磁電流が電流リミット値に到達した回数に基づいて、駆動回路100とステッピングモータ200との間の配線の異常を検出する。
(もっと読む)
ステッピングモータの制御装置およびステッピングモータの制御方法
【課題】ステッピングモータの負荷を常時モニタして、モータを脱調させることなくその時々の負荷に対して最適な駆動電流の設定を可能として、消費電力の低減を図る。
【解決手段】ステッピングモータ100を駆動する駆動電流を設定する駆動電流設定部121と、ステッピングモータ100の駆動波形から、その負荷を検出する負荷検出部124と、検出された負荷がある閾値を超えた際に、脱調の予兆があると判定する脱調予兆判定手部125と、駆動電流を可変して負荷に必要な脱調しない最小の駆動電流に設定する駆動電流最適化制御部130と、を備え、駆動電流最適化制御部130は、可変制御される所定時間が経過するごとに、脱調予兆判定部125による脱調予兆の有無情報にしたがって駆動電流を可変制御する。
(もっと読む)
ステッピングモータの駆動回路、その集積回路およびそれを備える電子機器、ならびに、ステッピングモータの駆動回路の制御方法
【課題】ステッピングモータの駆動回路において、ステッピングモータへ励磁電流を供給するための配線の異常を検出する。
【解決手段】ステッピングモータ200の駆動回路100は、D/Aコンバータ120と、比較部131,132を含む電流制御部130と、異常検出部170とを備える。DAC120は、ステッピングモータ200に流れる励磁電流IOUT1,IOUT2の上限値を示す参照電圧VREFに基づいて定められる励磁電流についての目標値を示す目標電圧VA1,VA2を生成する。電流制御部130は、この目標電圧に基づいて励磁電流を制御する。比較部131,132は、励磁電流に対応する電圧RNF1,RNF2と目標電圧とを比較する。異常検出部170は、比較部からの出力信号CLOUT1,CLOUT2と、励磁電流の極性を示す制御信号PHA1,PHA2とに基づいて、駆動回路100とステッピングモータ200との間の配線の異常を検出する。
(もっと読む)
モータ制御装置
【課題】 ステッピングモータの第1の励磁コイルに直列接続された第1の電流検知手段とステッピングモータの第2の励磁コイルに直列接続された第2の電流検知手段との間の検知誤差に起因するステッピングモータの回転ムラを抑制する。
【解決手段】 励磁コイル605A及び電流検知センサ900Aと励磁コイル605B及び電流検知センサ900Bとの間にスイッチ回路703を設け、CPU701はステッピングモータを回転駆動させるときスイッチ回路703をオフさせ、電流検知センサ900Aと電流検知センサ900Bの間の検知誤差を補正する補正値をもとめるときスイッチ回路703をオンさせ、励磁コイル605A、電流検知センサ900A、励磁コイル605B、及び電流検知センサ900Bに電流を流させる。
(もっと読む)
ミシン用ステッピングモータ制御装置及びミシン
【課題】ミシンに使用されるステッピングモータの消費電力を低減すること。
【解決手段】ミシン用ステッピングモータ制御装置1は、偏差生成部40と、駆動信号生成部41と、ゲイン調整部43と、を含む。偏差生成部40は、ステッピングモータ30に対する電流指令値Icとステッピングモータ30に流れる駆動電流値Idとの偏差dを求め、偏差dに所定のゲインGを与えた電流値偏差Dを生成する。駆動信号生成部41は、電流値偏差Dから駆動信号Sdを生成する。コイル34a、34bの自己誘導によって流れる電流をコイル34a、34b自体に還流するように駆動回路が制御される省電力制御が行われる場合において、駆動電流値Idの絶対値を減少させる必要があるときには、駆動電流値Idの絶対値を減少させる必要がないときよりもゲインGを大きくする。
(もっと読む)
ステッピングモータの駆動装置
【課題】制御系を複雑化することなく指令値に対する追従性を高める。
【解決手段】バイポーラ型2相ステッピングモータ1のコイル4,5に流れる電流値を検出する電流検出部11と、バイポーラ型2相ステッピングモータへの動作指令に基づくコイルへの指令電流値Irと電流検出部の検出電流値Idとの電流偏差Ieに基づいてコイルに流す電流のフィードバック制御を行う制御部30とを備え、制御部は、電流偏差の積算値Ieiを求め、当該積算値と電流偏差の値とによりコイルに流す電流値を決定すると共に、指令電流値の正負の極性が切り替わると電流偏差の積算値をリセットしてから積算を継続することを特徴とする。
(もっと読む)
モータ駆動回路
【課題】モータコイルを定電流駆動する際に、放射ノイズの影響を抑制する。
【解決手段】モータ駆動回路は、モータコイルが接続される一対のHブリッジ回路と、一対のHブリッジ回路の夫々のモータコイルに流れる電流を検出する電流検出回路と、所定周期の発振信号を出力する発振回路と、発振信号に基づいて所定周期ごとに一対のHブリッジ回路の夫々の第1ソーストランジスタ及び第2シンクトランジスタがオンし、電流検出回路の検出結果に基づいて、一方のHブリッジ回路のモータコイルに流れる電流値が所定値となった後、一方のHブリッジ回路の第2シンクトランジスタがオフし、他方のHブリッジ回路のモータコイルに流れる電流値が所定値となった後、他方のHブリッジ回路の第2シンクトランジスタがオフするよう一対のHブリッジ回路を制御する制御回路と、を備える
(もっと読む)
モータ駆動回路及び画像形成装置
【課題】ステッピングモータ90のモードに応じて基準電圧を細かく切替え、安定的に騒音や発熱を防止する。
【解決手段】ステッピングモータ90を制御するモータドライバ素子80であって、ステッピングモータ90を所定の回転方向及び所定の回転量で動作させる信号を発生させるCPU70と、ステッピングモータ90の所定の回転速度及び所定の回転速度で動作させるための第1の基準電圧の対応表を備えた基準電圧テーブル部と、第1の基準電圧をステッピングモータ90に出力するDAコンバータ74と、DAコンバータ74によって出力された電圧を検出して第2の基準電圧とするADコンバータ73を有している。電源投入時に基準電圧テーブル部が備えている第1の基準電圧をDAコンバータ74で出力してADコンバータ73で検出し、第2の基準電圧で第1の基準電圧を補正する。
(もっと読む)
ステッピングモータの制御方法および制御装置
【課題】ロータが初期位置に移動する際の騒音を抑制可能なステッピングモータの制御方法および制御装置を提供する。
【解決手段】制御装置10は、制御回路30および駆動回路40を備えている。制御回路30はCPU31、電流測定部32およびメモリ33を備えており、駆動回路40はモータ駆動部41および電流センシング部42を備えている。ステッピングモータ20の起動時、デューティ比が徐々に大きくなるPWM信号を駆動電圧としてコイルに印加する。よって、ホールド電流は線形に徐々に増加し、急激には増加しない。そのため、ロータが初期位置まで高速で移動することによる振動音あるいは衝撃音等の騒音を抑制できる。
(もっと読む)
モータ制御装置
【課題】エンコーダを用いることなく、ステッピングモータの脱調を精度よく検出することができるモータ制御装置を提供する。
【解決手段】モータ制御装置60は、ステッピングモータ70を駆動する電流を出力し、電流の位相を示すタイミング信号を出力するドライバ63と、ドライバ63がタイミング信号を出力する予め定められた時刻を示す目標出力時刻と、ドライバ63がタイミング信号を出力した時刻を示す実測出力時刻と、の差を算出する算出部65と、算出部65が算出した差が所定閾値以上であるか否かを判定し、当該差が所定閾値以上である場合、ステッピングモータ70が脱調したと判定する判定部66と、を備える。
(もっと読む)
ステッピングモータの回転子の位置及び速度を推定する方法及び装置
【課題】
ステッピングモータの低速でのマイクロステップ駆動と高速でのセンサレス駆動の両方において、ステッピングモータの回転子の位置及び速度を推定する。
【解決手段】
本発明の方法は、インバータ3からステッピングモータ1に供給されるモータ電流を電流検出器2が検出し、外部から入力されるパルス入力を電気角に変換し、電流検出器2により検出されたモータ電流と電気角とを2軸直流電流値に変換し、2軸直流電流値と外部からの電流指示値との偏差から2軸直流電圧指示値を算出し、2軸直流電圧指示値と予め求められ又は予め推定されたステッピングモータ1の回転子の速度とを用いて、モータ電流を磁束オブザーバ8が推定し、磁束オブザーバ8により推定されたモータ電流と2軸直流電流値との偏差から回転子の速度を推定し、推定された回転子の速度を積分して回転子の位置を推定する。
(もっと読む)
異常検知回路、負荷駆動装置、電気機器
【課題】モータ駆動装置では、特定のモータ駆動条件下において、定電流チョッピング機能や過電流保護機能が正常に働かず、モータの異常発熱や破損、或いは、モータ駆動装置の損傷に至るケースがあった。
【解決手段】異常検知回路50は、Hブリッジ回路10のシンク電流Irnfを監視し、所定時間にわたってシンク電流Irnfが検出されなければ異常と判断する。具体的に述べると、異常検知回路50は、所定周波数のクロックパルスS5を生成するクロックパルス生成部51と;クロックパルスS5の入力毎にカウント値がインクリメントされ、シンク電流Irnfが検出されたときに前記カウント値がリセットされ、前記カウント値がリセットされずに所定値に達したときに正常時論理レベルから異常時論理レベルとなる第1異常検知信号S6を生成するカウンタ52と;を有する。
(もっと読む)
二相ステッピングモータのマイクロステップ駆動方法
【課題】二相ステッピングモータの特性によらずに、二相ステッピングモータが低速駆動状態であるのか、中高速駆動状態であるのかを判定することができ、低速域での駆動制御や中高速域での駆動制御が行える二相ステッピングモータのマイクロステップ駆動方法を提供する。
【解決手段】モータコイルに流れる励磁電流のピーク値が、電気角が第1電気角D1°となるまでの間に、基準電流値に達した場合には、二相ステッピングモータ1は低速域にあるとして低速域における制御を行い、スイッチング周波数の変動による騒音を防止する。電気角が第1電気角D1°となるまでの間に、モータコイルに流れる励磁電流のピーク値が、基準電流値に達しなかった場合には、中高速域にあるとして中高速域における制御を行い、出力トルクがゼロとなってしまうのを防止し、基準電流値に基づいた駆動制御を行う。
(もっと読む)
ステッピングモータの駆動装置
【課題】ステッピングモータ軸の位置・速度を検出するセンサなしに、実際の負荷トルクに応じた電流制御を行って、脱調や振動を防止することができるステッピングモータの駆動装置を提供する。
【解決手段】ステッピングモータの駆動装置において、各相巻線を流れる各相電流の電流値を検出する電流検出部201、202と、各相巻線を流れる各相電流を定電流制御する定電流制御部300と、電流検出部の検出結果に基づき各相電流の零クロスを検出する零クロス検知部102a、102bと、駆動制御パルス信号のエッジを基準としてエッジ間周期を検出する周期測定部104と、駆動制御パルス信号のエッジと零クロス検知部により検知された零クロスとの間の位相差を検知する位相差検知部105と、エッジ間周期に対する位相差の比である位相差比とステッピングモータの駆動周波数とに応じた電流値で定電流制御部に定電流制御を行わせる制御装置106とを備えた。
(もっと読む)
1 - 20 / 120
[ Back to top ]