
Fターム[5H680AA06]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 目的、効果 (1,903) | 高効率化 (351)
Fターム[5H680AA06]に分類される特許
341 - 351 / 351
振動体及び振動型駆動装置
【課題】 主に振動減衰を抑制することのできる振動体を提供する。
【解決手段】 相互に接触する複数の弾性体(2、3)と、電気信号が供給されることにより弾性体に振動を励起する電気−機械エネルギ変換素子(4)とを有し、複数の弾性体間の隙間に、樹脂材料が設けられている。
(もっと読む)
液体移送装置

【課題】 圧電アクチュエータの圧電層及び振動板を効率よく変形させることが可能なインクジェットヘッドを提供すること。
【解決手段】 圧電アクチュエータ3は、複数の圧力室14に夫々対応する複数の個別電極32、及び、これら複数の個別電極32に対向する振動板30と、複数の個別電極32と振動板30との間に挟まれて、複数の圧力室14に跨って連続的に形成された圧電層31とを有し、圧力室14が形成され且つ個別電極32と重ならない領域に、この領域における圧電アクチュエータ3の剛性を低下させる絶縁材料層34(剛性低下部)が設けられている
(もっと読む)
圧電アクチュエータ
【課題】配線時や駆動時における、配線のはがれ、接触不良および電極の溶解を防止でき、かつ、安定的に駆動することができる圧電アクチュエータを提供すること。
【解決手段】補強板21および圧電素子22を有し、圧電素子22に交流電圧を印加することにより駆動されて振動する振動体2と、補強板21に設けられ、振動体2の振動により被駆動体Rに接触して被駆動体Rに駆動力を伝達する接触部3と、圧電素子22の表面に設けられ、圧電素子22に交流電圧を印加する駆動電極12、13と、圧電素子22の表面に設けられ、振動体2の振動時にて圧電素子22に誘起される電圧を検出する検出電極11、14とを備えた圧電アクチュエータ1であって、駆動電極12、13および検出電極11、14は、それぞれ、その一部に、残部より厚みの厚い導通部51〜54、61、62を有することを特徴とする。
(もっと読む)
液体移送装置
【課題】 弾性表面波による液体移送装置であって、より低電圧で液体を移送できる液体移送装置を提供する。
【解決手段】 圧電性基板23表面上の液体13を弾性表面波によって移送する液体移送装置1に、液体13が移送される液体移送部12と、液体移送部12に存在する液体13を移送するために液体移送方向と同方向に進行する弾性表面波を圧電性基板23表面に励振する一方向性弾性表面波励振部32と、圧電性基板23表面に励振された弾性表面波の一部を電気エネルギーに変換し、該変換した電気エネルギーを用いて圧電性基板23表面に液体移送部12に存在する液体13を移送するために液体移送方向と同方向に進行する弾性表面波を励振させてエネルギーを還流するエネルギー還流部30とを設けた。
(もっと読む)
超音波モータ
【課題】円環構造を有し、モータ効率が改善され、配置スペ−スの制約も少ない超音波モータを提供する。
【解決手段】本超音波モータ40は、レンズ鏡筒の駆動源として組み込まれ、ステータ15と、環状のロータ16と、一対の振動子41と、振動子41を支持する振動子ホルダ22と、振動子41の支持軸46を支持する振動子押さえ23と、振動子押さえ23を介して摺動自在に振動子をロータ側に付勢する押さえバネ24と、ステータ15とロータ16の嵌合部に転動可能に挿入されるボール21とを有してなり、一対の振動子41は、ステータ15の凹部15bに振動子ホルダ22等を介して装着されており、振動子41の駆動子44は、ロータ16の外周面と内周面とを常時押圧する状態で挟持している。振動子41が励起され、駆動子44が楕円振動を行うと、ロータ16が回転駆動される。
(もっと読む)
積層電気−機械エネルギー変換素子及び振動波駆動装置
【課題】 小型化且つ高出力化できると共にモ−タ効率を向上させることができる積層電気−機械エネルギー変換素子及び振動波駆動装置を提供する。
【解決手段】 振動波モータ50は、振動子52及び回転部53を備え、振動子52は、金属の弾性体54と、円形状圧電層1〜11から成る積層圧電素子55と、金属の弾性体57と、弾性体54と協働して積層圧電素子55及び弾性体57を挟持する金属の弾性体58とから成る。圧電層2〜11のうち偶数番目の層の圧電層の第1層側の面には、内部電極A+,B+,A−,B−が設けられ、一方、圧電層2〜11のうち奇数番目の層の圧電層の第1層側の面には、内部電AG+,BG+,AG−,BG−が設けられている。これらの内部電極は、積層圧電素子55の内部の発生すべき歪に応じて、圧電層7〜11までの内部電極に比べて、圧電層5,6の内部電極の外径は小さく、圧電層2〜4の内部電極は外径がさらに小さくなっている。
(もっと読む)
圧電超音波モーター
【課題】圧電超音波モーターの励起電圧の低下、機械的出力および信頼性の増加、モーター設計の単純化、製造コストの低減、およびモーターの構造的な取り扱いの改善を達成すること。
【解決手段】本発明は、長さLおよび高さHの圧電プレートの形の振動子、ならびに振動子に配置され、動かすべき部分の摩擦表面に対して弾性的に押し圧された1個または2個の摩擦要素を備える圧電超音波モーターに関する。本発明によれば、圧電プレートはより大きな表面に縦に展延する区画面によって2個の同一部分に分割され、これらの部分の少なくとも1個は非対称音響定在波の非対称的な発生器を含み、その起動によって非対称的な2次元定在波を発生するので、圧電プレートの長い端部面の中心に配置された摩擦要素は分割面に対して同一の傾きで運動を行い、動かすべき要素に運動エネルギーが伝達される。
(もっと読む)
圧電アクチュエータ駆動装置、電子機器、その駆動方法、その駆動制御プログラム、そのプログラムを記録した記録媒体
電源と、圧電アクチュエータAと、この圧電アクチュエータの駆動を制御する駆動制御装置100とを備えた電子機器において、駆動制御装置100は、駆動信号SDRを振動体12の圧電素子に供給する駆動回路111と、振動体12の振動状態を表す位相差を検出する位相差検出手段120と、振動状態の目標となる目標位相差を補正する比較電圧設定回路133と、位相差と目標位相差とを比較する駆動周波数設定手段140とを備え、比較結果に基づいて位相差が目標位相差に近づくように駆動信号SDRの駆動周波数を変更させことで、駆動電圧に依存せず、高効率な圧電アクチュエータAの駆動が実現できる。 (もっと読む)
駆動制御装置、電子機器、電子機器の駆動制御方法、電子機器の駆動制御プログラム、記録媒体
電池200と圧電アクチュエータAとを備えた電子機器1において、駆動開始前の電源電圧をサンプルホールド回路102で保持し、この電源電圧に基づいて基準電圧発生回路103で基準電圧を設定し、制御回路106は、第2比較回路105の比較で電源電圧が駆動停止電圧を下回った場合に駆動停止させ、第1比較回路104の比較で電源電圧が基準電圧を上回った場合に圧電アクチュエータAの駆動を再開させる。従って、電池電圧の状況に対応した間欠駆動により、小さな電源を用いて機器の小型化を促進でき、かつ駆動時間の短縮化を十分に図ることができる。 (もっと読む)
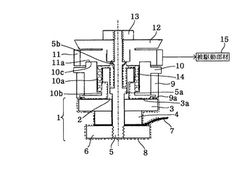
圧電駆動ユニット、及び、そのような駆動ユニットの特に回転駆動運動を生成する方法
本発明は、圧電駆動ユニット、及び、そのような駆動ユニットの特に回転駆動運動を生成する方法に関するものである。駆動ユニットは、ステータ(1)と、ステータに対して回転軸(11)を中心として回転可能に配置されたロータ(2)と、特に複数の圧電アクチュエータの形態の駆動部材とを備えている。本発明によれば、さらに駆動ユニットは、前記ステータ(1)と前記ロータ(2)との相互に対向する表面の間に形成され、流動媒体(10)により充填される環状間隙(4’)と、前記間隙に接して配置された複数の圧電アクチュエータ(8a−8f)とを備え、前記圧電アクチュエータは、所定の図式(スキーマ)又は所定の関数に従って電気的に励起されたときに実質的に半径方向の長さ変化を前記間隙(4’)の方向に行い、それにより、放出される前記アクチュエータの機械エネルギが流動エネルギとして流動媒体に伝達されるようになっており、流動媒体の流動エネルギが前記ロータに伝達されて、前記ロータ(2)の回転駆動運動に変換される。 (もっと読む)
平らに共振する電気機械的駆動ユニット
【課題】電気機械的モータ(1)は、移動させるべき本体(10)の駆動面(14)にほぼ平行に伸びる2つの電気機械的部分(32、34)から構成される駆動素子(30)を備えている。電気機械的部分(32、34)は、固定子(20)の支持体部分(22)の第1の端部(38)に剛性的に支持される。本体(10)の駆動面(14)との相互動作によって本体(10)を移動させる、単一の作動部分(42)を有するリンク部分(40)は、電気機械的部分(32、34)のそれぞれの第2の端部(36)の間に取り付けられる。電気機械的部分(32、34)は移動方向(12)にほぼ垂直なストロークを有する振動モードで励振することができる。リンク(40)の一部またはリンク部分(40)および電気機械的部分(32、34)の間の結合部(46、54)は、ストロークの方向に電気機械的部分(32、34)の自体の曲げ剛性よりも著しく低い曲げ剛性を有している。 (もっと読む)
341 - 351 / 351
[ Back to top ]