
Fターム[5H680BB15]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 種類、型式 (3,145) | 円筒型 (206)
Fターム[5H680BB15]に分類される特許
1 - 20 / 206
超音波モータ
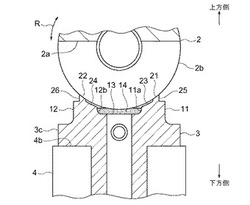
【課題】移動子と固定子との接触面積が摩耗の進行に伴って増大することを抑制し、駆動力の変動を小さくすることを実現した超音波モータを提供することを目的とする。
【解決手段】超音波モータ1のロータ2がステータ3の一対の支持部11、12に加圧接触されている。支持部11、12の上部には、ロータ2の外周面2bの形状に沿って接触面21、22がそれぞれ形成されている。接触面21に段差部23、25が形成されるとともに、接触面22に段差部24、25が形成されることにより、ロータ2とステータ3との接触距離が規制される。
(もっと読む)
モータ装置、制御プロファイル生成方法、制御プロファイル生成装置、及びロボット装置

【課題】回転子を高精度に制御する。
【解決手段】回転子と、回転子の少なくとも一部に掛けられる伝達部と、伝達部に接続され、伝達部を移動させる駆動部と、回転子と伝達部との間を回転力伝達状態にして前記伝達部を移動させる駆動動作と、回転子と伝達部との間を回転力非伝達状態にして伝達部を所定の位置に戻す復帰動作とを駆動部に行わせる制御部とを備え、駆動動作を行う駆動期間は、少なくとも初期駆動期間及び主駆動期間を含み、制御部は、初期駆動期間における初期駆動動作と主駆動期間における主駆動動作とを前記駆動部に行わせる。
(もっと読む)
超音波モータ及びそれを有するレンズ装置
【課題】 超音波モータにおいて、振動子の押圧力の調節機構は構成部品が多く複雑であり、また、ほんのわずかな調整で振動子対する押圧力が大きく変化してしまうため繊細な調整が必要であった。
【解決手段】 超音波モータは、被駆動部と接触する接触面を有し、圧電素子が固定された振動子であって、前記圧電素子によって励振された超音波振動によって前記被駆動部を駆動する振動子と、固定部に支持され、前記接触面を前記被駆動部に押圧するように、前記振動子に付勢力を付与する加圧手段とを有する超音波モータであって、前記加圧手段は、前記接触面に対し垂直な方向に移動可能である一方、前記接触面に対し平行な方向への移動が規制されるよう当該固定部に保持された加圧部材と、当該加圧部材を介して前記振動子に当該接触面に対し垂直な方向の押圧力を付与する弾性部材とを備える構成とした。
(もっと読む)
振動型駆動装置の制御方法
【課題】複数個の振動波モータの駆動力を合成して被駆動部材に伝達する際に、振動波モータに生じる滑りの発生を抑制し、振動波モータのトルクを効率的に伝達することが可能となる振動型駆動装置の制御方法を提供する。
【解決手段】複数個の振動波モータからの駆動力を合成して被駆動部材に伝達するように構成された振動型駆動装置の制御方法であって、
振動体の摺動面の摩擦力と、前記複数個の振動波モータのトルクの総和を、複数個の振動波モータの個数で割った値と、
個々のモータの中における最小摩擦力を有するモータの該最小摩擦力から得られるトルクとの差の値が、
個々のモータの中における最小摩擦力を有するモータの該最小摩擦力を超えないように制御し、振動体の摺動面における移動体の滑りを抑制する。
(もっと読む)
駆動装置、及び、駆動方法
【課題】 圧電アクチュエーターを用いた駆動装置の起動時において、起動時間のばらつきの少ない安定した起動を実現する。
【解決手段】 信号が印加されることによって振動する素子を有する振動部と、前記素子の振動により駆動される被駆動体と、前記素子を振動させる第1の信号、及び、前記第1の信号よりも高い周波数を有する第2の信号を生成する信号生成部と、を備える駆動装置であって、前記被駆動体と前記振動部とが接触した状態において、前記第1の信号を前記素子に印加することと、前記第2の信号を所定時間だけ前記素子に印加することと、によって、前記被駆動体の駆動を開始する。
(もっと読む)
圧電アクチュエーター、及び、圧電アクチュエーターの駆動方法
【課題】エネルギー効率の改善及び構成の簡素化を図る。
【解決手段】圧電素子を有し、駆動信号が圧電素子に供給されることによって振動する振動体であって、長辺方向の長さと短辺方向の長さとの比が略n対1(nは2以上の整数)の矩形の平面形状の振動体と、振動体に設けられた当接部であって、振動体の振動に応じて被駆動体に当接する当接部と、を備え、振動体を第1周波数で矩形の長辺方向へ伸縮させる第1振動、及び、振動体を第1周波数とは異なる第2周波数で矩形の短辺方向へ伸縮させる第2振動、を駆動信号によって発生し、第1振動及び第2振動に基づいて、当接部を被駆動体に当接させて被駆動体を駆動する。
(もっと読む)
振動型モータの駆動装置およびその駆動方法
【課題】振動子と接触子との間の摩耗の進行により振動型モータの駆動特性が変化しても振動型モータを安定的に駆動する。
【解決手段】駆動装置は、振動型モータ206の駆動速度を検出する速度検出手段208と、駆動速度が所定速度になるように周波電圧の周波数を制御する周波数制御手段210と、第1の時点において駆動速度を所定速度とする周波電圧の周波数である第1の周波数を記憶する記憶手段213と、第1の時点よりも後の第2の時点において駆動速度を所定速度とする周波電圧の周波数である第2の周波数を取得し、該第2の周波数と第1の周波数を用いて設定された参照周波数との差に応じて周波電圧の振幅を制御する振幅制御手段212とを有する。
(もっと読む)
圧電アクチュエーター、ロボットハンド、及びロボット
【課題】ローターの回転速度の変動を抑えて安定した回転を得ることができる圧電アクチュエーターを実現する。
【解決手段】圧電アクチュエーター100は、圧電素子11を含む振動体1と、円盤形状を有するローター2と、振動体1の一端から突出しローター2に当接する摺動部15と、圧電素子11に駆動信号を供給する駆動制御部5とを備え、駆動制御部5は、予め取得した駆動開始からの時間経過に伴うローター2の回転速度の目標値に対する差異の変化に基づいて、駆動信号の周波数を変化させて回転速度を制御する。
(もっと読む)
モーター、ロボットハンドおよびロボット
【課題】被駆動手段からのアクチュエーターへの反力が、アクチュエーターの振動の被駆動手段の駆動力への変換の障害とならない付勢手段によって、効率の良いモーターを提供する。
【解決手段】円柱状の回転面を有する被駆動手段と、前記被駆動手段の前記回転面に付勢する突起を端部に有する振動板と、前記振動板に積層される圧電体と、を有するアクチュエーターと、前記アクチュエーターを前記被駆動手段に付勢する付勢手段と、を備え、前記被駆動手段の前記回転面と前記突起が接する接点を接点P、前記アクチュエーターに前記付勢手段による付勢力が作用する作用点を作用点Q、とした場合、前記回転面に対する前記突起の摩擦係数がμである場合、前記付勢手段の付勢方向と、前記接点Pと前記作用点Qを結ぶ方向と、でなす角度θは、θ>tan-1μ、であるモーター。
(もっと読む)
圧電アクチュエーター、ロボットハンド、及びロボット
【課題】安定した状態で確実に起動し安定駆動状態を維持することができる圧電アクチュエーターを実現する。
【解決手段】圧電アクチュエーター100は、圧電素子11を含む振動体1と、振動体1に設けられローター2に当接する摺動部15と、圧電素子11に駆動信号を供給する駆動回路26と、駆動信号と振動体1の振動に基づいて検出される検出信号との位相差を検出する位相差検出回路27と、駆動信号の周波数及び電力を制御する周波数制御器20とを備え、周波数制御器20は、周波数を変化させて、位相差が所定の範囲内となった場合に電圧を上限電圧値に設定し、位相差が所定の範囲外にある場合には電圧を上限電圧値よりも小さい下限電圧値に設定することを特徴とする。
(もっと読む)
モーター、ロボットハンドおよびロボット
【課題】被駆動手段からのアクチュエーターへの反力が、アクチュエーターの振動の被駆動手段の駆動力への変換の障害とならない付勢手段によって、効率の良いモーターを提供する。
【解決手段】円柱状の被駆動手段と、前記被駆動手段に付勢する突起を端部に有するアクチュエーターと、前記アクチュエーターを前記被駆動手段に付勢する付勢手段と、を備えるモーターであって、前記アクチュエーターの振動によって描かれる前記突起の楕円軌跡を、前記回転面と接するように配置し、前記楕円軌跡と前記回転面との接点を接点P、前記付勢手段による付勢力が作用する作用点を作用点Q、前記被駆動手段の回転中心を回転中心R、とした場合、前記付勢手段の付勢方向と、前記回転中心Rと前記接点Pとを結ぶ方向と、でなす角度θ1と、前記付勢手段の付勢方向と、前記接点Pと前記作用点Qを結ぶ方向と、でなす角度θ2と、は、θ1<θ2であることを特徴とする。
(もっと読む)
超音波モータ
【課題】簡略な構成を実現し、且つ、高トルクを得られるように駆動した場合でも摩擦接触子の磨耗が促進されにくい超音波モータを提供すること。
【解決手段】縦振動及び捻れ振動する圧電素子を利用する超音波モータを次のように構成する。ロータ機構部13を挟持するように縦振動の方向に沿って直列に配設された第1積層圧電素子40-1及び第2積層圧電素子40-2と、第1積層圧電素子40-1に設けられた摩擦接触子41-1と、第2積層圧電素子40-2に設けられた摩擦接触子41-2と、第1積層圧電素子40-1においてロータ機構部13の回転軸の延長上に設けられた位置決めピン43-1と、第2積層圧電素子40-2においてロータ機構部13の回転軸の延長上に設けられた位置決めピン43-2と、位置決めピン43-1,43-2が挿入される軸受け13bを備えており回転駆動されるロータ機構部13と、を超音波モータに具備させる。
(もっと読む)
振動波モータ
【課題】振動波モータの駆動に伴って発生する不要な振動を抑制すると共に、制御性能の向上を図ることが可能となる振動波モータを提供する。
【解決手段】電気−機械エネルギー変換素子に電圧を印加することにより振動する振動体と、
振動体と加圧接触し、振動体により摩擦駆動される移動体と、
振動体と移動体とを加圧接触させる加圧部材と、
を有する振動波モータであって、
移動体と加圧部材との間に設けられ、振動波モータの駆動中に発生する不要な振動を抑制するための振動減衰部材と、
移動体と加圧部材との間に設けられ、移動体の駆動力を加圧部材に伝達するための駆動力伝達部材と、
を備え、
駆動伝達部材は、振動減衰部材の摩擦力を利用せずに、移動体と加圧部材とを一体的に駆動する。
(もっと読む)
超音波アクチュエータ
【課題】小型でありながら強い発生力を有し、動作効率の良く、かつ設計の自由度が多いリニア型超音波アクチュエータを提供すること。
【解決手段】厚み方向に分極された第1圧電体、第1圧電体と対向するように配置され、厚み方向に分極された第2圧電体、及び、第1圧電体と第2圧電体を挟持する第1弾性体と第2弾性体を有し、第1弾性体と第2弾性体による挟持方向に伸縮する駆動部と、駆動部に対して移動可能に配置された移動体と、駆動部に結合され、移動体に対する把持力を調整可能に構成された伝達部と、駆動部の伸縮と伝達部の把持力調整を連動させる制御部と、を備え、伝達部は、移動体を挿通するための貫通孔を有している。
(もっと読む)
アクチュエータ及びアクチュエータの駆動方法
【課題】構成が簡易でかつ簡単な制御で駆動できるアクチュエータを提供する。
【解決手段】アクチュエータ(2)は、ずり圧電性材料で構成された薄膜(16)と、薄膜(16)の第1の主面に形成された第1の電極と、薄膜(16)の第2の主面に形成された第2の電極を備え、第1の電極と第2の電極間に所定の交流電圧を印加することで薄膜(16)の少なくとも一の端縁部において駆動力を発生させることを特徴とする。
(もっと読む)
超音波モータ
【課題】組み立て容易性が良好な超音波モータを提供すること。
【解決手段】中心軸に垂直な断面が矩形状を呈し、該矩形状を構成する短辺と長辺との比率が所定の値に設定され、前記中心軸方向に伸縮する縦振動と、前記中心軸を捻れ軸とする捻れ振動と、が同時に励起されることで楕円振動が励起される積層圧電素子40を具備する超音波モータを、次のように構成する。積層圧電素子40のうち捻れ軸の延長上に軸状部材である押圧軸22aを設ける。また、フレーム31のうち積層圧電素子40の捻れ軸の延長上の位置に、押圧軸22aが挿入される孔部を設ける。さらに、積層圧電素子40のうちロータ機構部10の回転軸の延長上に位置決めピン43を設ける。そして、ロータ機構部10のうち回転軸上であって積層圧電素子40に対向する面に、位置決めピン43が挿入される位置決め孔部14h,15hを設ける。
(もっと読む)
圧電アクチュエータ、レンズ鏡筒、及び撮像装置
【課題】圧電素子によって駆動される部材の異なる2つの方向への振動を、独立して制御することができ、異なる2つの方向へ効率よく振動させる圧電アクチュエータを提供する。
【解決手段】圧電アクチュエータ(1)は、第1の方向に沿って厚みすべり振動をする第1圧電素子(6)と、第1圧電素子(6)により駆動され、第1の方向に沿って振動する第1部材(3b)と、第1部材(3b)に支持され、第2の方向に沿って厚みすべり振動をする第2圧電素子(7)と、第2圧電素子(7)により駆動され、第2の方向に沿って振動する第2部材(3a)と、第2部材(3a)によって駆動される被駆動体(4)と第2部材(3a)との間に圧力を生成する加圧部(8)とを備える。加圧部(8)は、被駆動体(4)と第2部材(3a)との間の圧力を、被駆動体(4)の駆動状態に応じて変更する第3圧電素子(81)を備える。
(もっと読む)
振動アクチュエータ、レンズ鏡筒及びカメラ
【課題】静音化が可能な振動アクチュエータ及びカメラを提供する。
【解決手段】本発明の振動アクチュエータ10は、電気機械変換素子112により振動波を生じるとともに、固定部材13に支持される支持部111cを有する振動子11と、前記振動子11に加圧接触され、前記振動波によって駆動される移動子12と、前記振動子11及び前記移動子12の周囲を覆う防音カバー310と、前記支持部111cと前記固定部材13との間に介在する振動減衰部材320と、を備えること、を特徴とする。
(もっと読む)
超音波モータ
【課題】構成が簡素で、容易に組み立てることができる超音波モータを提供すること。
【解決手段】超音波モータ10は、圧電素子13と保持部材15と駆動子17とによって1つのユニットとして組み立てられる振動子11と、駆動子17と接触し、駆動子17から駆動力を伝達されて、楕円振動発生面の平面方向に直交する方向における軸である回転軸17aを中心軸として、駆動する駆動するロータ19と、振動子11を位置決めする位置決め溝33を有し、振動子11を収容するケース部材31と、ケース部材31に収容された駆動子17をロータ19に向けて押圧する押圧部材37と、ロータ19を回転可能に支持するロータ支持部材であるベアリング73とを具備する。またロータ19を貫通し、ロータ19の回転中心となる中心軸(回転軸)17aと、駆動子17とが、一体的に成型されている。
(もっと読む)
振動型アクチュエータの制御装置及び制御方法
【課題】 ロータの回転方向を切り替える際、ロータの速度変動や可聴音が生じる可能性があった。
【解決手段】 本発明の振動型アクチュエータの制御装置は、第1の交流電圧を振動体に印加することによって前記振動体の接触部に生成する第1の楕円運動と、第2の交流電圧を前記振動体に印加することによって前記接触部に生成する、前記第1の楕円運動とは異なる向きに回転する第2の楕円運動と、の合成によって、前記振動体と前記振動体の接触部に接触する移動体とを相対移動させる。そして、前記第1の交流電圧と前記第2の交流電圧とを前記振動体に印加する電圧供給手段を有し、前記電圧供給手段は、前記相対移動の速度指令に応じて前記第1の楕円運動の振幅と前記第2の楕円運動の振幅との差を変化させるように、前記第1の交流電圧の振幅と前記第2の交流電圧の振幅とを夫々変化させることを特徴とする。
(もっと読む)
1 - 20 / 206
[ Back to top ]