
Fターム[5J070AE01]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 自動車 (1,037)
Fターム[5J070AE01]に分類される特許
1 - 20 / 1,037
踏切障害物検知装置
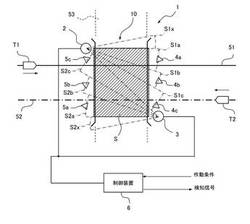
【課題】検知領域に隣接する非検知領域に送信されたサイドローブの反射波による誤検知を抑制し、踏切道内における障害物の有無を安定して検知することのできる踏切障害物検知装置を提供する。
【解決手段】踏切障害物検知装置1は、踏切道10に設定された検知領域S(S1a〜S1c,S2a〜S2c)及びこれに隣接する非検知領域(S1x,S2x)に電波を送信するとともに、送信した電波の反射波を受信する送受信機2,3を含む。そして、踏切障害物検知装置1は、検知領域である領域S1a、S2aに送信された電波の反射波である第1の反射波と、非検知領域S1x,S2xに送信された電波の反射波である第2の反射波との両方に基づいて、検知領域Sである領域S1a,S2aにおける障害物の有無を判定する。
(もっと読む)
物体検知装置

【課題】前方に位置する物体を検知する機能に加えて、降雨状態を検知する機能を有し、この機能にかかる降雨状態の検知精度を向上させた物体検知装置を提供する。
【解決手段】雨滴検知用PD41は、視野制限部材50により、反射光を受光する検知視野が第1の物体検知用PD42、および第2の物体検知用PD43の検知視野と異なる領域に制限されている。雨滴検知用PD41は、雨滴検知領域における、雨滴からの反射光を受光する。第1の物体検知用PD42、および第2の物体検知用PD43は、物体からの反射光を受光する。
(もっと読む)
周辺物体検出装置
【課題】レーダセンサを利用した周辺物体検出において検出性能を向上させる周辺物体検出装置を提供することを課題とする。
【解決手段】レーダセンサを利用し、車両周辺の周辺物体の過去の検出結果と今回の検出結果に基づいて周辺物体を検出する周辺物体検出装置であって、レーダセンサによるセンサ情報に基づいて周辺物体を検知した方向と周辺物体を検知しなかった方向の情報(例えば、周辺物体の存在確率)を取得し、各方向の情報に対して信頼度(例えば、遮蔽由来信頼度)を付与し、各方向の情報と付与した各信頼度に基づいて周辺物体の情報を検出し、特に、周辺物体を検知しなかった方向の情報に付与する信頼度を周辺物体を検知した方向の情報に付与する信頼度よりも低い信頼度とすることを特徴とする。
(もっと読む)
車載用のレーダ装置、車載用のレーダ方法および車載用のレーダプログラム
【課題】方位検出範囲の内に存在する対象物が検出されているのか否かを判定することができる車載用のレーダ装置を提供する。
【解決手段】車載用のレーダ装置は、整数倍の関係にない2種類以上の平均ピッチの受信アレーアンテナを実現する複数の受信アンテナと、前記2種類以上の平均ピッチの受信アレーアンテナのそれぞれによる受信信号に基づいて前記対象物の方位を検出する方位検出処理を行い、検出された前記対象物の方位が一致すると判定した場合には当該検出された前記対象物の方位は正しいと判定し、検出された前記対象物の方位が不一致であると判定した場合には当該検出された前記対象物の方位は正しくないと判定する方位検出部と、を備えることを特徴とする。
(もっと読む)
車両用歩行者検知装置、車両用歩行者保護システム
【課題】歩行者をより確実に追尾することが可能な車両用歩行者検知装置等を提供すること。
【解決手段】車両に搭載される車両用歩行者検知装置であって、車両周辺に放射した電磁波が障害物で反射されて前記車両に帰還した反射波を受信する受信手段と、前記受信手段が受信した反射波のデータを格納する記憶手段と、前記記憶手段に格納された反射波のデータを参照して前記反射波の強度の分散を算出し、該算出した反射波の強度の分散が基準値以上である場合に前記障害物が歩行者であると判別し、前記障害物が歩行者であると判別した後、同一の障害物を歩行者とみなして該歩行者の位置に関する情報を出力する制御手段と、を備える車両用歩行者検知装置。
(もっと読む)
電磁波透過用金属被膜、電磁波透過用金属被膜の製造方法及び車載用レーダ装置用のレドーム
【課題】本件発明の課題は、量産性が高く、電磁波の透過減衰率の極めて低い電磁波透過用金属被膜、当該電磁波透過用金属被膜の製造方法、及び当該金属被膜を用いた車載用レーダ装置用のレドームを提供することにある。
【解決手段】上記課題を解決するため、基材の表面に無電解めっき工程を経て設けられた、単位面積(1mm2)当たり10000個を超える微細金属領域から成る金属被膜であって、互いに隣接する微細金属領域が電気的に隔離されていることを特徴とする電磁波透過用金属被膜、当該電磁波透過用金属被膜の製造方法、及び当該金属被膜を用いた車載用レーダ装置用のレドームを提供する。
(もっと読む)
FMCWレーダ装置
【課題】広い距離範囲に渡って複数のターゲットを検出し、検出した各ターゲットまでの距離および相対速度の測定が可能であるFMCWレーダ装置を提供する。
【解決手段】複数の距離範囲観測期間を設定する手段(101)と、距離範囲観測期間ごとで異なる複数の変調周波数幅を設定する手段(101)と、送信信号と受信信号から距離範囲観測期間ごとにビート信号を生成する手段(107)と、生成されたビート信号の通過帯域幅を設定する手段(109、111)と、通過帯域幅設定手段を通過するビート信号を増幅する手段(110、112)と、増幅されたビート信号をデジタルデータに変換する手段(113)と、距離範囲観測期間ごとに通過帯域幅設定手段および増幅手段を切り替える手段(108a、108b)を備える。
(もっと読む)
車両検出装置、通信装置、および、車両検出システム
【課題】車両までの距離の検出精度を向上させる。
【解決手段】車両用通信装置112は、送信強度が異なる複数の距離検出用信号を送信する送信部133、携帯機111からの指令を受信する受信部131、携帯機111からの指令に基づいて、距離検出用信号の送信強度を調整する送信制御部132を備える。携帯機111は、各距離検出用信号を受信する受信部123、各距離検出用信号の受信強度を検出する受信強度検出部124、受信強度が有効範囲内にあるかどうかを判定する有効信号判定部125、受信強度が有効範囲外である距離検出用信号の送信強度の調整を指令する送信強度指令部126、受信強度が有効範囲内である2以上の距離検出用信号の受信強度に基づいて、車両までの距離を検出する距離検出部127を備える。本発明は、例えば、カーファインダシステムに適用できる。
(もっと読む)
車載レーダ装置および車載レーダ装置の制御方法
【課題】環境の変化によらず、対象物を正確に検出する。
【解決手段】車両の周囲の対象物を検出する車載レーダ装置10において、車両の周囲に信号を送信し、対象物によって反射された反射信号に基づいて車両の周囲の対象物を検出する検出手段(演算制御部10a、送信部10b、増幅部10c、送信アンテナ10d、受信アンテナ10e、増幅部10f、受信部10g)と、通信網を介して車両の周辺の状況を示す周辺情報を取得する取得手段(広域通信部10h)と、取得手段によって取得された周辺情報に基づいて、検出手段の検出精度の低下を抑制するように検出手段を制御する制御手段(演算制御部10a)と、を有する。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】本発明は、目標物が存在する可能性のある区域を精度よく推定する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲を一定の区域からなるメッシュに区切り、管理するメッシュ管理部と、探知した目標物の情報を有する探知情報を用いて、目標物の存在するメッシュを決定し、時間経過に応じて目標物の存在する目標存在メッシュを推定する目標推定部と、目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、目標存在メッシュを更新する同一化判定部と、目標物がない地域を示す否定情報を受信すると、地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する反映部と、を備えることを特徴とする目標管理装置である。
(もっと読む)
レーダ装置、および、物体導出方法
【課題】レーダ装置の部品点数の増加を防止し、発熱を抑制する技術を提供する。
【解決手段】
所定周期の第1送信波および第2送信波と、第1送信波が物体に反射した第1反射および第2送信波が物体に反射した第2反射波とに基づき、一の信号処理周期で物体に係る検知点を導出する。そして、所定条件を満たした場合に、所定周期よりも長い特定周期に変更した第1送信波、および、第1反射波に基づき一の信号処理周期で検知点を導出し、特定周期に変更した第2送信波、および、第2反射波に基づき、次の信号処理周期で検知点を導出する。これにより、物体の角度の導出処理をほとんど遅延させることなく、レーダ装置の発熱を抑制できる。
(もっと読む)
等価時間サンプリング装置、オシロスコープ、レーダ装置、および、等価時間サンプリング方法
【課題】一部に時間的に変化する領域を含む対象信号を正確にサンプリングすること。
【解決手段】周期性を有する対象信号を等価時間サンプリング方式に基づいてサンプリングする等価時間サンプリング装置1において、対象信号の周期に対応する一定期間に亘って対象信号を所定の間隔でサンプリングするとともに、当該一定期間のサンプリングをフィールドとした場合に、当該フィールドを複数回実行するサンプリング手段(サンプリング部2)と、対象信号において変化する領域を検出する検出手段(制御部3)と、検出手段の検出結果に基づいて、サンプリング手段を制御し、変化する領域に対応するフィールドの開始のタイミングを調整する調整手段(調整部5)と、を有することを特徴とする。
(もっと読む)
レーダ装置
【課題】アンテナに供給する高周波信号が減衰せず、かつ高周波信号のリークも生じることがないこと。
【解決手段】レーダ装置は、対象物を検出するための各ビームをそれぞれ送信する複数のアンテナと、複数のアンテナから各ビームを送信するための複数のモードの高周波信号を切り替えて発振する発振器と、発振器により発振された各モードの高周波信号をそれぞれ増幅して対応する複数のアンテナにそれぞれ供給する複数の増幅器と、複数の増幅器の各入力側にそれぞれ接続された複数の可変減衰器と、発振器により発振される各モードに応じて複数の増幅器の動作をそれぞれオン又はオフに切り替えると共に、複数の可変減衰器の減衰量をそれぞれ制御する切替制御回路とを具備する。
(もっと読む)
レーダ装置およびレーダ装置の性能低下判定方法
【課題】短時間で高精度な性能低下判定処理を実現することができるレーダ装置およびレーダ装置の性能低下判定方法を得る。
【解決手段】レーダ装置1の検知性能に関する性能低下判定処理を実施する性能低下判定部50は、測定部40で得られた測定結果を加工して、加工済反射物体を生成する測定結果加工部51と、相対距離の範囲と方位角度の範囲とによって形成されるエリア毎に、加工済反射物体の反射波レベルの代表値を計算し、エリア毎反射波レベル代表値を算出するエリア毎反射波レベル代表値計算部52と、エリア毎に、エリア毎反射波レベル代表値とエリア毎反射波レベル代表値閾値とを比較して、エリア毎性能低下度を算出するエリア毎性能低下度計算部53と、各エリアについて、エリア毎性能低下度を組み合わせて性能低下判定結果を出力するエリア毎性能低下度組合せ判定部54とを有する。
(もっと読む)
物体検出装置および車両制御装置
【課題】自車に対する先々行車を正確に検出することができる物体検出装置の提供。
【解決手段】レーダ波の送出により、上記自車に対する上記物体の左右方向角度および上下方向角度、並びに上記自車から上記物体までの距離を含むレーダ情報を取得するレーダ情報取得手段と、上記レーダ情報に基づいて物体を認識する物体認識手段とを備え、上記レーダ情報取得手段によって左右方向が同一で上記自車からの距離が異なる複数の上記レーダ情報が取得され、かつ、当該複数のレーダ情報のうち上記自車から最も近い物体以外の他の物体の上記上下方向角度または当該角度に基づく上下方向位置が予め定められた条件を満たす場合、上記物体認識手段は、上記他の物体のうち上記条件を満たす物体が上記自車から最も近い物体の向こう側に上記自車の走行の障害となり得る物体として存在すると判断する。
(もっと読む)
物体検出装置
【課題】歩行者のようなレーダの送信信号に対する低反射物体であってもレーダにより確実に検出することができる物体検出装置を提供する。
【解決手段】車両に搭載されたカメラ100によって撮像された画像に基づいて物体40の種類を判定する物体種類判定部102と、車両に搭載された電磁波を送信するレーダ20の受信信号に基づいて物体40に関する情報を検出するレーダ物体検出部211と、前記レーダ20を制御するレーダ制御部200とを備え、レーダ制御部200は、物体種類判定部102が判定した物体40の種類に応じて、レーダ20の距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御する。
(もっと読む)
移動物体検出装置、移動物体検出方法及び移動物体検出用コンピュータプログラム
【課題】レーダの検知範囲内に存在する静止物体を移動物体として誤検出することを抑制可能な移動物体検出装置を提供する。
【解決手段】移動物体検出装置(1)は、レーダ(2)から、そのレーダからの距離とその距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信するインターフェース部(11)と、複数の計測データのそれぞれから第1の閾値以上となる受信レベル信号を検出し、レーダからの距離ごとに、第1の閾値以上となる受信レベル信号の出現頻度を表す背景値を求める背景データ更新部(21)と、計測データ中で第1の閾値よりも高い第2の閾値以上の強度を持つ受信レベル信号に対応する距離にある物体のうちで、背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する移動物体検知部(22)とを有する。
(もっと読む)
物標検出装置,壁判定方法
【課題】車両の周囲に存在する物体を検出する物標検出装置において、壁状の静止物体が移動物体として誤認識される頻度を低減する。
【解決手段】探査周期毎に測距データを取得し(S100)、取得した測距データをクラスタリング(S110)し、自車両が停止中ではない場合(S120-N)、クラスタが単一の反射点からなる場合、即ち、クラスタが示す物標が壁であるか否かを判定できない場合(S140-N)、または、クラスタが複数の反射点からなり(S140-Y)、かつ同一クラスタに属する二つの反射点間を結ぶ直線の傾き(基準方向と交差する角度)Yが許容壁範囲内(X−ΔX≦Y≦X+ΔX)にある場合、即ち、クラスタが示す物標が壁であると判定された場合(S150,S160-Y)、そのクラスタを、トラッキング処理や移動/停止判定の処理対象から除去する(S170)。
(もっと読む)
車列長測定装置、車列長測定方法及び車列長測定用コンピュータプログラム
【課題】特殊な車両及び車両を後方から撮影するカメラを用いずに、車両の列の長さを測定できる車列長測定装置を提供する。
【解決手段】車列長測定装置は、所定の検知範囲内の車両の前面に対向して設置されたセンサから取得したセンサ信号に基づいて車両を検知し、検知された車両の位置及び速度を求める車両検知部21と、検知された車両のうち、センサに接近中でかつ最も近くを走行中の第1の車両の位置及び速度の変化から、第1の車両の停止位置を推定する停止位置推定部24と、推定された停止位置よりも車間距離だけセンサに近い位置を停車中の車両の列の最後尾と推定することで、停車中の車両の列の長さを求める車列長推定部25とを有する。
(もっと読む)
移動体通信システムおよび移動体ならびにそのビームの方向制御方法
【課題】 GPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を計算しなければならない環境下において、送信側移動体が受信側移動体の方向に的確にビームを照射することが可能な移動体通信システムの提供。
【解決手段】 ペンシルビームを用いて移動体1〜4間で通信を行う移動体通信システムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御部24と、受信側移動体が送信ビームを受信し、受信した送信ビームに基づきモノパルス測角を行うモノパルス測角部34と、受信側移動体から送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知部35とを含み、ビーム制御部24は受信側移動体から取得した測角誤差値に基づきペンシルビームの照射方向を補正する。
(もっと読む)
1 - 20 / 1,037
[ Back to top ]