
Fターム[5J070AE03]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 軌道上移動物体(列車など) (32)
Fターム[5J070AE03]に分類される特許
1 - 20 / 32
車上装置、及び、列車の走行距離算出方法
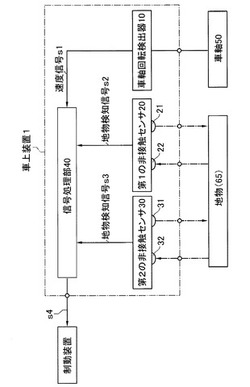
【課題】列車の走行距離を、低コストで、しかも連続的かつ高精度に算出しうる車上装置、及び、列車の走行距離算出方法を提供する。
【解決手段】本発明に係る車上装置1は、複数の非接触式センサ20、30を有し、前記非接触式センサ20、30のそれぞれから入力される地物検知信号s2、s3に基づいて列車の走行距離を算出する。
(もっと読む)
2チャネル追尾装置、および追尾方法

【課題】衛星位置検出の精度の低下を防止する、2チャネル追尾装置および追尾方法を提供する。
【解決手段】追尾装置1は追尾信号から和信号と差信号を生成し、和信号を信号発振器14が生成する変調信号で抑圧搬送波振幅変調を行い、変調和信号と差信号を合成する。和信号と合成信号を増幅し、中間周波数に変換し、伝送する。AGC回路20は和信号を増幅し、AGC回路21は和信号の利得との差分が所定の範囲内になるよう合成信号を増幅する。検波器24と検波器23は、和信号と90°移相した和信号でそれぞれ合成信号を位相検波し、追尾誤差信号の同位相成分と直交位相成分を検出する。同期検波器26と同期検波器25は、同位相成分と直交位相成分を変調信号で同期検波し、伝送された変調信号の同位相成分と直交位相成分を検出し、伝送中の位相変動αと振幅変動Aを算出する。αとAに基づき追尾誤差信号の直流成分を補正し、アンテナ駆動部などに送る。
(もっと読む)
踏切障害物検知装置
【課題】送信部及び受信部を内部に収容する筐体の電波透過部に付着した付着物(雪、水滴、塵など)に起因する信号レベルの低下及びこれに伴う検知漏れを抑制し、踏切道内における障害物の有無を安定して検知することのできる踏切障害物検知装置を提供する。
【解決手段】踏切障害物検知装置は、送信部から電波透過部を介して電波を送信するとともに送信された電波の反射波を前記受信部によって受信し、受信された反射波に基づいて踏切道内における障害物の有無を検知する。踏切障害物検知装置は、筐体内に付着物除去手段としての振動発生部を有する。そして、送信部による電波の送信が可能な領域内に存在する特定の固定物による反射波の信号レベルを監視し、監視された反射波の信号レベルが所定の判定レベルよりも低下すると、振動発生部を駆動して電波透過部を振動させる(ステップS1〜S3、S5)。
(もっと読む)
レーダ装置
【課題】物標がアンテナのメインローブ方向に在るのか、あるいはサイドローブ方向に在るのかを比較的簡易な構成で判別できるようにしたレーダ装置を提供すること。
【解決手段】信号処理部100は、サイドローブの指向特性が異なる2つの受信アンテナRA1,TA2を選択的に切り替えて物標との距離を算出し、算出した距離が同一距離であって、その距離の算出の基礎とした各受信アンテナの受信レベルの差を判定する。
(もっと読む)
無線周波数識別タグ位置測定方法及び装置
【課題】無線周波数識別RFIDタグ位置測定方法及び装置を提供する。
【解決手段】方法は、コンピュータが、RFIDリーダのアンテナを使用して複数の指定発射電力毎に線形配列となる対象タグを所定回数読み取り、各対象タグについて指定発射電力毎のアンテナによる読取が成功した回数を記録し、各対象タグについてのアンテナによる読取成功回数の合計を算出し、各対象タグ毎の読取成功回数の合計に対してソートすることにより各対象タグのアンテナに対する配列順序を特定し、各対象タグ毎のアンテナに対する正規化の読取確率を算出し、各対象タグ毎のアンテナに対する正規化の読取確率に基づいて、タグのアンテナに対する正規化の読取確率とタグのアンテナに対する距離との対応関係が記録される読取確率マップを検索することにより、各対象タグ毎の前記アンテナに対する距離を特定することを特徴とする。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】移動体が移動する移動路に沿って等間隔に順に配置される共振タグに専用のアンテナと、このアンテナを介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】隣り合うものの共振周波数が異なるように移動体が移動する移動路に沿って等間隔に順に配置される複数種類の共振タグのそれぞれに専用のアンテナと、このアンテナの各々を介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
無線距離・速度計測装置
【課題】送信信号と復調用信号の中心周波数ずれや送信タイミングと復調用信号の生成タイミングのずれに起因する距離や相対速度の計測誤差をなくし、距離や相対速度の計測精度を向上させる。
【解決手段】FM−CW波の送信動作と受信動作を、送受信機10と送受信機20との間で交互に行い、受信側送受信機で、送信側送受信機の信号送信タイミングに同期させて復調用信号を発生させ受信信号を復調処理してビート信号を生成し、生成されたビート信号のビート周波数を検出し、両送受信機10、20で検出したビート周波数の検出結果を用いて、送受信機10と送受信機20との間の距離や相対速度を計測する。
(もっと読む)
列車位置検知システムおよび移動無線機
【課題】 列車に搭載された移動無線機と予め定められた位置に設置された固定無線機との間の無線通信を通じて列車の在線位置を検知する際に、マルチパスフェージングなどの影響を抑制し、列車の在線位置を高精度に検知できる列車位置検知システムを提供する。
【解決手段】 移動無線機1の在線位置と固定無線機10の設置位置との位置関係に基づき角度制御信号を生成し、該角度制御信号に基づき、振幅・位相調整部4において入力信号の振幅および位相を調整して、移動無線機1のアンテナ2のビーム方向が固定無線機10の設置方向に向くように制御する。
(もっと読む)
レーダ装置
【課題】アンテナから放射された電磁波ビームの地面反射波の受信を回避しながら、地上高さの低い物体を検知できるレーダ装置を提供すること。
【解決手段】アンテナ11〜13のそれぞれは、扇形の広がりをもつ電磁波ビームB1〜B3を放射し、被検知物3によって反射された電磁波ビームの反射波を受信するものであって、順次に縦積みされて地面4から所定高さh1〜h3にある。地面4からの被検知物3の地上高さをH(m)とし、アンテナ11〜13から被検知物3までの距離をR(m)としたとき、アンテナ11〜13の何れも、自己の放射する電磁波ビームB1〜B3の扇形最下縁が、距離Rの範囲内において、地上高さHを超えず、かつ、受信反射波に地面4で反射された反射波が含まれない仰角θ1〜θ3を持つ。
(もっと読む)
踏切障害物検知装置
【課題】設置容易な踏切障害物検知装置を提供する。
【解決手段】センサ装置1a,1bは、踏切への列車Tの接近を検知するために、それぞれ遮断棹32a,32bの降下を検知する。また、センサ装置1a,1bは、検知領域S内の障害物5,6の検知を行うとともに、列車Tの踏切の通過を検知する。センサ装置1a,1bは、降下した遮断棹32a,32bからの反射波を検出したときに、検知領域S内の障害物5,6の検知を開始し、踏切を通過する列車Tからの反射波を検出したときに、検知領域Sのうち、少なくとも列車Tが走行する線路Ra,Rb内の障害物5,6の検知を停止する。
(もっと読む)
リーダライタ、及び物品位置検出システム
【課題】ある時刻tにおけるタグの位置(x,y)を高精度に推定することができるリーダライタ、及び物品位置検出システムを提供する。
【解決手段】このPC(制御手段)9は、リーダライタ1と情報の授受を行なう通信部10と、リーダライタ1から得られたプロファイル7を記憶するプロファイル記憶部(プロファイル記憶手段)11と、プロファイル記憶部11に記憶された基準となるタグに係る基準プロファイルと物品の情報を記録したタグに係る物品プロファイルとを比較するプロファイル比較部(プロファイル比較手段)13と、ベルトコンベア10に係る基準位置を算出する基準位置算出部14と、制御部12と、を備えて構成されている。
(もっと読む)
移動目標検出装置
【課題】移動目標の検出性能の低下を抑えて、移動目標の検出及び速度推定を実施することができる移動目標検出装置を得る。
【解決手段】プラットフォームの移動方向に分割可能な開口を持つアンテナを用いて取得された2つの受信信号をそれぞれ格納するデータ格納部1、2と、データ格納部1、2に格納されたレーダ画像2枚分の受信信号についてそれぞれ距離方向に圧縮するレンジ圧縮処理部10A、10Bと、2つのレンジ圧縮後のデータをもとに移動目標を検出する移動目標検出部20と、検出された移動目標の各観測時刻におけるアンテナとの距離から目標速度を推定する目標速度粗推定部50とを設けた。
(もっと読む)
レーダ装置およびアクティブターゲット装置
【課題】レーダ波を送信して目標物からの折り返し信号を受信し、各目標物との詳細な距離/速度を検出するとともに、目標物における無駄な電力消費を削減する。
【解決手段】制御部101は、無線通信機能の動作時に、目標物のアクティブターゲット装置を指定する局ID情報を含むパケットデータPDを出力し、変調回路105は、そのデータを発振器104からのレーダ波に乗せて送信する。アクティブターゲット装置は、自局の局ID情報を受信した場合に折り返し送信を起動し、ミキサ108は、レーダ機能の動作時に、送信レーダ波の一部と折り返し送信されたレーダ波を混合することにより、ビート信号を検出する。
(もっと読む)
リーダライタ、及び物品仕分システム
【課題】RFIDタグの配列順序とアンテナに対する移動方向を識別することができるリーダライタを提供する。
【解決手段】このリーダライタ50は、VCO2の出力信号の位相を、基準となる入力信号の位相に同期させるPLL回路1と、PLL回路1の制御電圧に基づいて所定の周波数を発振するVCO2と、VCO2から発信された信号をマイクロ波に変調する変調器3と、マイクロ波の方向により向きを決定するサーキュレータ5と、マイクロ波を発信してタグ7からの反射波を受信するアンテナ6と、sin波を復調するミキサ9と、cos波を復調するミキサ11と、ミキサ9の信号から所定の周波数成分のみを通過するBPF12と、ミキサ11の信号から所定の周波数成分のみを通過するBPF13と、A/Dコンバータ14とA/Dコンバータ16から位相を演算する演算器15と、を備えて構成されている。
(もっと読む)
追尾復調受信装置および該追尾復調受信装置による誤差信号生成方法
【課題】オーバーシュート無しに素早くアンテナを追尾対象の方向に指向させる。
【解決手段】本発明の追尾復調受信装置は、アンテナから入力された和信号および差信号を基に、アンテナの現角度と目標角度との角度誤差を表す角度成分信号を生成する角度成分信号生成手段と、角度成分信号生成手段で生成された角度成分信号を角度誤差に応じた利得で増幅して誤差信号として出力する可変利得増幅手段と、を有する。
(もっと読む)
電子ビーム走査アンテナ制御回路及び該制御回路を備えた電子ビーム走査アンテナ装置
【課題】高速走査性等を実現する電子ビーム走査アンテナ装置等を提供する。
【解決手段】複数のアンテナ素子と移相器とを備えた電子ビーム走査アンテナを制御するための制御回路であって、前記各々の移相器うちの一部の移相量を制御電圧として演算制御する移相量演算制御回路と、複数の抵抗を有する双線形性の抵抗網回路とを備え、前記各々の移相器は、フロントエンドプロセッサを介して前記抵抗網回路のうちの対応点にそれぞれ接続され、前記抵抗網回路は、前記各々の移相器のうちの一部に対する前記対応点に印加された移相量としての制御電圧によって、他の移相器に対応する前記対応点に各々の移相器に対する移相量としての制御電圧を生成し、前記フロントエンドプロセッサは、前記抵抗網回路の各々に接続された対応点から前記生成された各々の制御電圧を抽出し、A−D変換したうえで前記各々の移相器に対する制御値として設定することを特徴とする。
(もっと読む)
追尾型アンテナ制御装置
【課題】衛星が移動体の真上付近にある場合でも、安定した追尾が可能な追尾型アンテナ制御装置を提供することを目的とする。
【解決手段】位相比較器15が、二つのアンテナ素子2L、2Rの受信した信号の位相差から検出した衛星の方向とアンテナ方向のXA軸回りのズレを、低域通過フィルタ16を通し、AD変換器17でサンプリングして電波によるXA軸回りの誤差信号ΔξA.DETを生成する。ATT絶対方位検出器19は、角速度計18の検出した角速度に対し方位軸回転台の傾きの影響を補償した方位軸回転台の絶対方位の角速度の第3成分に、位相比較器15が検出したXA軸回りの誤差信号ΔξA.DETを加え、積算したものをATT絶対方位検出値とし、ATT絶対方位検出値と衛星方位角データの差をATT絶対方位検出誤差として方位軸サーボ制御器20に供給し、方位軸を制御する。また、衛星方位データに基づき、絶対方位の検出値を補正する。
(もっと読む)
踏切障害物検知装置
【課題】踏切道内の障害物の誤検知を防いで確実に障害物を検知する。
【解決手段】踏切遮断機8の近傍に設けたセンサユニット2の面センサ5から標準反射体4にミリ波ビームを照射する。標準反射体4からの反射ビームの受信信号から反射強度計測部12で標準反射体4からの反射強度を計測し、計測した反射強度と検知条件記憶部11に記憶した基準反射強度に対する変化を反射強度判定部14で判定する。この反射強度の変化に応じて面センサ5の受信信号から障害物を検知するための閾値を閾値補正部15で補正して面センサ5の水平方向の検知領域を踏切道内に絞り、障害物検知の死角をなくすとともに踏切遮断機外の物体や遮断桿を障害物として検知することを防ぐ。
(もっと読む)
追尾方法及びその装置
【課題】 加速度運動を行う目標を精度よく追尾する追尾方法を得る。
【解決手段】 第1の時間の平滑誤差共分散行列から第2の時間の予測誤差共分散行列を算出し、第2の時間の予測誤差共分散行列と第2の時間のゲイン行列と所定の観測雑音共分散行列とに基づいて第2の時間の平滑誤差共分散行列を算出し、第2の時間の予測誤差共分散行列と観測雑音共分散行列から、第2の時間の予測値ベクトルに含まれる目標の位置についてのゲインである位置ゲインと第2の時間の予測値ベクトルに含まれる目標の速度についてのゲインである速度ゲインとを含む第2の時間のゲイン行列を算出し、第2の時間の観測値を取得し、取得した観測値と第2の時間の予測値ベクトルと第2の時間のゲイン行列とに基づいて第2の時間の平滑値ベクトルを算出する追尾方法において、速度ゲインとして固定値のゲインを含む第2の時間のゲイン行列を算出する。
(もっと読む)
1 - 20 / 32
[ Back to top ]