
国際特許分類[B62D5/30]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 動力補助または動力駆動される操向 (7,105) | 流体を用いるもの,すなわち.車両の操向に必要な力の大部分またはその全部を加圧流体を用いて得るもの (1,419) | 安全装置,例.主操向装置の故障時に操向を確保するための,代りの緊急動力の供給または伝達装置 (244)
国際特許分類[B62D5/30]の下位に属する分類
テレモータ方式のもの
国際特許分類[B62D5/30]に分類される特許
1 - 10 / 244
車両用サスペンション装置、そのジオメトリ調整方法および自動車
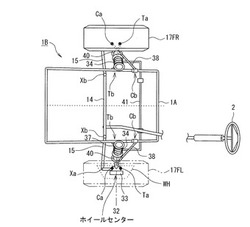
【課題】車両前後方向の力に対するコンプライアンスステア特性をより適切なものとする。
【解決手段】車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車軸に沿って配置したトランスバースリンク部材と、車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車体との連結部がトランスバースリンク部材と車体との連結部よりも後方に位置すると共に、ホイールハブ機構との連結部がトランスバースリンク部材とホイールハブ機構との連結部よりも前方に位置するコンプレッションリンク部材と、トランスバースリンク部材およびコンプレッションリンク部材のホイールハブ機構との連結部よりも外側においてホイールハブ機構と連結し、該ホイールハブ機構との連結部よりも後側においてステアリングラック部材と連結し、車輪を転舵させるタイロッド部材とを有する車両用サスペンション装置とした。
(もっと読む)
電動パワーステアリング装置

【課題】二重制御系統を備えた電動パワーステアリング装置において、サブマイクロコンピュータの実装を必要としない電動パワーステアリング装置を提供する。
【解決手段】制御装置5A,5Bを2系統有し、各制御装置5A,5Bは、相手系統の故障を推定する故障推定部56,66を備え、故障推定部56,66は、電動モータ1a,1bの出力値が目標指令値に収束する時間Teを監視し、この収束時間Teが基準時間γよりも長い場合に、他系の制御装置の故障を推定するものであり、他系の制御装置の故障を推定した正常側の制御装置は、正常側の制御装置の制御周期T0を短くしかつ制御ゲインK0を上げる制御を行う。
(もっと読む)
車両制御システムおよび車両制御方法
【課題】複数の演算制御装置による車両制御において、異常状態から正常状態への復帰を適切に行うことができる車両制御システムおよび車両制御方法を提供することを課題とする。
【解決手段】本発明は、通信手段により互いに通信可能に接続された第1演算制御装置と第2演算制御装置とを備える車両制御システムであって、第2演算制御装置は、第1演算制御装置により演算された第1の目標制御量と、第2演算制御装置により演算された第2の目標制御量との差が、第1閾値以下である場合は、通信状態が正常であることを示す監視結果を、第1演算制御装置へ送信し、第1演算制御装置は、第2演算制御装置により送信された監視結果が正常であり、かつ、第1の目標制御量が第2閾値以下であると判定した場合、第2演算制御装置に転舵制御を実行させる。
(もっと読む)
流体圧ステアリングシステム
【課題】単一シリンダ流体圧ステアリングシステムの操舵ポンプを使用可能な複数シリンダ流体圧ステアリングシステムを提供する。
【解決手段】流体圧ステアリングシステム10は、アクチュエータポート24、25、54、55を有する第1、第2流体圧アクチュエータ20、50とを備える。第1および第2の方向にシステムを操舵する操舵装置19は、操舵ポンプ12に接続される。操舵装置19はアクチュエータポート24、25に接続される。アクチュエータポート54、55に接続されるパワーステアリングポンプ40がある。システムの操舵を検知可能な位置センサ63がある。位置センサ63は、操舵装置19が第1の方向に操舵されるとき第3アクチュエータポート54の方に作動流体を噴出し、操舵装置19が第2の方向に操縦されるとき第4アクチュエータポート55の方に作動流体を噴出するように、パワーステアリングポンプ40に動作可能に接続される。
(もっと読む)
作業車両のアキュムレータの異常検出方法および装置
【課題】オペレータにより作業車両の走行が開始されるタイミングに合わせて、アキュムレータ内の圧油不足を報知することができるようにすること。
【解決手段】パーキングブレーキスイッチ33による指令内容を判定する第1判定手段51と、作業車両の走行時にアキュムレータ20に蓄えられてあるべき圧油の圧力の基準値よりもアキュムレータ20内の圧力が低いか否かの判定を、第1判定手段51による判定が終了したタイミングで行う第2判定手段52と、パーキングブレーキスイッチ33による指令内容がパーキングブレーキ装置30の解除であると第1判定手段51によって判定された場合に、第2判定手段52によりアキュムレータ20内の圧力が基準値よりも低いと判定されたことを、第2判定手段52による判定が終了したタイミングで表示器55およびスピーカ56を制御して報知する報知制御手段53とを備える。
(もっと読む)
操舵装置
【課題】ブーツ内に水分等が侵入する前にブーツの異常を発見でき、早期の点検、修理が可能となる操舵装置を提供する。
【解決手段】ラックハウジング2の各端部2a,2bから対応するタイロッド7,11の途中部までの間を、第1ブーツ14および第2ブーツ15が覆う。操舵角センサ42による検出結果により操舵の有無を判断する。操舵有りにも拘らず、第1ブーツ14の第1空間S1内の第1気圧センサ16が検出した気圧P1、および第2ブーツ15の第2空間S2内の第2気圧センサ17が検出した気圧P2の少なくとも一方に実質的な変化がないときに、両ブーツ14,15の少なくとも一方の異常を検出し、警告灯45を点灯させる。
(もっと読む)
車両の操舵装置および操舵方法
【課題】前後どちらの転舵系が故障しても、操舵応答に大きく寄与する前輪の転舵を補償することにより、操舵応答が大きく悪化するのを回避し得るようになす。
【解決手段】A側車輪3の操舵アクチュエータ27を含む転舵機構と、B側車輪4の操舵アクチュエータ28を含む転舵機構との間を、所要に応じ機械的に結合可能なクラッチ41を設ける。A側車輪転舵系およびB側車輪転舵系が共に正常である場合、コントローラ12はクラッチ41を解放すると共に、操舵角θおよび車体速Vを基に演算した目標挙動が達成されるよう、A側操舵アクチュエータ27およびB側操舵アクチュエータ28を個々に動作させ、右輪3,4を個別に転舵する。A側車輪転舵系またはB側車輪転舵系が故障した場合、コントローラ12はクラッチ41を締結する。この締結により、故障していない正常な転舵系の側操舵アクチュエータ27または28を用いて、故障している側の車輪を引き続き転舵することができ、前輪の転舵を補償して操舵応答の大きな悪化を回避することができる。
(もっと読む)
操舵制御装置
【課題】装置全体を小型化可能な操舵制御装置を提供する。
【解決手段】操舵制御装置1のウォームギア32は、ウォーム51の回転によりウォームホイール50は回転するが、ウォームホイール50の回転によりウォーム51は回転しないようにセルフロック可能なリード角が設定されている。これにより、ロック機構を歯車機構30と別途に設ける必要がなく、装置全体を小型化することができる。また、VGRS制御部は、ウォームギア32においてセルフロック不能となるセルフロック失陥が生じているか否かを判断し、セルフロック失陥が生じていると判断された場合、ハンドルが空転しないように空転抑制処理を行う。これにより、セルフロック失陥時においても、ハンドルの空転が抑制されるので、安全性が向上する。
(もっと読む)
操舵装置
【課題】操舵装置の信頼性を向上させる。
【解決手段】操作レバー22,23は、転舵駆動軸16にそれぞれ、連結装置40,42によって連結される。それら操作レバー22,23に加えられた操作力の合力が転舵駆動軸16に加えられ、操舵輪6が転舵される。また、操作レバー22,23の片方を操作すれば、転舵駆動軸16に操作力を伝達することができるのであり、連結装置40,42のいずれか一方が異常であっても、操作レバー22,23の少なくとも一方の操作力を転舵駆動軸16に加えることができる。さらに、電気系統が故障しても、転舵駆動軸16に操作力を加えることができる等操舵装置の信頼性を向上させることができる。
(もっと読む)
車両用操舵装置
【課題】操舵機構と転舵機構とを機械的に完全に分離した構成で、比較的安易にフェール時のバックアップを行うことができる車両用操舵装置を提供する。
【解決手段】操舵機構2と転舵機構4とを機械的に分離したステアバイワイヤ式の車両用操舵装置1において、ステアリングシャフト22にバックアップモータ24を接続し、ピニオンシャフト43にバックアップモータ45を接続する。そして、ステアバイワイヤ機能に異常が発生したとき、接続回路5及び接続ケーブル6A,6Bを介してバックアップモータ24とバックアップモータ45とを電気的に接続する。これにより、操舵機構2と転舵機構4とを電気的に接続し、異常発生時における最低限の操舵機能を確保する。
(もっと読む)
1 - 10 / 244
[ Back to top ]