
Fターム[2B033EC01]の内容
土作業機(ロータリ) (5,852) | 抵抗棒 (174) | 構成又は形状 (67)
Fターム[2B033EC01]に分類される特許
21 - 40 / 67
歩行型移動農機
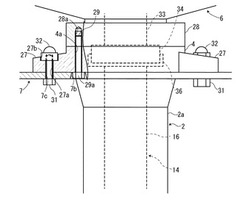
【課題】機体フレームの少なくとも一部を構成する伝動ケースにエンジンを取付支持する支持部を備え、耕耘作業機の少なくとも上方側を覆う耕耘カバーを設けるにあたり、構造を複雑化させること無く、伝動ケース側に耕耘カバーに取付けることができる歩行型移動農機を提供することを課題とする。
【解決手段】本発明は、エンジン6からの動力を耕耘作業機3に伝動する伝動機構14が内装された伝動ケース2によって機体フレーム1の少なくとも一部を構成し、耕耘作業機3の少なくとも上方側を覆う耕耘カバー7を設け、伝動ケース2における耕耘作業機3よりも上方位置にエンジン6を取付支持する支持部4を設けた歩行型移動農機において、前記支持部4から水平方向外側に向って取付座27を一体的に延設し、該取付座27に耕耘カバー7を取付ける。
(もっと読む)
歩行型管理機

【課題】歩行型管理機を用いての畝立て作業を、機材の取り換えの手間を要することなく能率よく行えるようにする。
【解決手段】操縦ハンドルを後方に延出した走行機体に耕起ロータを装備し、走行機体に対する前進抵抗を加減する棒13を、走行機体の後部に下向きに取り付ける。上部が幅広で下部が幅狭の支持枠21を、棒13の前側で且つ耕起ロータの後側に位置するように棒13に取り付ける。上側ほど横外側となる傾斜した右及び左の横外縁を備えたゴム板で支持枠21よりも幅広の成形板22を、支持枠21に取り付けて、耕起ロータで耕起した土を走行機体の前進に伴って成形板22により押圧して畝を成形するように構成する。
(もっと読む)
歩行型管理機
【課題】機体側から後方側に延びる操向操作を行うハンドルと、機体側に支持された左右方向の駆動軸と、駆動軸に設けられたロータリとを備え、ロータリの回転によって機体を前進走行させるとともに圃場での耕耘作業を行う歩行型管理機において、ロータリによる前進走行開始時に、ハンドルの操作性が低下することを防止可能な歩行型管理機を提供することを課題とする。
【解決手段】本発明は、機体8側から後方側に延びるハンドル11と、機体8側に支持された左右方向の駆動軸13に設けられたロータリ14とを備え、ハンドル11によって操向操作を行うとともに、ロータリ14を回転駆動させるのみによって前進走行及び圃場での耕耘作業を行う歩行型管理機において、ハンドル11を、機体8に対して弾力的に上下揺動可能に支持するとともに操向操作可能な姿勢で保持可能に構成する。
(もっと読む)
歩行型管理機
【課題】歩行型管理機において、揚土作業時に、ハンドル逆姿勢の操向ハンドルを持ち上げながら歩行型管理機を前進させて、耕耘機構の浮き上がりを防止する作業をなくす。
【解決手段】本願発明に係る歩行型管理機は、機体1に搭載された動力源7と、前記機体1の下方に前後に並べて配置された左右一対の走行部2及び耕耘機構3と、前記機体1の上部に向き変更可能に設けられた操向ハンドル4とを備える。前記機体1のうち前記走行部2を挟んで前記耕耘機構3と反対側の端部には、地面に接地する起立姿勢と地面から離れる収容姿勢とに姿勢変更可能に構成された補助輪体40を取り付ける。補助輪体40は、上端側を回動支点として機体1に上下回動可能に取り付けられたスタンド部41と、スタンド部41の下端側に回転可能に設けられた補助輪42とを備える。
(もっと読む)
歩行型管理機
【課題】歩行型管理機において、揚土作業時に、ハンドル逆姿勢の操向ハンドルを持ち上げながら歩行型管理機を前進させて、耕耘機構の浮き上がりを防止する作業をなくす。
【解決手段】本願発明に係る歩行型管理機は、機体1に搭載された動力源7と、前記機体1の下方に前後に並べて配置された左右一対の走行部2及び耕耘機構3と、前記機体1の上部に向き変更可能に設けられた操向ハンドル4とを備える。前記機体1のうち前記走行部2を挟んで前記耕耘機構3と反対側の端部には、前記耕耘機構3を進行方向前側にして進行する際に接地して前記走行部2と共に前記機体1を支持する補助輪体40を昇降調節可能に取り付ける。
(もっと読む)
ロータリ耕耘装置用の整地部材
【課題】コスト的に有利であり、尚且つ作業性も良いロータリ耕耘装置用の整地部材を提供すること。
【解決手段】中部材21及び支持板25の一方に第1の軸27及び第2の軸28を設け、中部材21及び支持板25の他方に第1の軸27を挿通する第1貫通孔25aと、第2の軸28を挿通する円弧長孔の第2貫通孔25dとを設け、第1貫通孔25aに挿通された第1の軸27を抜け止めする第1抜け止め部と、第2貫通孔25dに挿通された第2の軸28を抜け止めする第2抜け止め部とを設けて、支持板25を第2貫通孔25dに沿って回動させることにより、支持板25を横向き姿勢及び縦向き姿勢に姿勢変更自在に構成してある。
(もっと読む)
培土器
【課題】耕起土がスムーズに流れ易く、尚且つ畝のエッジ部分が綺麗に仕上がる培土器を提供すること。
【解決手段】耕起土を下方に押圧して畝底面C1を形成する下辺部Bと、耕起土を左右に排出しながら押圧して畝側面C2を形成する横辺部22aとを備え、横辺部22aの端部の上下中央部Dが、横辺部22aの左右中央側の部分よりも後方側に位置するように、且つ、横辺部22aの端部の上下中央部Dが、横辺部22aの端部の上端及び下端よりも後方側に位置するように構成される。
(もっと読む)
耕耘装置
【課題】耕耘ロータリの耕耘軸とリヤカバーとの隙間に、ロータリカバーを貫通する上下調節自在な接地抵抗棒と耕深調節棒とを前後に配設してなる耕耘装置において、作業性に優れる簡易培土器を装着できるように構成する。
【解決手段】ロータリカバー15の幅方向の中央部後端に弾性部材からなる簡易培土器31を取付ける一方、該簡易培土器31の下部を、接地抵抗棒17の後方に配設した耕深調節棒18の下部に備える橇状の安定板18aの後端に取付け可能に構成した。
(もっと読む)
ロータリ耕耘装置用の整地部材
【課題】コスト的に有利であり、尚且つ作業性も良いロータリ耕耘装置用の整地部材を提供すること。
【解決手段】可撓性を有する2つの平板18を備え、2つの平板18のそれぞれの上端部18aがロータリ耕耘装置のカバー11の後端部に連結された状態で、2つの平板18がカバー11の後端部に沿って横方向に並設されており、平板18の下辺部18bに沿った横向き姿勢で横方向に並設されて取り付けられた状態、及び平板18の外側縦辺部18eに沿った縦向き姿勢で平板18に取り付けられた状態に姿勢変更自在に、金属製の支持板25を2つの平板18のそれぞれに備えてあるロータリ耕耘装置用の整地部材。
(もっと読む)
管理機
【課題】ロータリーカバーに均平板を簡単な構造で取り付けられ、均平作業と畝立て作業とを容易に切り替えられるようにする技術を提供することを課題とする。
【解決手段】前記ロータリーカバー23の後端辺に、左右方向に所定間隔をあけて側面視略U字状のカバー側掛止部23a・23b・23cを設け、均平板51の前端辺に、前記カバー側掛止部23a(23b)(23c)とカバー側掛止部23a(23b)(23c)との間に配置される側面視略逆U字状の均平板側掛止部52b・52c・53cを設け、前記カバー側掛止部23a・23b・23cと均平板側掛止部52b・52c・53cとを支点軸55により着脱可能に支持する。
(もっと読む)
ロータリ耕耘装置用の整地部材
【課題】コスト的に有利であり、尚且つ作業性も良いロータリ耕耘装置用の整地部材を提供すること。
【解決手段】可撓性を有し、その上端部がロータリ耕耘装置のカバーの後端部に連結されている横長状の平板18を備え、平板の下辺部18bに沿った横向き姿勢で横方向に並設されて取り付けられた状態、及び平板18の横方向の中央部に縦向き姿勢で取り付けられた状態に姿勢変更自在に、金属製の2つの支持板25を備えており、カバーの後端部の下方に位置するようにロータリ耕耘装置に備えられた固定部に、平板の下辺部18bにおける支持板25の間の部分を着脱自在に構成するロータリ耕耘装置用の整地部材17。
(もっと読む)
管理機
【課題】均平作業と畝立て作業とを容易に切り替えられ、「外盛り」「内盛り」の両畝立て作業が可能な畝立装置の提供を課題とする。
【解決手段】前記ロータリーカバー23の後端部に、着脱可能、かつ、上下回動自在に取り付けられ、左右対称に構成される左右一対の第一成形板52・52と第二成形板53R・53Lとを備え、該第一成形板52・52と第二成形板53R・53Lは、それぞれ左右一側に斜辺を有し、該斜辺にヒンジ部をそれぞれ設けて第一成形板52・52と第二成形板53R・53Lを回動自在に連結し、前記左右の第一成形板52・52を機体左右中央でロータリーカバー23に固定する状態と、前記左右の第一成形板52・52を機体左右両側でロータリーカバー23に固定する状態と、に切り替え可能に構成する。
(もっと読む)
耕耘装置
【課題】耕耘作業も培土作業も行なうことができる耕耘装置をコンパクトな状態で得る。
【解決手段】耕耘ロータカバー13を上下方向に貫通するとともに耕耘ロータ12の後側を上下方向に通る接地抵抗棒14を備えてある。耕耘ロータカバー13の後端部に上端部が横幅方向に亘って支持されて、下端側が耕耘ロータ12及び接地抵抗棒14の後方に垂れ下がるゴム板から成る培土板22を備えてある。培土板22の下端部の作業反力による後方側への移動を抑制して培土板22を作用状態に維持するように培土板22の下端部の培土板横幅方向での中央部に支持作用する培土板支持部21bを備えてある。
(もっと読む)
歩行型管理機
【課題】仕上がりがよい培土作業を簡単な構造で行える歩行型管理機を得る。
【解決手段】操縦ハンドル(4)が後方向きに延出されるとともに耕起ロータ(16)が装備された走行機体(1)を備えてある。ゴム板から成る成形板を備えた培土器(20)を、走行機体側に上端部が支持されて耕起ロータ(16)の後方位置で垂れ下がる状態で設けてある。成形板を、畝側面を押圧する反力に抗して畝成形作用姿勢に維持するように、成形板の成形板横幅方向での中央部に成形板の後面側から当接して支持作用する棒(13)を設けてある。成形板の横幅方向での両側部に、走行機体側に支持される部位に対して、畝側面を押圧する接地反力によって後向きに屈曲弾性変形する側端辺を成形板上下方向にわたって設けてある。
(もっと読む)
作業機
【課題】作業機の作業部をケース体に容易に収納できる作業機を提供する。
【解決手段】作業機10は、左右の支持延出部63,64の左右の水平延出部67,69を接地させることで作業機10を運搬姿勢や保管姿勢に自立可能なスタンド手段24と、スタンド手段に取り付けられて耕耘爪15を収納可能なケース体26とを備える。ケース体26のうち左右の支持延出部63,64に対応する部位に左右の嵌合溝部83,84が設けられている。左右の嵌合溝部83,84が左右の支持延出部63,64に嵌合されることによりケース体26が左右の支持延出部63,64に載置される。
(もっと読む)
耕耘機
【課題】耕耘機の構成を簡素化することができ、かつ、耕耘爪の交換や耕耘爪の修理・洗浄などをおこなう際の作業性を向上させることができる耕耘機を提供する。
【解決手段】耕耘機10は、耕耘機本体11に設けられた抵抗棒取付孔33に着脱自在に取り付けられた抵抗棒22およびスタンド手段24を備える。スタンド手段24は、抵抗棒22を外した抵抗棒取付孔33に着脱自在に取付可能なポール部51が設けられ、ポール部51が抵抗棒取付孔33に取り付けられた状態で、スタンド手段24単独で耕耘機10の姿勢を自立状態に保つ。
(もっと読む)
歩行型管理機
【課題】培土作業を簡単な構造で行えるとともに旋回移動を行なわせやすい歩行型管理機を得る。
【解決手段】操縦ハンドル4が後方向きに延出されるとともに耕起ロータ16が装備された走行機体1を備えてある。ゴム板から成る成形板を備えた培土器20を、走行機体側に上端部が支持されて耕起ロータ16の後方位置で垂れ下がる状態で設けてある。培土器20が走行機体側に支持される側を揺動支点にして畝側面を押圧する反力で後向きに揺動した成形作業姿勢になると、培土器20の培土器横幅方向での中央部に対して培土器20の後面側から当接して支持作用する機体上下向きの棒13を設けてある。培土器20の下端辺から突出し、畝底面を押圧する反力によって後方に屈曲される舌片を設けてある。
(もっと読む)
歩行型耕耘管理機
【課題】培土器を用いずに畝立て作業を行うことができ、かつ、畝立て作業を行うか否かを容易に変更することができる歩行型耕耘管理機を提供する。
【解決手段】ロータリ耕耘装置30と、畝立て装置1とを有し、畝立て装置1をロータリ耕耘装置30の後方に配置した耕耘部5を備えたものであって、畝立て装置1は、ロータリ耕耘装置3における耕耘カバー33の後端に上部を取り付けられて、この耕耘カバー33の後端から接地可能に垂れ下がる弾性体であるカバー体12と、前記カバー体の左右中央部12Cの後方に配置されて、このカバー体12の左右両側部12L・12Rの後方への揺動は規制せず、その左右中央部の後方への揺動は規制する規制手段15である抵抗棒6および係止部材16とを備え、カバー体12を規制手段15により一部規制する畝立て作業状態と、前記規制手段により規制しない非畝立て作業状態とに切替可能に構成する。
(もっと読む)
歩行型耕耘機
【課題】 作業ロータ後方の抵抗棒と尾輪を切替えるために、両者の上下回動間にリンク機構を設けて、上下相反する方向へ回動する形態では、リンク作動関節部にがたを生じ易く、ロータの駆動回転によって前進する駆動力に抗するように接地による抵抗を与える抵抗棒や、尾輪は、共に安定した接地状態を維持して耕耘作業推進、乃至走行できることが必要である。
【解決手段】 耕耘爪1を有したロータ軸2を軸装の機体フレーム3の後側に、尾輪4を有した尾輪アーム5と、抵抗棒6を有するソケットアーム7とを、各アーム軸8、9周りに上下回動可能に設け、これら両アーム軸8、9部間をギヤ10、11で噛合させて、上下相反する方向へ回動するように連動構成する。
(もっと読む)
耕耘機
【課題】本発明は、旋回に係る操作性を大幅に高めることができる耕耘機を提供することを課題とする。
【解決手段】耕耘機10は、機体11にエンジン12を備え、このエンジン12から耕耘爪14に駆動力を断接するクラッチ22を備え、機体11に機体11の傾き角度を検出する傾斜角検出センサ20を備え、クラッチ22が接続されているとのクラッチスイッチ の情報を受け、機体11の傾き角度が水平面に対して所定角度範囲内にあるという傾斜角検出センサ20の情報を受けたときにエンジン12の回転速度を高速になるように制御する制御部57を備えている。
(もっと読む)
21 - 40 / 67
[ Back to top ]