
Fターム[2B043EA16]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 車両又は作業機の状態 (190) | 車両と作業機との相対位置 (37)
Fターム[2B043EA16]に分類される特許
1 - 20 / 37
乗用管理機
電動農作業車のモータ制御装置
【課題】走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式の電動農作業車において、バッテリ消費を抑える。
【解決手段】走行機体1に昇降自在に連結される植付作業機3と、該植付作業機3を昇降させる作業機昇降用油圧シリンダ4と、該作業機昇降用油圧シリンダ4に圧油を供給する油圧ポンプ15と、該油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bと、走行動力及び作業動力を発生させる動力用電動モータ5Aと、動力用電動モータ5A及び油圧ポンプ用電動モータ5Bの駆動を制御するモータ制御装置23と、を備える電動乗用田植機において、モータ制御装置23は、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させる。
(もっと読む)
苗移植機

【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
トラクタ
【課題】左右ブレーキの連結を自動的に確保し、路上走行の安全を図る。
【解決手段】走行車体に左右に並設されている左右ブレーキぺダルと、該左右ブレーキぺダルを連結状態としたりあるいは非連結状態とするブレーキ連結解除手段と、ロータリ耕耘装置を昇降回動するリフトアームと、作業モードを走行軽作業モードと耕耘重作業モードに切り換える作業切換ダイヤルと、前記リフトアームの昇降状態を検出するリフトアーム昇降センサと、前記ブレーキ連結解除手段を切換作動するブレーキ連結解除アクチュエータとを備えたトラクタにおいて、前記作業切換ダイヤルを耕耘重作業モード以外への切換状態で、前記リフトアーム昇降センサが前記リフトアームの所定高さ以上の上昇検出をすると、左右ブレーキ連結解除アクチュエータを連結作動し非連結状態にあるブレーキ連結解除手段を左右連結状態にするコントローラを設けたことを特徴とするトラクタとする。
(もっと読む)
作業車両
【課題】作業者に負担を掛けないで、ブレーキペダルの連結と非連結を容易に切り替え可能であり、作業条件に合わせた操作が行える作業車両の提供である。
【解決手段】エンジンと前輪と後輪と苗植付部と左右のサイドクラッチと左右のサイドブレーキと左右のサイドクラッチ及び左右のサイドブレーキを操作可能な左右のブレーキペダル130と副変速レバーと副変速レバーセンサとを設けた走行車両に、左右のブレーキペダル130を連結又は非連結に切り替える切替装置140と、副変速レバーが高速時に切替装置140を作動して左右のブレーキペダル130を連結させる制御装置とを設ける。高速の直進走行時には、左右のブレーキペダル130が連結するため、停止操作が容易に行える。一方、低速時には、左右のブレーキペダル130が連結しないため、作業条件に合わせた操作が行える。
(もっと読む)
田植機
【課題】圃場の環境に左右されることなく、進行方向と苗の並び方向とを確実に整合させることができる田植機を提供する。
【解決手段】左フロントカメラ及び右フロントカメラ21にて圃場に植え付けられた苗を撮像し、撮像された苗を表示部8に表示する。操作者は、表示部8に表示された苗の並び方向を確認して田植機を操舵し、表示部8に表示された線を最も端に位置する苗の列に一致させて、進行方向と苗の並び方向とを整合させることができる構成とした。
(もっと読む)
移植機
【課題】電動ステアリング機構と、電動ステアリング機構を介した操向制御を行う制御部を備え、直進走行後に走行機体を旋回させるための操向操作を自動的に行う自動旋回制御を行うにあたり、オペレータの意図に沿って自動旋回制御を実行する移植機を提供することを課題とする。
【解決手段】本発明は、電動ステアリング機構34と、電動ステアリング機構34を介した操向制御を行う制御部21とを備え、制御部21が、直進走行後に走行機体4を旋回させるための操向操作を自動的に行う自動旋回制御を行う移植機であって、走行機体4の旋回方向を選択する操作を検出する操作検出手段を設け、制御部21は、操作検出手段によって旋回方向の選択操作が検出されたことを少なくとも1つの条件とし、畦際での旋回である小回り旋回が可能な切れ角になるまで該選択された旋回方向に電動ステアリング機構34を自動的に操向作動させる自動旋回制御を実行する。
(もっと読む)
農作業機
【課題】 本発明は、機体の旋回制御を、簡単な構成で行えるようにすること及び様々な旋回形態に対応できるようにすることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止し、作業開始位置で自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動を入切する操作レバー(19)と、該操作レバー(19)を各々の操作位置に位置決めする位置決め機構と、操作レバー(19)を作動させるレバーモータ(99)と、位置決め機構を位置決めしない状態に解除する位置決め解除機構とを設け、レバーモータ(99)から操作レバー(19)への作動連繋機構に融通機構(132a)を設け、前記作業開始位置で、レバーモータ(99)を駆動することにより、位置決め解除機構を作動させると共に操作レバー(19)を作業位置(A)に作動させる構成とした。
(もっと読む)
苗移植機
【課題】作業者が苗植付装置の入切や苗植付部の昇降などを操作することなく、作業者の労力の軽減が図れると共に、苗の植付作業の効率が向上する苗移植機の提供である。
【解決手段】左右前輪10及び左右後輪11と、フレーム15と、左右前輪10を操向操作するハンドル34と、ハンドル34の操向角度を検出する切れ角センサ93と、フレーム15の後方に昇降リンク装置3を介して昇降可能に連結し、苗載台51と苗植付装置52とを備えた苗植付部4と、苗植付装置52の作業状態切替レバー68と、昇降リンク装置3の油圧シリンダ46や油圧バルブ80などの昇降手段と、切れ角センサ93の値に応じて昇降手段による苗植付部4の昇降及び切替レバー68の切替を制御する制御装置100とを設けた苗移植機である。ハンドル操作に苗植付部4の昇降と苗植付装置52の入切が連動するため、作業者が苗植付装置52の入切をする必要がなく、労力が軽減する。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
農作業機
【課題】 機体の旋回制御において、圃場状況や作業形態に応じて更なる作業性向上を図ると共に、作業開始位置あるいは作業終了位置の更なる適正化を図ることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止してからの走行距離が所定の設定走行距離に到達するか又は機体の畦際旋回時に農作業装置の作動を停止してからの時間が所定の設定時間に到達すると自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動停止時又は作動開始時の機体の向きに対する畦の角度を判別する畦角度判別装置と、機体の旋回方向を判別する旋回方向判別装置102を設け、制御装置は、畦角度判別装置と旋回方向判別装置102とに基づき、機体の旋回方向が畦から離れる側であるときに前記所定の設定走行距離を小さく補正し、機体の旋回方向が畦に近づく側であるときに前記所定の設定走行距離を大きく補正する構成とした。
(もっと読む)
作業車両
【課題】耕耘作業を行う作業車両の発進時に、耕耘負荷や走行負荷が大きい場合であっても、エンジン回転数の低下を抑制することができ、エンジンの停止を回避することができる作業車両を提供する。
【解決手段】走行速度を変速する無段変速機を備え、ロータリ耕耘装置を昇降可能に装着する作業車両となるトラクタであって、前記トラクタが停止し、前記ロータリ耕耘装置が接地し、かつ、前記ロータリ耕耘装置が駆動して、その後、前記トラクタが発進する場合は、その発進から規定距離X又は規定時間Tが経過するまでは、前記無段変速機の目標変速比を所定の補正率で減速側に補正するものである。
(もっと読む)
遠隔操作式農業用トラクター
【課題】本発明は、実際に農圃でトラクターに搭乗せずとも、離れた場所からトラクターを遠隔操作することによって、快適かつ安全に作業をすることができ、また、トラクターの過去の運転状態を記憶させることによって、同じ農圃であれば、無人で自動的に反復して農作業をすることができる遠隔操作式トラクターを提供するものである。
【解決手段】エンジンを動力とする走行装置と、前記エンジン駆動により作業機に回転動力を伝達する装置と、前記作業機を牽引しかつ昇降できる作業機用昇降機と、を有する農業用トラクターにおいて、前記農業用トラクターと離れた位置にある遠隔送信機の操作信号を受信し、前記操作信号により前記農業用トラクターの走行速度と走行方向と作業機への伝達回転と作業機の昇降とを制御する指令を出す制御装置を有することを特徴とする遠隔操作式農業用トラクター。
(もっと読む)
作業車両
【課題】圃場の路面状況を適確に把握できると共に、圃場の状態に応じた旋回及び走行が可能で作業効率や操作性が向上する作業車両の提供である。
【解決手段】走行機体Tの後部に装着した作業機Rと、後輪3のブレーキと、前輪2の操作ハンドル7と、前方の路面状況を撮影するCCDカメラ15と、前方の障害物までの距離を検出する超音波センサ17と、旋回時期を報知するブザー50と、CCDカメラ15の画像から前方の障害物までの距離を算出し、超音波センサ17による検出距離とほぼ同じである場合に、旋回までの走行距離を算出して旋回時にブザー50などにより報知すると共にハンドル7操作により走行機体Tが旋回すると作業機Rを上昇させて旋回内側の後輪3のブレーキを作動させ、旋回が終了するとCCDカメラ15の画像から未耕地と既耕地を判断して作業機Rの下降位置を判定し作業機Rを下降させる制御を行う制御装置とを設けた作業車両である。
(もっと読む)
水田作業機
【課題】植播系作業装置の昇降に関連して作動するように構成された昇降関連作業装置の作動を、不要な誤操作などを生じる虞少なく行えるようにする。
【解決手段】植播系作業装置の昇降作動方向、及び植播系作業装置が所定高さ位置H2の上側または下側の何れの側に位置するかの判別結果に基づいて、昇降関連作業装置の作動状態を、昇降作動行程中における所定高さ位置H2の上側と下側とで互いに作動状態が異なり、かつ所定高さ位置H2の下側における作動状態が、昇降作動行程の上昇行程でも下降行程でも同じ作動状態に維持されるように構成し、所定高さ位置H2を変更可能にした。
(もっと読む)
対地作業部付設の作業車両
【課題】圃場における作業領域と作業能率を損なうことなく、機体旋回の終了間際のリスクを抑えて安定した作業走行の再開を可能とする対地作業部付設の作業車両を提供する。
【解決手段】作業車両は、作業位置に下降可能な作業部と、駆動輪の伝動を左右個別に切替え可能なサイドクラッチと、これら作業部およびサイドクラッチのそれぞれについて、直進時は作業位置および両側伝動、旋回時は非作業位置および旋回内側を非伝動に制御する制御部とを備えて構成され、この制御部は、操舵装置による旋回動作の開始により旋回走行距離を計測しつつ、次の直進動作の開始の時に、サイドクラッチを両側伝動に切替えるとともに、この時点以降で所定の旋回走行距離に至る間に、作業部を作業位置に切替えるものである。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体が旋回を開始したと判断する旋回開始判断手段と、旋回開始判断手段により機体が旋回を開始したと判断されてからの旋回中の機体の走行距離Eを連続的に検出する走行距離検出手段とを備える。走行距離検出手段により検出された機体の走行距離Eが設定距離E1に達すると、上昇状態の作業装置を地面まで自動的に下降駆動させる自動下降手段を備える。
(もっと読む)
水田作業車
【課題】水田作業車において、作業装置の昇降に伴って右又は左のマーカーを自動的に作用姿勢に操作するマーカー操作手段、及び、旋回終了位置の検出に基づいて作業装置を自動的に作業状態に操作する作業装置操作手段を備えた場合、マーカー操作手段及び作業装置操作手段を適切に作動及び停止状態に設定することができるように構成する。
【解決手段】マーカー操作手段54及び作業装置操作手段55の両方が作動する作動状態と、マーカー操作手段54及び作業装置操作手段55の両方が停止する停止状態とを設定するもので、人為的に操作される単一の人為操作具46を備える。
(もっと読む)
田植機
【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 操舵ハンドルとオペレータシートを備え、転向車輪と後輪の4輪で駆動する構成とし、機体後部に昇降部を介して昇降可能に植付部を設けた田植機において、旋回時のハンドル操作に基づいて後輪のドライブシャフト回転のカウントを開始し、該カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上でなく、その後、カウントが第二の所定値(n2)になったとき、植付クラッチを入にする連動制御を備え、カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上であれば、連動制御を終了する制御装置を設けた。
(もっと読む)
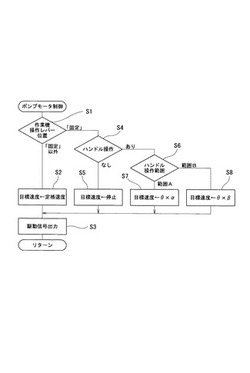
農作業機
【課題】走行中は作溝器が不用意に圃場に作溝跡を作って、圃場を荒らさないようにした農作業機を提供すること。
【解決手段】ハンドル操向角度検出センサ109によりハンドル14が所定値まで操向操作されると制御装置110により、まず作溝器用油圧シリンダ89が作溝位置にある作溝器(溝切り装置)95を非作溝位置まで上昇させ、次いで播種装置用油圧シリンダ46を作動させて作業位置にある播種装置82を非作業位置まで上昇させ、また旋回終了直前又は旋回終了を判断すると、まず播種装置82が作業位置まで下降させ、次いで作溝器95を作溝位置まで下降する作動を行わせることで、作溝器95を播種装置82より先に上昇させて、また上昇した作溝器95を播種装置82より後で圃場に降ろすことで、圃場を荒らしたり、作物を傷めたりすることを防止できる。
(もっと読む)
1 - 20 / 37
[ Back to top ]