
Fターム[2B043EA33]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 圃場の状態 (78) | 圃場又は路面の状態 (57)
Fターム[2B043EA33]の下位に属するFターム
Fターム[2B043EA33]に分類される特許
1 - 14 / 14
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、自由操向可能なキャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることができること。
【解決手段】第1・第2駆動部に要求される必要駆動トルクを算出する駆動トルク算定部と、傾斜横切り走行時における目標走行方向と実走行方向との方向ずれを解消する補償トルクを第1・第2駆動部に対して車両の傾斜度に基づいて算出する補償トルク算定部と、必要駆動トルクと補償トルクとに基づいて制御量を補正する補正部とが含まれている。
(もっと読む)
自走車両

【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
移植機
【課題】電動ステアリング機構と、電動ステアリング機構を介した操向制御を行う制御部を備え、直進走行後に走行機体を旋回させるための操向操作を自動的に行う自動旋回制御を行うにあたり、オペレータの意図に沿って自動旋回制御を実行する移植機を提供することを課題とする。
【解決手段】本発明は、電動ステアリング機構34と、電動ステアリング機構34を介した操向制御を行う制御部21とを備え、制御部21が、直進走行後に走行機体4を旋回させるための操向操作を自動的に行う自動旋回制御を行う移植機であって、走行機体4の旋回方向を選択する操作を検出する操作検出手段を設け、制御部21は、操作検出手段によって旋回方向の選択操作が検出されたことを少なくとも1つの条件とし、畦際での旋回である小回り旋回が可能な切れ角になるまで該選択された旋回方向に電動ステアリング機構34を自動的に操向作動させる自動旋回制御を実行する。
(もっと読む)
乗用型対地作業車両
【課題】乗用型対地作業車両において、車両が傾斜面上を走行する場合でも、運転者が意図する方向への走行を可能とし、さらに、ヨーレートの検出値と目標値との偏差に基づく制御作用時の車両の挙動特性を自由に設定しやすくすることである。
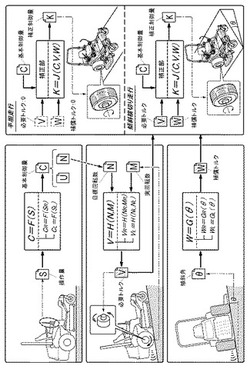
【解決手段】乗用型対地作業車両である芝刈車両10は、コントローラ48と、車両のヨーレートを検出するヨーレートセンサ60とを備える。コントローラ48は、運転者により入力される加速指示及び旋回指示に基づいて左右車輪用電動モータ22,24それぞれの2の目標回転速度指令値を算出し、目標ヨーレートとヨーレート検出値との偏差に基づいて、車輪用電動モータ22,24にそれぞれ関係する2の補正係数を取得し、2の目標回転速度指令値のそれぞれを2の補正係数により補正して、車輪用電動モータ22,24の駆動を制御する。
(もっと読む)
農用作業機
【課題】水田などの走行不安定な圃場において安定走行を実現することができる農用作業機を提供する。
【解決手段】
走行検知手段により走行機体の走行状態を検知し、安定制御手段によりその走行状態と予め設定した走行条件とを比較演算し、もし、設定条件と異なる走行状態である場合、機体を安定制御する信号を走行安定化手段に出力し、その走行安定化手段により機体の走行状態を安定化させるので、水田などの走行不安定な圃場において、スタックなどに陥ることなく安定走行を実現することができる。
(もっと読む)
作業車両
【課題】暗夜や積雪時などで障害物が視認できないときに車体の走行位置をGPS受信装置で受信して、障害物判断処理を実行する制御手段を具備した作業車両を提供する。
【解決手段】地図情報を格納するデータベースD1と、前記地図情報に基づく作業機の位置検出手段及び位置表示手段とを有する作業車両において、作業車両の走行時に、現在の走行位置と、データベースD1に格納された障害物地図情報と比較し、障害物が近づくと警報を発する。また、前記警報時に、障害物の種類と位置を表示する。
(もっと読む)
作業車両
【課題】走行機体に搭載されたエンジンの動力を、油圧式駆動装置を介して左右の走行クローラに伝達するように構成する一方、走行機体の進行方向を変更操作するための操向ハンドルを備える作業車両において、不要であるにも拘らず、操向ハンドルの切り過ぎにて走行機体をスピンターンさせ、圃場を荒らすという問題を解消する。
【解決手段】操向ハンドルを左又は右スピンターン領域に回動操作したときに、操向ハンドルの回動操作に対して抵抗を付与するデテント機構370の作用にて、操向ハンドルの操作感触を「重い」状態にする。
(もっと読む)
移植機
【課題】植付行程終了後に走行機体を自動旋回させるにあたり、直進走行中のスリップなどに起因する距離計測誤差を排除し、旋回開始タイミングのばらつきを可及的に小さくする。
【解決手段】ステアリングホイール24の操作に応じて走行機体1を操向するステアリング機構と、走行機体1に昇降自在に連結される植付部3と、該植付部3に対する動力供給を入切する植付クラッチとを備える乗用田植機において、ステアリング機構をアクチュエータの駆動力で作動させるステアリング作動機構27と、該ステアリング作動機構27を制御する制御装置33とを備えると共に、該制御装置33は、植付部3の上昇操作に基づいて植付けの終了を判断すると共に、植付終了判断後の経過時間に基づいて旋回開始タイミングを判断し、該旋回開始タイミング判断に応じてステアリング機構を自動的に旋回制御する。
(もっと読む)
複数条植え移植機及び複数条植え移植機による植付け方法
【課題】畦クラッチ等による煩雑な植付け条調整操作および植付け条別苗量管理による煩雑な苗補給を要することなく、植付け作業能率の向上とともに機体構成の簡易化を可能とする複数条植え移植機および同複数条植え移植機による植付方法を提供する。
【解決手段】複数条植え移植機は、往復植付け行程による植付け範囲の圃場幅Bをその一側端から所定の植付け条間寸法で且つ所定の植付け条数で複数条植え走行するように構成され、上記圃場幅Bを認識する認識手段と、該認識手段で認識する圃場幅Bを往復植付け行程の行程間ピッチDを前記所定の植付け条間寸法として等間隔に往復植付けするものとした場合に生じる植付け条数に満たない未植付け部分の幅に基づいて、前記圃場幅B全体を植付け条数の整数倍の条数で植付けできるように往復植付け行程の行程間ピッチDを演算する演算手段とを設けたものである。
(もっと読む)
農薬散布用ホバークラフト
【課題】水田用ホバークラフトが操縦者から遠く離れた位置にあっても、的確に当該水田用ホバークラフトに対する操縦が実施できる極めて操作性が良い農薬散布用ホバークラフトを提供する。
【解決手段】本発明に係る農薬散布用ホバークラフト1は、ホバークラフト本体2に農薬用タンク3と散布装置6を装着し、遠隔操作によって散布装置6及びホバークラフト本体2を操作可能としたラジコンホバークラフトにおいて、ホバークラフト本体2後部に構成されるファンダクト11の上部に、船艇前方の映像をコントローラ21上のモニタ22に写すためのCCDカメラ13及び障害物に対する設定距離以上の接近を感知しコントローラ21上のスピーカ23から警告音を発生させる超音波センサー装置14を設けた。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
作業車の画像処理装置
【課題】 列状に並んだ物体を撮影して線分を設定する作業車の画像処理装置において、物体の色相に近い色相を備えた外乱の影響をできるだけ小さくする。
【解決手段】 物体の並び方向と交差する複数の分割線E1により、画像を複数の領域B1に分割する。領域B1の各々において、物体の色相を備えた画素を候補画素として抽出する。領域B1の各々において、複数の候補画素のうち、最上位から所定個数の候補画素G1,G2,G3,G4を選択する。選択された所定個数の候補画素G1,G2,G3,G4に沿って線分を設定する。
(もっと読む)
コンバインのトランスミッション
【課題】湿田での作業走行時に湿田モードとすることにより、走行機体の旋回を乾田作業時と概ね同じ状態で行わせることにより、乾田作業及び湿田作業の何れにおいても走行機体の操縦をスムーズに行うと共に、乾田旋回モードと湿田旋回モードの切り換えを自動的に行うことができるコンバインのトランスミッションを提供する。
【解決手段】旋回クラッチ(43L),(43R)の接続圧力を変更することにより、乾田作業時の乾田旋回モードと湿田作業時の湿田旋回モードとを切り換え可能に構成すると共に、走行機体(1)の設定速度(S)と実質速度(K)との差異を走行時の滑り率として判断する速度差異判断手段を設け、該速度差異判断手段が所定値以上の滑り率と判断した時に、乾田旋回モードと湿田旋回モードとを自動的に切り換える乾湿切換制御手段を設けた。
(もっと読む)
1 - 14 / 14
[ Back to top ]