
Fターム[2B043EB10]の内容
農業機械一般(操向) (6,001) | センサの構成、配置又は取付け (441) | 複数のセンサを有するもの (34) | 異種のセンサを有するもの (16)
Fターム[2B043EB10]に分類される特許
1 - 16 / 16
防除作業機

【課題】圃場に散布される薬剤のばらつきを抑制すること。
【解決手段】圃場に薬剤を散布する防除作業機は、GPS衛星から送信される電波を受信するGPS受信部10と、GPS受信部10から得られる防除作業機の進行方向における位置情報と、前記薬剤の散布幅とに基づいて、防除作業機が旋回した後に圃場の薬剤を散布する領域へ進入する進入位置を求める制御用プロセッサ40を含む制御装置9と、進入位置を表示する表示部11Dと、を含む。
(もっと読む)
自律走行作業車の制御装置

【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
水田除草ロボット
【課題】条間、株間を自由に移動し、且つ、安定した除草効果が得られる除草ロボットを提供する。
【解決手段】水田除草ロボット1は、水田の稲株が通過可能な逆凹状の空間を有したメインフレーム10は、その下部に、車輪19A,19B、車輪19A,19Bを回転駆動する駆動部11A,11B、車輪19A,19Bの前後に配置されて水田除草ロボット1に浮力を生じさせる第1のフロート20A〜20D、全部に設けられて水田内の稲株を検知するセンサレバー23A,23B、メインフレーム10に搭載されたセンサ類に基づいて駆動部11A,11Bを駆動し、車輪19A,19Bの回転を制御する。これにより、水田除草ロボット1は稲株を避けながら自律走行する。
(もっと読む)
作業車両の操縦装置
【課題】操向レバーの旋回操作を制御装置に入力するポジションセンサの故障をいち早く検出して警報を出したり旋回を中止することで安全性を高める。
【解決手段】操向レバー(1)の左右傾倒角度を検出するポジションセンサ(2)と、該ポジションセンサ(2)とは別に操向レバー(1)の左右傾倒状態を検出する左右の旋回スイッチ(3a,3b)を設け、前記ポジションセンサ(2)と旋回スイッチ(3a,3b)の検出値が一致しない場合を故障と判断し、警報或いは走行停止を実行する構成とした。
(もっと読む)
刈取収穫機
【課題】 機体を自動操向操作により走行させながら植立茎稈の刈取作業を行うことが可能でありながら、植立茎稈の刈残し等が発生しない良好な状態で且つ能率よく刈取作業を行うことが可能となる刈取収穫機を提供する。
【解決手段】 対地位置検出手段にて求められる機体の対地位置情報に基づいて機体が作業対象領域内の設定経路に沿って走行するように、機体の向きを変更操作自在な操向操作手段29を制御する制御手段Hが備えられ、その制御手段Hが、設定経路における植立茎稈を刈り取る刈取用経路部分を走行するときに、対茎稈位置検出手段83にて検出される植立茎稈に対する機体の横幅方向の位置が刈取用の適正位置から外れると、対地位置検出手段の検出情報にかかわらず、対茎稈位置検出手段83の検出情報に基づいて機体の横幅方向の位置が適正位置になるように操向操作手段29を制御する。
(もっと読む)
農用作業機
【課題】水田などの走行不安定な圃場において安定走行を実現することができる農用作業機を提供する。
【解決手段】
走行検知手段により走行機体の走行状態を検知し、安定制御手段によりその走行状態と予め設定した走行条件とを比較演算し、もし、設定条件と異なる走行状態である場合、機体を安定制御する信号を走行安定化手段に出力し、その走行安定化手段により機体の走行状態を安定化させるので、水田などの走行不安定な圃場において、スタックなどに陥ることなく安定走行を実現することができる。
(もっと読む)
農薬散布用ホバークラフト
【課題】水田用ホバークラフトが操縦者から遠く離れた位置にあっても、的確に当該水田用ホバークラフトに対する操縦が実施できる極めて操作性が良い農薬散布用ホバークラフトを提供する。
【解決手段】本発明に係る農薬散布用ホバークラフト1は、ホバークラフト本体2に農薬用タンク3と散布装置6を装着し、遠隔操作によって散布装置6及びホバークラフト本体2を操作可能としたラジコンホバークラフトにおいて、ホバークラフト本体2後部に構成されるファンダクト11の上部に、船艇前方の映像をコントローラ21上のモニタ22に写すためのCCDカメラ13及び障害物に対する設定距離以上の接近を感知しコントローラ21上のスピーカ23から警告音を発生させる超音波センサー装置14を設けた。
(もっと読む)
作業車両の自動操縦装置
【課題】 本発明の課題は、手動操縦、自動操縦に関わらず、自動的に切り替えるようにして、従来のような切替操作の煩雑さを解消し、作業能率の向上を図ることにある。
【解決手段】 本発明は、車両(1)の進路を検出するセンサ(21)と、該センサの検出によって車両を操向する操向アクチュエータ(25)を備えた作業車両の自動操縦装置において、前記車両には、操向操作を検出したときには、所定時間に亘り自動操縦を停止し、手動で操縦可能とする制御手段23を備えてあることを特徴とする。
(もっと読む)
作業車両の自動走行制御装置
【課題】畝W等の走行基準体に沿ったトラクタの自動走行制御の精度を向上する。
【解決手段】トラクタ1には進行方向前側部を撮像するステレオカメラ33を設け、トラクタ1の走行動力を前後進にわたり無段変速する逆転用クラッチ18L,18R及び正転用クラッチ19L,19Rを設ける。ステレオカメラ33により畔等の走行基準体を撮像しながら走行し、走行基準体とトラクタとの検出間隔が所定間隔からずれると、所定間隔に復帰するように正転用クラッチ19L,19Rを作動して操舵制御する。またトラクタ1が所定値以上の加速度を検出すると、所定時間にわたり操舵制御を停止する。
(もっと読む)
圃場作業車両
【課題】簡易な構成で信頼性の高い制御部により自律直進操舵制御の不安定化を回避して異常走行を確実に防止することができる圃場作業車両を提供する。
【解決手段】圃場作業車両1は、機体方向を示す機体方位情報9に基づき、別途設定の目標方位に対する機体方位の偏差が小さくなる方向に操向装置の舵角を操作する自律直進操舵制御を行う制御部21を備えて構成され、上記制御部21には、方位偏差の低減に適する走行速度を基準速度として別途設定し、機体の走行速度情報25に基づいて同走行速度が上記基準速度に満たない範囲について上記自律直進操舵制御を強制解除するものである。
(もっと読む)
乗用トラクタの走行速度制御装置
【課題】乗用トラクタや田植機等といった農作業機の車体後部に作業機を連結して農作業を行う場合、圃場端部で旋回する際に該作業機の引き摺りを防止するために、該作業機を所定高さの非作業位置まで上昇させている。例えば乗用トラクタで耕耘作業を行うときに、乗用トラクタが旋回する部分は枕地と称されて未耕耘部分が残り、最終段階で乗用トラクタが枕地を往復して未耕耘部分をなくしている。解決しようとする課題は農作業機において、シンプルな制御装置で枕地耕耘処理の簡略化を可能にすることである。
【解決手段】エンジン5と伝動装置として無段変速装置22と前後進切換装置と作業機の昇降装置とを備えた乗用トラクタ20において、該作業機の昇降装置が最上昇したこと又は該前後進の切換装置が前進から後進に切り替わったことにより、予め設定できる所定速度に減速する。
(もっと読む)
作業車
【課題】 旋回走行の際、前車輪に掛かった抵抗に対応した適切なタイミングで前輪変速装置が前輪増速状態に切り換え操作されるようにする。
【解決手段】 前車輪が後車輪によって押された状態になったことを検出する前輪検出手段51が非検出状態にあると、制御手段50が前輪変速装置20を標準状態に切り換え操作し、前輪変速装置20が前車輪を後車輪と同一又はほぼ同一の駆動速度で駆動する。前輪検出手段51が検出状態になると、制御手段50が前輪変速装置20を前輪増速状態に切り換え操作し、前輪変速装置20が前車輪を後車輪よりも高速で駆動する。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
自律機械
自律機械(10)を作業区域の自由表面の実質的に全てを横切るように、作業区域の方々に自律機械をナビゲートするための制御システムを提供する。制御システムは、機械(10)に作業区域の境界を追従させ、複数の移動を実施させるよう構成されており、各移動は、機械(10)が作業区域の境界から境界に対してある角度で外側へ移動して、境界へ再び戻ることを含む。機械(10)は各移動の間に作業区域の境界に沿って移動し、かつ機械(10)が実質的に作業区域の全境界を追従しながらこれらの移動を繰り返す。 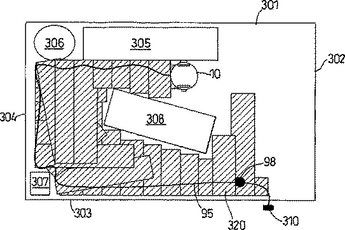 (もっと読む)
(もっと読む)
乗用型作業機
【課題】前輪に対する操向操作を行うだけで、旋回内側の後輪を制動させて旋回を操作性良く行える乗用型田植機があるが、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入切操作や上下動操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性において課題があった。
【解決手段】操向用の左右前輪6・6とエンジン12からの動力を変速する伝動装置からの出力で駆動される左右後輪7・7を備え、左右後輪7・7への駆動を各別に入り切りする左右サイドクラッチI・Iを設けた乗用型作業機おいて、左右前輪6・6を所定の速度以上の速さ又は所定以内の均一な操向速度で所定角度以上に操向操作すると、旋回内側となる後輪7のサイドクラッチIを切り、旋回内側となる後輪7の回転数の検出に基づいて走行距離を算出して、旋回時の諸作業用の作動を自動的に行わせる制御装置170を設けた乗用型作業機。
(もっと読む)
コンバインのトランスミッション
【課題】湿田での作業走行時に湿田モードとすることにより、走行機体の旋回を乾田作業時と概ね同じ状態で行わせることにより、乾田作業及び湿田作業の何れにおいても走行機体の操縦をスムーズに行うと共に、乾田旋回モードと湿田旋回モードの切り換えを自動的に行うことができるコンバインのトランスミッションを提供する。
【解決手段】旋回クラッチ(43L),(43R)の接続圧力を変更することにより、乾田作業時の乾田旋回モードと湿田作業時の湿田旋回モードとを切り換え可能に構成すると共に、走行機体(1)の設定速度(S)と実質速度(K)との差異を走行時の滑り率として判断する速度差異判断手段を設け、該速度差異判断手段が所定値以上の滑り率と判断した時に、乾田旋回モードと湿田旋回モードとを自動的に切り換える乾湿切換制御手段を設けた。
(もっと読む)
1 - 16 / 16
[ Back to top ]