
Fターム[2B043ED22]の内容
農業機械一般(操向) (6,001) | 制御対象 (576) | 流体機器又は電気機器の制御 (64) | ポンプ、モータ又はシリンダ (47)
Fターム[2B043ED22]に分類される特許
1 - 20 / 47
苗移植機
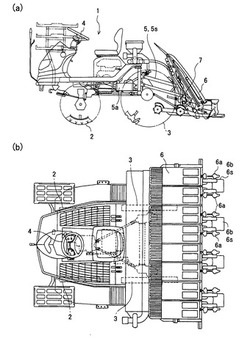
【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
自走車両

【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、自由操向可能なキャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることができること。
【解決手段】第1・第2駆動部に要求される必要駆動トルクを算出する駆動トルク算定部と、傾斜横切り走行時における目標走行方向と実走行方向との方向ずれを解消する補償トルクを第1・第2駆動部に対して車両の傾斜度に基づいて算出する補償トルク算定部と、必要駆動トルクと補償トルクとに基づいて制御量を補正する補正部とが含まれている。
(もっと読む)
作業車両
【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
歩行型農業作業車
【課題】差動装置を備えた歩行型農業作業車のミッションケースを小型化する。
【解決手段】差動装置20は、2つの遊星歯車機構21と、回転自在に設けられたピニオンギア22と、を有する。2つの遊星歯車機構21がそれぞれ有するサンギア23同士は、その回転軸が同一軸線上に配置される。2つの遊星歯車機構21がそれぞれ有するインターナルギア部材27は、ピニオンギア22に噛み合う。2つの遊星歯車機構21がそれぞれ有するサンギア23は、車輪用モータ19の出力軸29に固定される。そして、2つの遊星歯車機構21がそれぞれ有するプラネタリキャリア24から、それぞれ駆動力が取り出される。この構成により、車輪用モータ19の出力軸29と、差動装置20からの出力の取り出し軸(車軸9)と、を同軸に配置することができるので、車輪用モータ19から差動装置20まで駆動を伝達するための部材(チェーン等)が不要となる。
(もっと読む)
防除作業機
【課題】圃場に散布される薬剤のばらつきを抑制すること。
【解決手段】圃場に薬剤を散布する防除作業機は、GPS衛星から送信される電波を受信するGPS受信部10と、GPS受信部10から得られる防除作業機の進行方向における位置情報と、前記薬剤の散布幅とに基づいて、防除作業機が旋回した後に圃場の薬剤を散布する領域へ進入する進入位置を求める制御用プロセッサ40を含む制御装置9と、進入位置を表示する表示部11Dと、を含む。
(もっと読む)
茶園管理機
【目的】 本発明は、茶畝を跨いで走行し、該走行方向を自動操舵することができ、特に、感知機構を固定状として、後進も良好にできるとともに、簡易な構成にできること。
【構成】 茶畝90を跨いだ前側門型フレーム2A及び後側門型フレーム2Bの左右下端に走行装置1,1を備え、茶畝に沿って作業を行う茶園管理機におけること。前側門型フレーム2Aの対向する内側に、平面的に見て左右茶畝側面91,91に接触しつつ中央箇所が茶畝90側に膨出する弧状感知板5と、この内部に設けられた圧力センサとを有する前進用茶樹感知手段Aが備えられていること。左右の弧状感知板5,5に加わる茶畝側面91,91からの接触圧力を測定して、左右それぞれの接触圧力が均等となるよう自動走行制御部Cにて制御して茶畝90に沿って前進自動走行するようにしてなること。
(もっと読む)
乗用型対地作業車両
【課題】乗用型対地作業車両において、車両が傾斜面上を走行する場合でも、運転者が意図する方向への走行を可能とし、さらに、ヨーレートの検出値と目標値との偏差に基づく制御作用時の車両の挙動特性を自由に設定しやすくすることである。
【解決手段】乗用型対地作業車両である芝刈車両10は、コントローラ48と、車両のヨーレートを検出するヨーレートセンサ60とを備える。コントローラ48は、運転者により入力される加速指示及び旋回指示に基づいて左右車輪用電動モータ22,24それぞれの2の目標回転速度指令値を算出し、目標ヨーレートとヨーレート検出値との偏差に基づいて、車輪用電動モータ22,24にそれぞれ関係する2の補正係数を取得し、2の目標回転速度指令値のそれぞれを2の補正係数により補正して、車輪用電動モータ22,24の駆動を制御する。
(もっと読む)
門型たばこ栽培作業機
【課題】左右のクローラを駆動して走行する門型たばこ栽培作業機について、エンジンの回転速度の如何に関わらず、超微速で長時間安定走行させることができ、作業機の始動、停止を緩慢に、安定的に行えるように、その走行伝動機構を工夫する。
【解決手段】左右の走行フレームのいずれか一方に搭載されている動力部が互いに一体の斜板ポンプと斜板モータによる油圧減速機によるものであり、斜板ポンプをガソリンエンジンで直接駆動するようになっており、動力分配機が左右の出力スプロケットを等速で駆動する駆動手段であり、変速レバーは上記斜板ポンプを操作して上記斜板モータを変速させ、また正逆転させるものであり、上記左右のクラッチレバーは上記左右の操向クラッチを操作するものであり、左右のブレーキペダルは上記左右のブレーキを操作するものである。
(もっと読む)
移動農機
【課題】簡素な構成によって直進性を確保することを可能にした油圧式無段変速装置を備えた移動農機を提供する。
【解決手段】クローラトラクタは、ステアリングホイールが中立位置にされると、斜板式可変容量ポンプ37rの前進側斜板操作ポート37raと斜板式可変容量ポンプ37lの前進側斜板操作ポート37la、斜板式可変容量ポンプ37rの後進側斜板操作ポート37rbと斜板式可変容量ポンプ37lの後進側斜板操作ポート37lbをそれぞれ連通するバイパスバルブ35を備えている。これにより、左右の斜板式可変容量ポンプ37r,37lに入力される制御圧が等しくなるので、直進性を確保することができる。
(もっと読む)
作業車の最高速度制御機構
【課題】変速アクチュエータを駆動制御して移動速度を変更する構成において、最高移動速度を制限する最高速度設定器を備えることにより、操作性および走行性の良い作業車の最高速度制御機構を提供する。
【解決手段】エンジン5が搭載された走行機体3と、無段変速装置と、変速ペダル16(変速操作具)と、変速ペダル(変速操作具)の操作量に基づいて無段変速装置を変速制御する変速アクチュエータと、を備えた田植機1において、変速ペダル(変速操作具)を最大に操作したときの最高移動速度を制限する最高速度設定器を設け、路上走行または走行機体の傾動によって、最高移動速度を制限可能に構成した田植機(作業車)の最高速度制御機構である。
(もっと読む)
作業車
【課題】直接操作又は遠隔操作で走行可能であり、この直接操作と遠隔操作とを作業状況に応じて正確に切り替えて、走行操作の操作性の向上を図ることができる作業車を提供する。
【解決手段】エンジン5の出力を走行装置に伝達する無段変速装置21と、変速ペダル16により無段変速装置21の変速比を変更する変速アクチュエータ60と、変速アクチュエータ60を遠隔操作可能なリモコン91と、リモコン91を保持可能なリモコンホルダ92と、リモコン91がリモコンホルダ92により保持されているかを検知する着脱センサ93と、着脱センサ93によりリモコン91がリモコンホルダ92に保持されていると検知された場合、変速ペダル16による直接操作を優先する制御を行い、着脱センサ93によりリモコン91がリモコンホルダ92に保持されていないと検知された場合、リモコン91による遠隔操作を優先する制御を行う制御装置80を備える田植機1。
(もっと読む)
コンバイン
【課題】可変容積型油圧ポンプ及び可変容積型油圧モータを有する走行用HSTと機械式の多段変速装置とが走行系伝動経路に直列的に介挿され、前記走行用油圧モータが走行モード切替操作部材への人為操作に基づき選択的に小容積状態又は大容積状態とされるコンバインにおいて、低速走行させる必要がある場合における走行安全性を向上させる。
【解決手段】制御装置は、副変速検出センサからの信号に基づき前記多段変速装置が最低速段に係合していると判断する場合には、前記走行モード切替操作部材からの人為操作信号に拘わらず前記走行用油圧モータが大容積状態となるように走行モード切替作動機構を強制的に作動制御する。
(もっと読む)
作業機等の油圧制御回路
【課題】油圧制御ブロックを小さなブロックで分離可能にしてメンテナンスの能率を高める。
【解決手段】左側走行装置の駆動と制動を左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lで制御し、右側走行装置の駆動と制動を右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rで制御する回路であって、左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lを制御する左クラッチ切換電磁弁14Lと左パイロット圧切換電磁弁16Lと左電磁比例弁17Lを一体に組み込んだ左油圧制御ブロック35Lと、右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rを制御する右クラッチ切換電磁弁14Rと右パイロット圧切換電磁弁16Rと右電磁比例弁17Rを一体に組み込んだ右油圧制御ブロック35Rを各別の回路にする。
(もっと読む)
車軸駆動装置
【課題】車軸駆動装置のケースは、一対の出力軸、差動機構、モータをともに収納するので、形状が複雑である。また、上下二つのケース半部同士も共通の形状とすることができない。そのため、なおもコスト高になる。
【解決手段】車軸駆動装置10にて、両出力軸4L・4Rを収納するケース70を設け、ケース70は、略同一のケース半部の一対を、互いに上下左右反転した状態で左右に結合してなり、接合した両ケース半部は、それぞれで各出力軸4L・4R及び入力軸162を軸受しており、左右各ケース半部の外側には、それぞれ各モータ21a・22aを装着し、各モータ21a・22aのモータ軸161・160をモータ連結用継手部分に連結した。
(もっと読む)
走行車両
【課題】走行機体を支持する左右の走行部に動力伝達する直進走行用変速装置と,前記左右の走行部に動力を逆回転伝達する旋回走行用変速装置と,前記直進走行用変速装置の変速用操作具と,前記旋回走行用変速装置の旋回用操作具を備えて成る走行車両において,その直進及び旋回走行の操作性を簡単で小型の機構にて向上する。
【解決手段】旋回用操作具にて回転する旋回入力軸72に,変速制御体81を変速軸線Xの回りに回転自在に設けるとともに,旋回制御体82を前記変速軸線Xに直交する旋回軸線Yの回りに設けて,前記変速用操作具に連動してその各々における軸線の回りに傾き回転する構成にし,前記変速制御体に設けた円形カム81aに摺動自在に係合する変速用滑り子部材97により前記直進走行用変速装置を変速作動し,前記旋回制御体に設けた円形カム82aに摺動自在に係合する旋回用滑り子部材106により前記旋回走行用変速装置を変速作動する。
(もっと読む)
作業車両
【課題】安全性、旋回性能および作業環境を向上させたトラクタなどの作業車両を提供する。
【解決手段】キャビン6とミッションケース23との間に防振部材10を有し、ステアリングホイール9の操向および操向量を、車両上下方向から車両前後方向に変換するクランク機構111を有するリンク機構100を備え、このリンク機構100によって旋回用HSTポンプ72を操作し、車両を旋回させ、クランク機構111を、ミッションケース23側部に備える。また、クランク機構111の、弾性部材112を内挿する左アーム111cの接続部111dの両端部に、前後ロッド105を接続する。
(もっと読む)
乗用型作業機
【課題】クローラ操向方式の乗用型農作業機において、走行機体の旋回に際して左右のクローラを同じ方向に周回させるノーマルモードと逆方向に周回させるスピンターンモードとの切り替えを行う構成を簡素化する。
【手段】操縦ケース24の内部に筒状の変速出力軸115が回転可能に配置されている。変速出力軸115の内部にはクラッチ軸149がスライド自在に嵌め込まれており、変速出力軸115の外側には、ノーマルモード用の減速出力軸とスピンターンモード用の直結出力軸とが相対回転可能に嵌まっている。クラッチ軸149には、変速出力軸115の窓穴155の箇所に位置する2条の環状凹所156,157が形成されており、変速出力軸115には、環状凹所156,157に嵌脱するストッパー部160を有する板ばね158が固定されている。
(もっと読む)
走行車両
【課題】エンジンの動力を、直進用及び旋回用HST式無段変速機構25,28並びに差動機構を介して左右の走行クローラに伝達するように構成する一方、主変速レバー73と回動操作式の操向ハンドル10とを備えている走行車両において、走行機体1が前後進のいずれの状態であっても、操向ハンドル10の回動操作方向と走行機体1の旋回方向とを一致させるようにする。
【解決手段】操向ハンドル10から旋回用HST式無段変速機構28への操作力伝達経路に、主変速レバー73の操作状態に応じて、操向ハンドル10からの操作力を正逆回転及び中立の3段階に切換可能な操作力切換機構100を配置する。
(もっと読む)
作業車
【課題】隣接耕合せの作業性を向上することができ、耕耘作業の作業性を向上することができる作業車を実現する。
【解決手段】走行車体1の向きを検出する向きセンサ39,40と、走行車体1に右又は左の旋回指令を入力する旋回指令入力部37と、旋回指令入力部37によって旋回指令が入力されると、向きセンサ39,40の検出結果に基づいて、旋回指令入力部37により入力された右又は左に前輪3を操向操作し予め設定された旋回目標角度に走行車体1を自動旋回させる自動旋回制御手段と、旋回目標角度を変更調節可能な旋回目標角度調節具42とを備えて、作業車を構成する。
(もっと読む)
1 - 20 / 47
[ Back to top ]