
Fターム[2B076EA04]の内容
収穫機本体(機枠、駆動) (12,770) | 駆動機構の自動制御 (620) | 複数の検出対象→複数の制御対象 (61)
Fターム[2B076EA04]に分類される特許
21 - 40 / 61
コンバイン
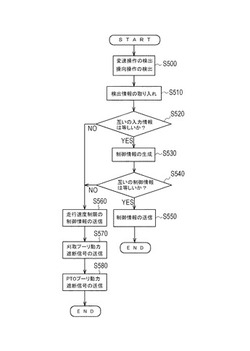
【課題】変速または操向操作検出手段と、制御装置と、に関わる何らかの異常が生じた場合は、安全な退避走行を可能とし、脱穀作業等については継続することができるコンバインを提供する。
【解決手段】第一変速操作検出手段141aと第一操向操作検出手段151aの検出情報に基づく入力情報に応じて制御情報を生成して、走行用の油圧式無段変速装置40と操向用の油圧式無段変速装置50とを制御可能とする第一制御装置200と、第二変速操作検出手段141bと第二操向操作検出手段151bの検出情報に基づく入力情報に応じて制御情報を生成する第二制御装置300とを備え、それぞれの入力情報と制御情報とを互いに比較するとともに、それぞれの作動状態を判定し、一方が一致しない場合は、走行速度を制限するように前記走行用ならびに前記操向用の油圧式無段変速装置を制御して、各作業部の駆動を制限するように制御した。
(もっと読む)
コンバイン

【課題】変速または操向操作検出手段と、これらの操作に基づいて油圧式無段変速装置を制御する制御装置と、に関わる何らかの異常が生じた場合は、走行を即座に停止することができるコンバインを提供することを目的とする。
【解決手段】第一変速操作検出手段141aと第一操向操作検出手段151aの検出情報に基づく入力情報に応じて制御情報を生成して、走行用の油圧式無段変速装置40と操向用の油圧式無段変速装置50とを制御可能とする第一制御装置200と、第二変速操作検出手段141bと第二操向操作検出手段151bの検出情報に基づく入力情報に応じて制御情報を生成する第二制御装置300とを備え、それぞれの入力情報と制御情報とを互いに比較するとともに、それぞれの作動状態を判定し、一致しない場合は、前記走行用の油圧式無段変速装置40ならびに前記操向用の油圧式無段変速装置50を制御して走行を停止するようにした。
(もっと読む)
コンバイン
【課題】エンジンの回転低下によって、収穫作業能率が著しく低下するのを防止できるものでありながら、扱胴の回転数が低下するのを防止できるようにしたコンバインを提供する。
【解決手段】走行部2を有する走行機体と、走行機体に搭載したエンジン20と、走行部にエンジン20の出力を伝達する走行変速機42,43と、刈取装置3と、扱胴226を有する脱穀装置5を備え、エンジン20の動力を扱胴226に伝達する駆動経路中に扱胴調速手段74を設けたコンバインにおいて、エンジン20の回転数の検出結果に基づき、走行変速機42,43の変速出力を変更することなく、扱胴調速手段74を増減速制御して扱胴226の回転数を維持するように構成する。
(もっと読む)
刈取収穫機
【課題】走行機体に刈取部が上昇非作業高さと下降作業高さとに昇降操作自在に連結され、走行機体の走行装置を変速駆動する走行変速装置を備えた刈取収穫機において、刈取部の接地トラブルを回避しながら高速移動されるようにする。
【解決手段】刈取部の走行機体に対する連結高さを検出する連結高さセンサ61、走行変速装置7が設定低速位置から増速操作されることを牽制する牽制作用状態と、走行変速装置が設定低速位置から増速操作されることを許容する牽制解除状態とに切り換え自在な変速牽制手段77を備えてある。刈取部が設定連結高さより高い連結高さに位置する状態において変速牽制手段77が牽制解除状態に切り換わり、刈取部が設定連結高さ以下に位置する状態において変速牽制手段77が牽制作用状態に切り換わる。
(もっと読む)
作業機械
【課題】エンジン70の高出力によって低負荷出力の作業部8が作動するのを阻止し、製造コストを低減できるものでありながら、エンジン70の燃費を向上できるようにした作業機械を提供するものである。
【解決手段】コモンレール120付きエンジン70を搭載し、エンジン70の出力によって作業部2,5,8を駆動するように構成してなる作業機械において、負荷が異なる複数の作業部2,5,8を備える構造であって、低負荷出力の作業部8を作動させるときには、高負荷出力の作業部2,5を作動させるときよりも低出力側に、エンジン70の最高出力が制限されるように構成している。
(もっと読む)
刈取収穫機
【課題】走行機体に刈取部が上昇非作業高さと下降作業高さとに昇降操作自在に連結され、刈取部に対する伝動を入り切りする刈取クラッチ、走行機体の走行装置を変速駆動する走行変速装置を備えた刈取収穫機において、移動走行を行なう作業形態を採用して作業を行うに当たり、能率よくかつ操作簡単に行なうことができるようにする。
【解決手段】刈取クラッチ17と走行変速装置7とを連係させた連係手段71を備えてある。連係手段71は、刈取クラッチ17を入り状態に切り換える操作によって走行変速装置7を設定高速位置から減速操作させる。
(もっと読む)
コンバインの走行制御装置
【課題】枕地での旋回の際にも脱穀装置を適正に駆動し、しかも、枕地での旋回を走行用の駆動力の不足を避けた状態で適切に行えるコンバインの走行制御装置を提供する。
【解決手段】走行用の静油圧式無段変速装置7の油圧モータ7Mにおける容量変更用の操作部7Maを設定目標位置に維持させるように、その操作部7Maが低速側に移動するのを高速側に移動操作する操作力にて保持する保持手段56の操作力を変更調整する操作力調整手段58作動を制御する操作力調整処理を実行する制御手段79が、刈取作業状態検出手段Uにて刈取作業状態から非刈取作業状態切り換ったことが検出されたのちにおいては、操作部7Maが設定目標位置よりも低速側に移動しても、刈取処理直後用の設定上限値を超えて保持手段56の操作力を増加させない形態にて操作力調整手段58の作動を制御する刈取処理直後用の操作力調整処理を実行するように構成されている。
(もっと読む)
コンバイン
【課題】クローラ走行跡に水が溜まり難くして、クローラ走行跡の土壌の軟弱化を防止し、圃場の走行性を向上させる。
【解決手段】左右一対のクローラ走行装置17を備えるコンバイン1において、各クローラ走行装置17の後方に、圃場のクローラ走行跡に排水用の溝を形成する溝切装置24を設ける。これにより、クローラ走行跡に確実に排水用の溝を形成することができ、その結果、クローラ走行跡に水が溜まり難くなる。また、溝切装置24は、機体に対して昇降可能に設けると共に、前処理部2の昇降に連動して自動的に昇降制御される。これにより、オペレータの操作負担を軽減できるだけでなく、圃場端で機体を回行するときに溝切装置24が破損する不都合も回避できる。
(もっと読む)
コンバインの変速制御装置
【課題】刈取処理装置に残っている穀稈を脱穀装置に供給すること、並びに、引き起こされながら株元が切断された直後の穀稈を刈取処理装置に保持させる状態にすることのいずれも良好に行なうことができるコンバインの変速制御装置を提供する点にある。
【解決手段】刈取処理装置4を駆動する駆動指令を指令する駆動指令状態と刈取処理装置4の駆動指令を解除する解除指令を指令する指令解除状態とに切り換え自在な手動操作式の刈取駆動指令手段Jにて駆動指令が指令されている場合には、刈取処理装置4を設定目標駆動速度Mで駆動するように変速手段Zを変速操作する非連係変速処理を実行する変速手段Hが、設定目標駆動速度Mとして、刈取駆動指令手段Jにて解除指令が指令されている状態から駆動指令が指令される状態に変化した直後の初期時間においては、それ以後の定常目標速度よりも高速の初期目標速度を定めるように構成されている。
(もっと読む)
コンバインの変速制御装置
【課題】枕刈作業において刈取処理装置に残っている穀稈を脱穀装置に供給すること並びに走行停止または微低速にて走行するときに穀稈を引き起こし刈取処理することを適正に行えるコンバインの変速制御装置を提供する点にある。
【解決手段】刈取駆動指令手段Jにて駆動指令が指令されている場合には、刈取処理装置4を設定目標駆動速度Mで駆動するように変速手段Zを変速操作する非連係変速処理を実行する変速制御手段Hが、設定目標駆動速度Mとして、刈取処理装置4における刈取穀稈を脱穀装置5に搬送する穀稈搬送経路の始端側箇所における穀稈の存否を検出する穀稈存否検出手段50にて穀稈が検出されているときの穀稈存在用目標速度M1と穀稈存否検出手段50にて穀稈が検出されていないときの穀稈非存在用目標速度M0とを、穀稈存在用目標速度M1を穀稈非存在用目標速度M0よりも低速とする状態で定める。
(もっと読む)
作業機械用の制御装置
【課題】書き込み可能な不揮発性の記憶手段の個数の削減によって構成の簡素化を図りコスト低減を図ることが可能となる作業機械用の制御装置を提供する。
【解決手段】通信手段TUを介して互いに通信可能な複数の制御部が機械各部に分散配備され、複数の制御部のうちのいずれかの制御部が書き込み可能な不揮発性の記憶手段を備える情報管理用の制御部H1として構成され、情報管理用の制御部H1が、電源投入により起動した後に、通信手段TUを介して記憶手段50に記憶している制御管理用情報を記憶対象制御部H2〜H6に送信する制御管理用情報分配処理を実行するように構成され、記憶対象制御部H2〜H6の夫々が、電源投入により起動した後に、情報管理用の制御部H1から通信手段TUを介して送信される自己についての制御管理用情報を受信する制御管理用情報取得処理を実行する。
(もっと読む)
作業車の操作制御装置
【課題】作業クラッチを誤って入り操作することを抑制して、エンジンの始動を良好に行えるようにし、しかも、エンジンを起動しない状態でのメンテナンス作業を良好に行える作業車の操作制御装置を提供する。
【解決手段】操作制御手段Cが、作業指令手段25にて作業開始指令が指令されたときに、起動状態検出手段100にてエンジン起動状態が検出されていると、作業クラッチを入り状態に操作する作業モードに切り換り、かつ、起動状態検出手段100にてエンジン起動状態が検出されていないと、作業モードに切り換らないように構成され、且つ、起動状態検出手段100にてエンジン起動状態が検出されていないときに、補助指令手段50による補助作業指令が指令されると、作業モードに切り換るように構成されている作業車の操作制御装置。
(もっと読む)
コンバイン
【課題】前処理部の瞬間的な動力不足を防ぐことにより、エンジンの排気量を小さくしてコストダウンを図ると共に、燃料消費量を抑える。
【解決手段】エンジンEの動力を走行変速装置(走行用無段変速装置11及びミッションケース12)を介して走行部7に伝動する走行動力伝動経路14と、走行動力伝動経路14から取り出した車速連動の動力を前処理部2に伝動する前処理動力伝動経路15とを備えるコンバイン1であって、前処理動力伝動経路15中に、前処理部2の駆動をアシストする電動アシストモータ17を設ける。
(もっと読む)
コンバイン
【課題】作業中における騒音及び燃料の削減を図る。
【解決手段】少なくとも走行部7及び脱穀部3をエンジンEの動力で動作させるコンバイン1であって、エンジンEの回転数を調整するエンジン回転調整手段32と、脱穀部3に伝動するエンジン動力を無段階に変速する脱穀用無段変速装置25と、エンジン回転調整手段32及び脱穀用無段変速装置25を電気的に制御する制御装置33とを備え、該制御装置33は、作業中であっても、車速の増減に応じてエンジン回転数を増減させると共に、エンジン回転数の増減に拘わらず脱穀部回転数が一定となるように脱穀用無段変速装置25を制御する。
(もっと読む)
コンバインの脱穀・刈取クラッチ制御装置
【課題】従来のものでは、スイッチ操作を前後左右に揺動操作する脱穀・刈取クラッチレバーによりおこなっているため、限られた運転席まわりのスペースの中で他のレバーやスイッチの操作性や操作頻度を考慮してレイアウトするために妥協を強いられていた。
【解決手段】脱穀クラッチ(32)および刈取クラッチ(47)の両方が切断している状態で一方のスイッチ(SW1)を操作することにより、脱穀クラッチ(32)および刈取クラッチ(47)の両方を接続状態に制御し、脱穀クラッチ(32)および刈取クラッチ(47)の両方が切断している状態で他方のスイッチ(SW2)を操作することにより、脱穀クラッチ(32)のみ接続状態に制御する。
(もっと読む)
脱穀機
【課題】刈取部にて刈取った穀桿を脱穀部に搬送している状態にあるのか(刈取モード)、手刈りした穀桿を搬送している状態にあるのか(手扱モードという)、又は穀桿の脱穀部への搬送を行っていない状態にあるのか(待機モード)を判断し、各モードに応じて、穀桿から分離した穀粒及び塵埃を選別する選別部での選別精度を機械的及び自動的に調整し、ロス量を低減させる。
【解決手段】排桿量に応じて機械的に回動する回動レバー52に、サーボモータ70を連結する。刈取スイッチ、脱穀スイッチ、穀桿センサ及び速度センサから出力された信号をコントローラに入力して、入力された信号に基づいて、刈取モード、手扱モード又は待機モードを判断する。コントローラは、各モードに応じてサーボモータ70を作動させて、機械的及び自動的に回動レバー52を回動させる構成とした。
(もっと読む)
脱穀機
【課題】品種及び圃場条件に対応した脱穀作業を行い、穀粒の選別精度の向上と、塵埃と共に排出される穀粒量(ロス量)の低減との調和を図ることができる脱穀機を提供する。
【解決手段】コンバインの速度及び最低限確保されるべきフィン角の関係を示す複数の関数から一の関数を選択するためのボリュームスイッチを設け、ユーザがボリュームスイッチを操作して、品種及び圃場条件に対応した一の関数を選択する。選択された関数を参照して、コンバインの速度に基づいて回動レバー52を動作させ、フィン角rを調整し、吸気口55を開閉するシャッタ57の動作を調整する構成とした。
(もっと読む)
脱穀機
【課題】穀粒の選別精度の向上とロス量の低減との調和を図り、また穀粒を検出する手段に不具合が発生した場合でも、穀粒及び塵埃の選別をするフィン同士の間隔及び唐箕の風量の調節を継続して行うことができる脱穀機を提供する。
【解決手段】コンバインの速度及び許容ロス量の関係を示す複数の関数から一の関数を選択するためのボリュームスイッチを設け、選択された関数を参照して、ロスセンサにより検出されたロス量が前記許容ロス量以上であるか否か判断し、ロス量が前記許容ロス量以上である場合に、前記サーボモータ70を動作させて、ロス量を減少させる。またサーボモータ70が動作しない場合には、排桿の押圧による排ワラガイド棒51、ばね体54及び回動レバー52等の動作により、フィン18a同士の間隔及び唐箕の風量の調節を継続する構成とした。
(もっと読む)
芝管理用車両全輪駆動システム
【課題】芝管理用車両の全輪駆動牽引制御システムで、タイヤのスリップを防止するシステム。
【解決手段】芝管理用車両10の全輪駆動牽引制御システム110が、車両を推進させる主輪を含む。第1モータが、主輪34,34’を回転させる。牽引制御システムは、第1モータ80電流要求または主輪もしくは第1モータの回転速度のいずれかを監視する第1モータと通信する第1部分を有し、牽引制御値を生成する。第2モータ90によって回転させられる副輪28は、車両を、車両非スリップ状態で操舵する。牽引制御システムの第2部分が、副輪の操舵角αの値を決定する。牽引制御値と比較され、牽引制御システムに記憶される速度限界値が、主輪牽引力損失事象を示すスリップ発生メッセージを生成する。操舵角の値とスリップ発生メッセージとを比較することによって生成された第2モータ駆動信号が、牽引力損失事象中、第2モータに電力供給する。
(もっと読む)
作業機
【課題】 作業場所の状況に応じて効率的に機体の昇降制御を行う作業機を提供する。
【解決手段】コンバイン(作業機)は、刈取部(作業部)と、この刈取部を昇降させるための刈取部昇降シリンダと、機体の左右両側に配置されるクローラ走行部と、クローラ走行部の接地面に対して機体を昇降させるために当該機体の左右に配置される機体昇降シリンダと、刈取部の昇降操作及び前記機体の前後進操作が可能な操作部と、を備える。また、コンバインは、操作部の操作に応じて刈取部昇降シリンダ、クローラ走行部及び機体昇降シリンダを制御する制御部を備える。制御部の制御モードは、切換スイッチにより、第1制御モードと第2制御モードとの間で切換可能である。制御部は、刈取部の上昇操作及び機体の後進操作の両方が検出された場合は、第1制御モードでは機体上昇制御及び機体の後進制御を行い、第2制御モードでは機体を上昇させずに後進制御を行う。
(もっと読む)
21 - 40 / 61
[ Back to top ]