
Fターム[2B076EA04]の内容
収穫機本体(機枠、駆動) (12,770) | 駆動機構の自動制御 (620) | 複数の検出対象→複数の制御対象 (61)
Fターム[2B076EA04]に分類される特許
41 - 60 / 61
コンバイン
【課題】刈取部のプラットホーム内に配置された横送りオーガを個別に駆動することができるコンバインを提供する。
【解決手段】
本機を走行させる走行部と、同走行部により走行しながら穀稈を刈り取る刈取部とを装備するコンバインにおいて、前記刈取部に、刈取穀稈を取り込むプラットホームオーガを設けて、同プラットホームオーガに駆動用の電動モータを設けているので、横送りオーガを個別に駆動することができ、横送りオーガ駆動系の部品を少なくして、同駆動系を簡単化することができる。また、横送りオーガをメンテナンスしたい場合などの作業性が向上する。
(もっと読む)
作業車の姿勢制御装置

【課題】機体本体の傾斜角の変更操作を適切に行うことができる作業車の姿勢制御装置を提供する。
【解決手段】機体本体の左右傾斜角及び前後傾斜角を変更操作自在な姿勢変更操作手段が、機体本体における左側前部、左側後部、右側前部、及び、右側後部の夫々において走行装置の接地部に対する高さを各別に変更調節自在な4個の駆動手段を備え、姿勢制御手段が、4個の駆動手段のうちの2個の駆動手段を駆動停止させた状態で、且つ、その駆動停止させた2個の駆動手段夫々の走行装置の接地部に対する各高さ位置を含む基準平面KHを設定して、他の2個の駆動手段を基準平面KHからの各操作量が同じになるように駆動操作することにより、4個の駆動手段の走行装置の接地部に対する各高さ位置にて平面を形成する状態を維持させる平面維持姿勢変更作動を実行するように構成されている。
(もっと読む)
移動農機
【課題】デモンストレーション動作を自動で行うことによって、集客及び点検の容易な移動農機を提供する。
【解決手段】コンバインのマイコン50は、データ読出し手段51及び動作データを格納したデータ格納手段52を有し、こぎ深さ自動スイッチ46を押しながらエンジンを始動させることによって、通常モードから設定モードへと切換わる。データ格納手段52は機体各部ごとに個別に形成されており、説明者は作動箇所を適宜選択して、データ読出し手段51にデータ格納手段52から動作データを読出させる。マイコン50に読出された動作データが各種スイッチ及びセンサから入力されたとみせかけて、こぎ深さ駆動モータ56、搬送駆動モータ58、前処理昇降ソレノイド12a、オーガ旋回モータ36などのアクチュエータを制御し、機体を動作データ通りに作動させる。
(もっと読む)
作業車の姿勢制御装置
【課題】 車体が旋回走行している状態において走行安定性が低下するおそれを少ないものにしながら、精度よく車体の前後傾斜角を検出して、姿勢変更操作手段による車体の前後傾斜方向での作動制御を良好に行えるようにする。
【解決手段】 前後傾斜角センサ24の検出値のうちの高周波数成分を除去した後の検出値と角速度センサ25の検出値を積分した積分値のうちの低周波数成分を除去した後の積分値とを加算して車体Vの前後傾斜角を求める傾斜角算出手段300を備えて構成され、車体Vが旋回走行状態であることが検出されると、下降傾斜作動を実行し且つ上昇傾斜作動を実行しない形態で、車体Vの水平基準面に対する前後傾斜角が前記設定傾斜角になるように姿勢変更操作手段の作動を制御する下降操作限定処理を実行する。
(もっと読む)
作業車の姿勢制御装置
【課題】 目標傾斜角を所望の傾斜角に調整する操作を煩わしさの少ない状態で容易に行うことが可能となる作業車の姿勢制御装置を提供する。
【解決手段】 走行装置に対する車体Vの傾斜姿勢を変更操作自在な姿勢変更操作手段100が備えられ、姿勢変更制御の実行中において、姿勢変更指令手段60,61にて姿勢変更指令が指令され、その指令が終了すると、指令が終了してから設定待機時間が経過するまでの間車体Vの傾斜姿勢の変更操作を停止させたのち姿勢変更制御を再開するように姿勢変更操作手段100の作動を制御し、且つ、姿勢変更指令の指令が終了したときから設定待機時間よりも短い時間に設定された出力安定化時間が経過したのち設定待機時間が経過するまでの間において、傾斜角検出手段23の検出情報に基づいて目標傾斜角を設定する。
(もっと読む)
作業車の姿勢制御装置
【課題】 走行装置に対する車体の傾斜角を変更させたのちに基準状態に戻すことを、操作の煩わしさの少ない状態で且つ的確に行えるようにする。
【解決手段】 走行装置の接地部に対する車体の姿勢を変更操作自在な姿勢変更操作手段100の作動を制御する姿勢制御手段200が、姿勢変更指令手段400にて姿勢変更指令が指令されると、その姿勢変更指令に基づいて姿勢変更操作手段100を作動させ、指令が終了すると作動を停止させるように構成され、基準状態指令手段64にて基準状態指令が指令されると、基準状態になるように姿勢変更操作手段100の作動を開始し、且つ、姿勢変更指令の指令が終了したのちも基準状態になるまで姿勢変更操作手段100を継続して作動させる形態で姿勢変更操作手段100の作動を制御する。
(もっと読む)
作業車の操作制御装置
【課題】 エンジンの始動状態から作業を行うときの操作の簡略化を図ることができる作業車の操作制御装置を提供する。
【解決手段】 操作制御手段Cが、作業指令手段25にて作業開始指令が指令されると、アクセル手段63を前記定格回転状態に操作し且つ作業クラッチ14を前記入り状態に操作するように構成されている作業車の操作制御装置。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】 刈取部が水平基準面に対して傾斜しながら刈取走行する場合であっても、刈取部が地面に接触することを回避することが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】 刈取部の対地高さが目標対地高さになるように昇降操作手段C1を制御する刈取昇降制御、並びに、刈取部の水平基準面に対する傾斜角が目標傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段Hが、刈取昇降制御として、目標傾斜角設定手段50にて設定された目標傾斜角が、刈取部が水平姿勢又はそれに近い姿勢に対応する設定範囲を外れている場合には、刈取部が目標傾斜角になったと仮定したときに、下位側に位置する対地高さ検出手段Aについての目標対地高さとして、目標対地高さ設定手段54にて設定された目標対地高さを設定量高い側に補正した補正目標対地高さを定める目標高さ補正処理を実行する。
(もっと読む)
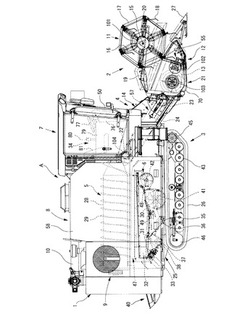
収穫機
【課題】圃場の作物の性状又は収穫作物の性状等に適応した最適な回転数で搬送手段を作動でき、収穫作業性を向上できるようにした収穫機を提供するものである。
【解決手段】走行部2を備えた走行機体と、収穫作物を搬送する複数の搬送手段6,223,224,234とを備えてなる収穫機において、前記複数の搬送手段6,223,224,234毎に、それら搬送手段6,223,224,234を作動する複数の電動モータ90,92,93,94を備え、各電動モータ90,92,93,94によって各搬送手段6,223,224,234を個別にそれぞれ作動するように構成したものである。
(もっと読む)
コンバインの駆動制御装置
【課題】 エンジンの始動状態から刈取作業を行うときの操作の簡略化を図ることができるコンバインの駆動制御装置を提供する。
【解決手段】 制御手段Hが、作業指令手段Iにて作業開始指令が指令されると、アクセル手段42を定格回転状態にかつ脱穀クラッチ12を入り状態にする運転起動状態にすべく、切換操作用駆動手段Mの作動を制御するように構成され、且つ、運転起動状態において、運転状態検出手段Jの検出情報に基づいて刈取作業開始条件が満たされていることを判別すると、刈取クラッチ10を入り状態にし、かつ、運転状態検出手段Jの検出情報に基づいて刈取作業開始条件が満たされていないことを判別すると、刈取クラッチ10を切り状態にすべく、切換操作用駆動手段Mの作動を制御するように構成されている。
(もっと読む)
コンバイン
【課題】本発明では、燃料消費量からエンジンの負荷状態を検出して負荷を一定にすべく走行速度を変更し、コンバインの脱穀処理性能を低下させずに燃料消費量を少なくすることを課題とする。
【解決手段】機体の走行速度を制御する走行速度制御手段(2)と、負荷に応じて燃料供給量を調整してエンジン(3)の出力を制御するエンジン制御手段(4)と、リアルタイムで燃料供給量を検出する燃料供給量検出手段(5)とを設ける。そして、燃料供給量検出手段(5)によって検出される燃料消費量が所定範囲内に収まるように、前記走行速度制御手段(2)によって走行速度を制御する燃費制御手段(6)を設ける。
(もっと読む)
コンバインの制御装置
【課題】コンバインの機能に異常が生じた場合に従来より安全性の高い、分かり易い異常表示方式を提供することである。
【解決手段】コンバインの各種機能の入り切り操作スイッチ(30〜32等)と、その操作状態を表示する各スイッチランプ(30a〜32a等)と、各入り切り操作スイッチ(30〜32等)による操作状態に基づき各スイッチランプ(30a〜32a等)により操作状態を表示させる制御を行うCPU50と、各機能の作動を制御する機能制御コントローラ(30b、31b等)と、CPU50と機能制御コントローラ(30b、31b等)との間に送受信回線とを設けており、CPU50は、機能制御コントローラ(30b等)から各機能の異常情報を受信すると、該異常が発生している機能の操作状態に関わらず、スイッチランプ(30a〜32a等)により異常が発生している機能の表示をさせる制御を行う。
(もっと読む)
作業機における表示装置
【課題】コンバインに設けた表示装置において、異常状態の安全な解消方法を確認できるようにする。
【解決手段】コンバインの各種モードの情報を表示するための液晶パネルと、複数のモードのうち実行中のモードの情報を液晶パネルの画面に表示するように制御するCANコントローラユニットとを備えた表示装置において、CANコントローラユニットは、コンバイン各部の異常状態を検出した場合には、液晶パネルの画面に、警報表示モードにおける異常状態の情報として、前記異常状態に対する文字の処置情報152を表示するように制御する。
(もっと読む)
コンバインの駆動制御装置
【課題】 エンジンの始動状態から刈取作業を行うときの操作の簡略化を図ることができるコンバインの駆動制御装置を提供する。
【解決手段】 制御手段Hが、作業指令手段Iにて作業開始指令が指令されると、アクセル手段42を定格回転状態にかつ脱穀クラッチ12を入り状態にする運転起動状態にすべく、切換操作用駆動手段Mの作動を制御するように構成され、且つ、運転起動状態において、運転状態検出手段Jの検出情報に基づいて刈取作業開始条件が満たされていることを判別すると、刈取クラッチ10を入り状態にし、かつ、運転状態検出手段Jの検出情報に基づいて刈取作業開始条件が満たされていないことを判別すると、刈取クラッチ10を切り状態にすべく、切換操作用駆動手段Mの作動を制御するように構成されている。
(もっと読む)
作業機
【課題】故障案内を多言語で表示できる作業機の提供。
【解決手段】作業機であるコンバインは、表示コントローラ110、コラムコントローラ130、エンジンコントローラ150、走行コントローラ170、脱穀コントローラ190の各コントローラと、これらを相互に接続するCAN通信バス100とを備えている。表示コントローラ110が備えるEEPROM112には、制御プログラムの他、情報をデフォルトの言語により表示するための表示データを格納する。一方、他のコントローラが備えるEEPROMの空き領域には、他言語による故障案内の表示データを格納する。
(もっと読む)
コンバイン
【課題】最高速付近での馬力損失を低減すると共に、定速駆動の切換によって作業者が感じるショックを緩和させ、取扱い性を向上させる。
【解決手段】最高速手前以下の速度で、油圧変速機構40の油圧ポンプ38の変速出力により、走行部2及び作業部7を駆動すると共に、最高速付近で油圧変速機構40の入力側と出力側を直結させる車速定速機構76と、作業部7を定速駆動させる作業定速機構121を設ける作業車において、作業最高速の手前で作業部7を車速同調から定速駆動に移行させることを特徴とする。
(もっと読む)
作業機
【課題】メモリを追加することなく複数の言語で情報を表示し得る作業機の提供。
【解決手段】作業機であるコンバインは、表示コントローラ110、コラムコントローラ130、エンジンコントローラ150、走行コントローラ170、脱穀コントローラ190の各コントローラと、これらを相互に接続するCAN通信バス100とを備えている。表示コントローラ110が備えるEEPROM112には、制御プログラムの他、情報を日本語により表示するための日本語表示データ、情報を画像により表示するための共通画像データを格納する。一方、他のコントローラ(130〜190)には、制御プログラムの他に他言語用の表示データを格納する。
(もっと読む)
コンバイン
【課題】 刈り取られた穀稈の性状を確実且つ簡便に知ることができ、脱穀処理効率の向上を図り得る構造簡単なコンバインを提供する。
【解決手段】
駆動源Eからの定速回転動力を走行系変速装置700によって変速させて走行装置1及び刈取・搬送装置8へ伝達すると共に、駆動源Eからの定速回転動力を扱胴330に伝達するように構成されたコンバイン201は、刈り取られた穀稈の所定時間当たりの量を検出する穀稈流量検出装置500と、収穫された穀粒の所定時間当たりの量を検出する穀粒流量検出装置600と、制御装置100とを備え、制御装置100は、穀稈流量検出装置500及び穀粒流量検出装置600からの検出値に基づき、収穫穀稈の穀草比を算出する。
(もっと読む)
コンバイン
【課題】駐車ブレーキは、駐車ブレーキペタルと、駐車ブレーキレバーとの両者のいずれか一方の操作により、駐車ブレーキを掛けることができるが、枕地での穀稈を掻込み時に、駐車ブレーキを踏み込み、主変速レバーが前進位置へ操作されているときであると、この駐車ブレーキを離すと急発進して危険であった。これを防止しようとするものである。
【解決手段】走行用の動力伝達が遮断状態で、駐車ブレーキ装置3eがロック状態のときに、走行を操作する主変速レバー22を前進走行への操作すると、穀稈を刈取る刈取機5と、脱穀機6のフィードチェン9aとを回転駆動すると共に、駐車ブレーキ装置3eのロック解除は、主変速レバー22の中立位置への操作で可能となる構成である。
(もっと読む)
コンバインの走行姿勢制御装置
【課題】刈取機を所定高さ位置へ上昇操作して、旋回操作したときには、機体が左右に傾斜すると、左右両側のクローラは昇降制御されることにより、機体が転倒して危険であった。
【解決手段】穀稈を刈取る刈取機8と、穀稈を脱穀する脱穀機9とを設け、所定のスイッチ12の「ON」操作で、刈取機8と、脱穀機9のフィードチェン10との作動を自動停止し、機体1aの左右傾斜と、前後傾斜を検出するローリングセンサ6と、ピッチングセンサ7とを設け、刈取機8が所定高さ位置まで上昇させて停止させると、機体1aをローリング装置4でのローリング制御を停止制御する構成である。
(もっと読む)
41 - 60 / 61
[ Back to top ]