
Fターム[2B304RA03]の内容
農作業機用昇降装置 (9,026) | 主要構成、被制御機器 (505) | 駆動、伝動機構 (45)
Fターム[2B304RA03]の下位に属するFターム
PTO関連機構 (5)
クラッチ、ブレーキ、関連機構 (23)
Fターム[2B304RA03]に分類される特許
1 - 17 / 17
作業車両
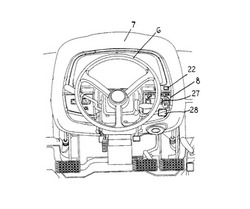
【課題】本発明は、路上走行と耕耘作業のモード切替手段を設けることによって路上走行速のままで耕耘作業に入るような事態を回避し、問題解決を図らんとするものである。
【解決手段】メータパネル(8)の適所にスイッチON・OFFにより耕耘作業モードと路上走行モードとに切り替えできるモード切替スイッチ(22)を設け、前記耕耘作業モードの詳細設定をする各種設定器(29)は、前記メータパネル(8)部周辺若しくは運転操作部(9)近くに設置してあることを特徴とする作業車両とする。また、前記各種設定器(29)は、耕深設定器(24)、傾斜設定器(26)、ブレーキ調整設定器(28)等からなり、タッチパネル画面で調整が行えるように構成してあることを特徴とする作業車両とする。
(もっと読む)
作業車両

【課題】昇降可能に装架した苗植付部や播種機等の作業装置の上昇操作を忘れた場合においても、機体後進による作溝機の詰まりや破損等の事態を招くことなく、圃場作業を円滑に進めることができる作業車両を提供する。
【解決手段】苗移植機は、作業装置4を昇降自在に支持するリンク機構およびその昇降位置検知部材と、作業装置4に設けた作溝器に粒状体を供給する粒状体供給装置5と、前後進の車速選択とリンク機構の支持高さ調節とを行う走行操作レバー73およびその走行操作検知部材73Sと、後輪回転検知部材と、報知部材71と、作業装置4に配置された報知停止スイッチ72とを走行車体に備えて構成され、リンク機構が所定高さ以下、走行操作レバー73が後進車速位置、後輪11が回転の3条件全てに該当した時に、報知停止スイッチ72の操作まで報知部材71を作動する制御を構成したものである。
(もっと読む)
苗移植機
【課題】本発明では、作業時の燃料消費を抑えた、低燃費の苗移植機を提供することを課題とする。
【解決手段】
走行車体2にエンジン20と油圧無段変速装置23を設け、走行車体2の後部に圃場に苗を植え付ける苗植付装置52を設け、油圧無段変速装置23の出力を切り替えて機体の前後進及び走行速度を操作する変速操作レバー8を設けた苗移植機において、油圧無段変速装置23に駆動容量を変更可能な可変アクチュエータ29を設け、走行車体2の走行状態を検知する第1走行検知部材14と第2走行検知部材9を設け、第1走行検知部材14の検知する走行状態に合わせて可変アクチュエータ29の駆動容量とエンジン20の回転数を制御する制御装置6を設けて構成する。
(もっと読む)
移動農機
【課題】使用頻度の高いエンジンの高回転域で、安定した作業速度を確保して作業の高能率化を図ることができるようにした移動農機を提供しようとするものである。
【解決手段】エンジン2の出力回転数を変更するアクセルペダル87と、前記アクセルペダル87の操作位置を検出するアクセルセンサ92を備え、前記アクセルセンサ92の出力に基づき、アクセルセンサ92の出力に対応するエンジン2回転数が、エンジン2の出力回転数として得られるように、前記出力回転数を制御するように構成する移動農機において、前記出力回転数の上限を設定する上限設定手段30,99,100を備え、前記アクセルセンサ92の出力に対応するエンジン2回転数が、前記上限設定手段30,99,100により設定した上限回転数よりも高い場合には、前記上限回転数が前記出力回転数として得られように、前記出力回転数を制御するように構成したものである。
(もっと読む)
苗移植機
【課題】畦越えなどしようとして、苗植付装置を上昇させるときにエンストを起こさないようにすることができる苗移植機を提供すること。
【解決手段】車体の後側に昇降リンク装置2を介して昇降可能に装着された苗植付装置3を接地する作業位置まで下降させる操作と対地浮上する所定の非作業位置まで上昇させる操作が行える昇降操作装置110bと苗植付装置を任意の高さに上昇させることができる任意上昇操作装置110cを設け、任意上昇操作装置110cを操作すると、その上昇操作量に応じてエンストさせないようにエンジン12のアイドリング回転数を上昇させ、昇降操作装置110bを操作するとエンジンのアイドリング回転数を上昇させる作動状態であると、それを解除してアイドリング回転から元の通常回転に戻るようにしたので、畦越えしながらの植付時、エンジン12のアイドリング回転数が上昇するので、走行負荷に対処でき、エンストを防止できる。
(もっと読む)
耕起作業機の耕深制御構造
【課題】エンジン回転数を耕深制御での指標とせずに、耕起装置の耕起深さを設定手段により設定した制御目標耕深に維持できるようにする。
【解決手段】走行車体1に対して耕起装置3を昇降駆動する駆動手段41、耕起装置3の制御目標耕深を設定する設定手段56、耕起装置3の対車体高さを検出する検出手段54、検出手段54の出力が設定手段56の出力に対応するよう駆動手段41の作動を制御する制御手段25A、エンジン6の燃料噴射量を演算する演算手段62、及び、検出手段54の出力が設定手段56の出力に対応したときの演算手段62の出力を制御基準値として記憶する記憶手段25Cを備え、制御手段25Aが、制御基準値と演算手段62の出力に基づいて制御目標耕深を補正し、検出手段54の出力が補正後の制御目標耕深に対応するよう駆動手段41の作動を制御する。
(もっと読む)
トラクタ
【課題】トラクタに作業機を連結する作業、或いは作業機を清掃する作業等において、作業者が地上に降りた状態であっても迅速にエンジンを停止させたり、或いはPTOクラッチを切り操作することができるようにする。
【解決手段】制御装置は、指令スイッチの何れか一つのスイッチが単独で入りとなった際には、ヒッチ機構を昇降又は傾斜させ、また、二つの指令スイッチが共に入りとなった際には、エンジンを停止させ、或いはPTOクラッチを切る。
(もっと読む)
作業用車両
【課題】燃料噴射制御手段22を備えたエンジン10にて無段変速機構14を介して走行駆動される走行機体9と,これに昇降可能に装着され前記エンジンにて駆動される作業機2と,前記作業機の昇降用油圧機構5に作動油を供給するために前記エンジンにて駆動される油圧ポンプ17を備えた作業用車両において,走行速度の変化を回避した状態のもとで,,前記油圧ポンプの小型化を図る。
【解決手段】前記作業機2を上昇作動しているときの速度が遅いか,又は,上昇作動しないとき,前記エンジンの回転数をアップするとともに,前記無段変速機構を,走行速度が変化しないように変速作動する。
(もっと読む)
農作業機
【課題】本発明では、農作業機の走行機体に対地作業機をローリング制御可能に装着した構成で、エンジンの回転速度の変化にかかわらず、ローリング制御が精度良く作動するようにすることを課題とする。
【解決手段】農作業機の走行機体1に対地作業機13を水平シリンダ19の駆動でローリング可能に装着し、走行機体1或は対地作業機13に設けた傾斜センサ23の検出信号とエンジン2の回転を検出するエンジン回転センサ27の検出回転数をコントローラ30に入力し、該コントローラ30から出力する水平シリンダ19の駆動出力デュティー比をエンジン回転数の低下で増加させて水平シリンダ19の動作速度がエンジン2の実用回転域で略一定になるようにした構成したことを特徴とする農作業機の構成とする。
(もっと読む)
農業用トラクタ
【課題】農業用トラクタの旋回制御の各種設定操作の繁雑さを解消する。
【解決手段】
ロータリ作業機Rを昇降する作業機昇降装置25と、該作業機昇降装置25を制御する作業機昇降制御手段C1と、車体の走行形態を「二駆」状態若しくは「四駆」状態に切り替える前輪駆動切替装置3と、該前輪駆動切替装置3の切り替え状態を制御する走行制御手段C2を設け、設定ポジションを走行ポジションP1と耕耘ポジションP4とに切り替える設定器9を設け、耕耘ポジションP4では、前記車体の走行形態を「四駆」状態とし、且つ前記作業機昇降制御を入りに設定する農業用トラクタにおいて、前輪増速制御、オートリフト制御またはオートブレーキ制御を夫れ夫れ単独で選択できる設定具を設け、前記設定器9を前記耕耘ポジションP4に操作すると、該設定具により選択設定された前輪増速制御、オートリフト制御、又はオートブレーキ制御を強制的に入とする。
(もっと読む)
苗移植機
【課題】 スイッチ(操作手段)の操作に基づいて苗植付部を苗補給がし易い所定の上下位置まで上昇又は下降させる構成の乗用型田植機においては、苗植付部の苗載台へ苗補給をするときにスイッチ(操作手段)の操作を格別に行わなければならず、作業性を低下させるおそれがある。また、植付作業走行中に、誤って前記スイッチ(操作手段)を操作すると、苗植付部が所定の上下位置まで上昇又は下降してしまって、苗植付が行えずに圃場に未植付区域が生じるおそれがある。
【解決手段】 走行車輌の走行を停止させる操作をするための走行停止手段と、該走行停止手段により走行停止操作が行われたことを検出するペダル保持アームセンサ(96)とを設け、該ペダル保持アームセンサ(96)による走行停止操作の検出に基づいて昇降機構を作動させて苗植付部を所定の上下位置まで上昇又は下降させる制御装置を設けた。
(もっと読む)
農作業車
【課題】 走行停止時に作業装置を任意の高さ位置に昇降させることができなくなる、などの不都合の発生を回避できるようにする。
【解決手段】 主駆動源となる電動モータAと、電動モータAからの動力を車輪9,10及び作業装置4に伝達する伝動系とを備え、伝動系に、伝動の断続を可能にする断続手段Bを設け、電動モータAを駆動源とする油圧ポンプ124を、伝動系における断続手段Bよりも伝動方向上手側に配備した伝動部材Cに連動連結してある。
(もっと読む)
トロイダル無段変速式トラクター
【課題】走行車速を制御して作業走行を行うための制御部を有するトロイダル無段変速式トラクターにおいて、対地作業機の作業開始による負荷変動の影響を抑えて安定した作業走行を可能とするトラクターを提供することにある。
【解決手段】トロイダル無段変速式トラクターは、トラクターTの車速調節用トロイダル機構5aのバリエータ比を制御して作業走行を行うための制御部Cを備え、上記制御部Cは、上記対地作業機Rの作業開始に関連して上記バリエータ比の変更制御をするように構成する。
(もっと読む)
姿勢制御装置
【課題】車輌本体に対して昇降可能且つ左右に傾動可能に連結された耕耘機に対して自動高さ制御、自動耕深制御及び自動傾き制御を行う姿勢制御装置であって、前記耕耘機を最上昇位置よりは下方で且つ地面よりは上方に位置させた非耕耘作業状態での車輌本体の走行時に、前記自動傾き制御によって前記耕耘機が意に反して大きく傾動されることを防止し得る構造簡単な姿勢制御装置を提供する。
【解決手段】自動高さ制御と自動耕深制御と自動傾き制御とを行うように構成された姿勢制御装置は、車輌本体50の車速vが所定の閾値車速vSより高速の場合には、自動傾き制御の制御精度を緩和させると共に、閾値車速vSを設定高さ位置hSに応じて変更するように構成されている。
(もっと読む)
作業車両の姿勢制御装置
【課題】農作業機を用いた農作業が簡単な運転操作で実行できるものでありながら、作業車両の転倒を防止する制御を容易にできる作業車両の姿勢制御装置を提供する。
【解決手段】リンク機構を介して昇降可能に装着した農作業機に、車両の傾斜角を検出する傾斜センサ120,131と、走行速度を検出する車速センサ127とによる検出結果に基づき作業車両の姿勢制御装置において、総合転倒角を、前記農作業機を前記作業車両に連結した場合の前記作業車両の転倒角とするとき、前記総合転倒角よりも所定角度だけ小さい警報値以上になったときに、オペレータに警報するための警報手段134と、前記傾斜センサの検出値が前記総合転倒角より一定角度小さく且つ前記警報値より大きくなったときに、前記作業車両のエンジンの回転数を強制的に低下させるエンジン回転制御手段114とを備えた。
(もっと読む)
作業車両の制御装置
【課題】従来正確な負荷変動が検知できなかったので、エンジンの回転数と燃料噴射量からトルクを演算して、該トルクの変化状態を作業時において検知し、そのトルク変化が所定の形状となるとスリップしたと判断し、このスリップが生じないように制御する。
【解決手段】電子制御式燃料噴射装置を具備し、サイクル毎の噴射量を演算する手段を備えたディーゼルエンジンを搭載した作業車両において、該エンジンのクランク軸25の回転を検知する手段33と、作業車両に装着した作業機7と、燃料噴射装置の噴射量制御手段と、作業機の昇降を制御する手段と、作業車両速度制御手段とを備え、燃料噴射量とエンジン回転数によりエンジントルクを演算し、予め任意に設定した所定時間内に急激なトルクの上昇の後に急激なトルクの低下があり、そのトルクが任意に設定した時間持続すると車輪がスリップしたと判断する。
(もっと読む)
農作業機の作業部昇降装置
【課題】 苗植機の場合に、畦際での苗植付後に土壌面や耕盤面等の傾斜で、後進操作をしないのに、走行クラッチの切り状態等では車体が後退することがある。又、昇り坂等の走行でクラッチを切るときも同様に後退することがある。このようなときは、作業部の一部、特に設置部が土壌面に突き込まれて大きな抵抗を受けて破損することがある。
【解決手段】 後進センサが走行車輪2の後進回転を検出することによって対地作業装置3を上昇制御することを特徴とする農作業機の作業部昇降装置の構成とする。車体の後側に装着した作業装置3は、下降した姿勢で対地作業を行う。この車体の走行車輪2が後進回転すると、後進センサによって検出され、この検出によって作業装置3が車体に対して非作業位置に上昇される。そして、後進操作だけでは作業装置3は上昇されず、車体の後進が行われて始めて上昇する。
(もっと読む)
1 - 17 / 17
[ Back to top ]