
Fターム[2F065RR06]の内容
光学的手段による測長装置 (194,290) | 比較基準データの作成、設定 (2,769) | 比較相手 (2,648) | 形状以外の基準データ (676)
Fターム[2F065RR06]に分類される特許
1 - 20 / 676
測位システム、測位方法、及びプログラム
検査システム及びレシピ設定方法
画像処理装置、画像処理方法
物品配列検査方法および物品配列検査装置
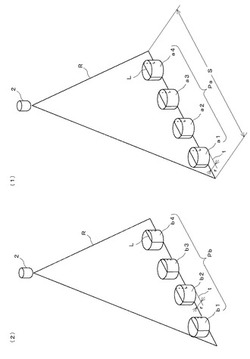
【課題】整列状態にあることが要求される物品の列について、整列状態を乱す物品の位置ずれ、欠落、倒れなどの種々の整列不良を検出することを可能とする。
【解決手段】物品の列が整列状態にあるかどうかを検査する方法であって、準備工程では、整列状態にある物品a1〜a4の列Paに対しその物品の列を列方向の全幅にわたって切断するような帯状の光Rを照射して各物品a1〜a4の表面に各物品の輪郭に沿う光切断線Lを生成するとともに、その光切断線Lを撮像して基準となる画像を取得する。検査工程では、検査対象の物品b1〜b4の列Pbに対し同じ帯状の光Rを照射するとともに、前記準備工程で撮像した光切断線の生成位置に対応する位置に生成された光切断線Lを撮像して検査対象画像を取得した後、その検査対象画像を前記基準となる画像と照合して、検査対象の物品b1〜b4の列Pbが整列状態にあるかどうかを判別する。
(もっと読む)
画像処理装置、運転支援装置、画像処理方法及び画像処理プログラム

【課題】移動体が移動する際の安全を確保するための画像処理装置を提供する。
【解決手段】移動体の予測軌道と、三次元モデルにおける移動体の位置及び大きさと、三次元モデルにおける立体物の大きさ及び位置とに基づいて、三次元モデルにおいて予測軌道上で移動体が立体物に接触するか否か判定する接触判定部260を備える。また、ステレオカメラの画像に基づいて距離を測定し、立体物の位置及び大きさを算出する。さらに、算出した横幅の接触量に基づいて予測軌道を変更した上で接触するか否か判定する。
(もっと読む)
ステレオ3次元計測装置
【課題】真に最適なパラメータ群を得ることができ、精度の高い3次元計測を可能にするステレオ3次元計測装置を提供する。
【解決手段】ステレオ3次元計測装置1は、第1,第2のカメラ21,22で計測対象物の画像を複数取得する画像取得部2と、画像取得部2から複数の画像を受けて補正するステレオ平行化部32と、ステレオ平行化部32で補正された複数の画像同士の対応点を探索して、対応点に基づいて複数の画像の評価値を算出する対応点探索部33と、画像取得部2および対応点探索部33に、予め準備しておいた複数のパラメータ群を順次入力して、上記評価値に基づいて複数のパラメータ群の中から最適なパラメータ群を選択するパラメータ選択部4とを備える。
(もっと読む)
弱測定を利用した信号の増幅装置
【課題】微弱信号を増幅可能な増幅装置を提供する。
【解決手段】増幅装置は、被測定系の観測量^Aを測定する際に、測定器と、初期状態が事前選択された被測定系を相互作用させ、次に被測定系の終状態を事後選択し、測定器の波動関数ξ(p)を用いて物理量の測定を行う。被測定系の量子状態の事前選択状態、事後選択状態それぞれのベクトルを|i>、|f>とするとき、式(1)の弱値AWが既知であり、AW=<f|^A|i>/<f|i>…(1)、測定器と被測定系の相互作用ハミルトニアンHが、測定器の運動量演算子^pおよび結合係数g(ただしg>0)を用いて式(2)で与えられ、H=g・δ(t−t0)・^A・^p…(2)、^A2=1のときに、測定器は、波動関数ξ(p)が運動量表示で実質的に式(3)となる。 (もっと読む)
(もっと読む)
位置検出装置および露光装置
【課題】波長差に起因する計測誤差を低減して高精度な位置検出を行う位置検出装置を提供する。
【解決手段】基準マークSMを利用して被検出体WMの位置を検出する位置検出装置であって、第1の波長帯域を有する計測光を用いて被検出体WMを照明する第1の照明光学系5と、第2の波長帯域を有する基準光を用いて基準マークSMを照明する第2の照明光学系13と、被検出体WMからの光束および基準マークSMからの光束を検出する検出光学系10と、検出光学系10で検出された光束に基づいて被検出体WMの位置を検出する位置検出部48とを有し、基準光の第2の波長帯域は、計測光の第1の波長帯域の上限と下限との間に設定されている。
(もっと読む)
端末装置、画像処理方法、及びプログラム
【課題】画像データに対する計測記録データを容易に作成することができる端末装置、画像処理方法、及びプログラムを提供する。
【解決手段】記憶部140は、画像データ内の第1座標範囲と、第1座標範囲に関する第1計測値データと、が関連付けられた第1画像データを保持する。制御部150は、第2画像データ内の第2座標範囲をユーザの指定に応じて取得する。解析部160は、第1座標範囲の画像パターンと第2座標範囲の画像パターンを比較し、比較結果及び第1計測値データに基づいて、第2座標範囲に関する第2計測値データを算出する。
(もっと読む)
検出装置、画像形成装置及びプログラム
【課題】保持部材の第1の方向のたわみを検出する。
【解決手段】第1のイメージセンサは、中間転写ベルトの裏面に形成されたラダーパターンチャートの濃度を測定する。記憶部は、第1のイメージセンサと中間転写ベルトの裏面との間の距離と、この第1のイメージセンサの測定に係るラダーパターンチャートのコントラストとの対応関係を示す第1の関数を記憶する。制御部は、第1のイメージセンサにより測定されたラダーパターンチャートの濃度を用いて、ラダーパターンチャートにおいて隣り合う白領域と黒領域とのコントラストを算出する。制御部は、記憶部に記憶された第1の関数を用いて、算出されたコントラストに対応する距離を特定し、特定した距離を上述した白領域及び黒領域と中間転写ベルトの裏面との間の距離として用いて、中間転写ベルトの幅方向のたわみを検出する。
(もっと読む)
回転角度計測装置及び方法
【課題】計測対象の回転体の回転角度を、計測センサが非接触で、計算コストを抑え且つ高精度で計測する。
【解決手段】回転体1の回転角度と一意的に対応するマーカ模様の境界線を有する螺旋状マーカ2を回転体1に設置し、ラインセンサ4で螺旋状マーカ2を撮影し、解析装置5によって、予め求めておいたマーカ模様の境界線位置から回転体1の回転角度を計算する式を基に、ラインセンサ4で撮影した画像から回転体1の回転角度を計測する。
(もっと読む)
光学式センサ
【課題】ノイズ光の入射により検出対象物が検出対象位置にあると判断され得る受光状態になった場合でも、誤検出が生じるのを防止する。
【解決手段】検出用の光を投光する投光部101と、投光された光に対する反射光を受光する受光部102と、検出部として機能するCPU10とを具備するセンサ1のCPU1に、受光部102の受光状態に基づき、検出対象物とセンサ1との間の距離があらかじめ定めた基準距離に適合するか否かを判別する第1の判別手段と、受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの変化の度合いがあらかじめ定めた許容範囲に入るか否かを判別する第2の判別手段との機能を付与する。各判別手段により物体との距離が基準距離に適合し、パラメータの変化の度合いが許容範囲に入ると判別されたとき、センサ1からは物体を検出したことを示す検出信号が出力される。
(もっと読む)
ボンディング装置
【課題】サーチ動作又はボンディング前のボンディング点の高さ測定を行うことなしに、高速でボンディングが可能なボンディング装置を提供すること。
【解決手段】上下方向に揺動可能なボンディングアームに搭載されて、被ボンディング部品の表面に位置するボンディング点の合焦点の検出を行う共焦点光学系と、前記ボンディングアームと一体に可動してボンディングを行うボンディングツールと、前記ボンディングツールの位置を検出する位置検出手段と、を有し、ボンディングツールのボンディング点への下降中に、共焦点光学系による合焦点検出により位置検出手段で検出したボンディングツールの位置から、前もって設定したボンディング点までの所定の距離(合焦点基準下降量)をボンディングツールが下降して、ボンディング点上で停止するように制御する。
(もっと読む)
柄計測装置及び柄計測方法
【課題】ランダム柄を正確に計測しやすい柄計測装置を提供する。
【解決手段】凹凸型を用いてプレス成型された基材30の凹凸柄を計測する柄計測装置に関する。前記凹凸型の三次元の加工データを記憶する加工データ記憶手段11。前記加工データから選択された任意の特徴部sのデータを記憶する特徴部データ記憶手段12。前記基材に形成された前記凹凸柄を全面計測して得られる三次元データを記憶する凹凸柄データ記憶手段13。前記特徴部データと前記凹凸柄データとを比較することによって、前記特徴部により前記基材に形成される特徴柄が基材30の一端からどの位置に現れるかを検出すると共に、検出された前記特徴柄の位置を基準にして前記加工データと前記凹凸柄データとを比較することによって、前記加工データと前記凹凸柄データとのズレを算出する算出手段14とを備える。
(もっと読む)
可動式ホーム柵監視用カメラ装置
【課題】都市部の駅ホームや、地下鉄の駅ホームでは、駅ホームのスペースが狭く、列車の乗降口または可動式ホーム柵の開閉部を広範囲にするための監視用カメラ装置のカメラ部の設置スペースを十分に確保できない。
【解決手段】本発明の可動式ホーム柵監視用カメラ装置は、可動式ホーム柵と、反射鏡と、前記可動式ホーム柵内に設置し前記反射鏡を介して前記可動式ホーム柵を撮像するカメラ部と、前記カメラ部が撮像した画像から乗客を検出する画像処理部と、モニタとを備え、前記画像処理部は、前記カメラ部が撮像した画像から前記可動式ホーム柵の開閉部およびその周辺を切り出して合成した合成画像を作成し、前記モニタは、前記合成画像を表示する。
(もっと読む)
薄膜製造装置のアライメント調整方法、薄膜製造装置、該薄膜製造装置により製造した電気機械変換膜、電気機械変換素子、液滴吐出ヘッド及び液滴吐出装置
【課題】低コスト化を図れる導膜製造装置、製造した電気機械変換素子、液滴吐出装置を提供する。
【解決手段】第1のアライメント調整工程では着弾位置251をカメラ205で捕捉し着弾位置251がカメラ205の撮影撮影基準位置252に一致するように基板又は液滴吐出ヘッド201を相対的に移動する。第2のアライメント調整工程ではレーザレッドによってレーザ光を照射して照射跡を形成し照射跡をカメラ205で捕捉し照射跡がカメラ205の撮影撮影基準位置252に一致するように基板又はレーザヘッドを相対的に移動する。第3のアライメント調整工程では基板上に予め形成されているアライメントマークを撮像手段205で撮影したアライメントマークの形状に基づいて基板の向きを検知して基板の向きの調整を行いアライメントマークを撮像手段205の撮影基準位置に一致するように基板を移動することで基板の組付け位置の調整を行う。
(もっと読む)
現在位置算出装置および現在位置算出方法
【課題】本発明は、誤差の累積を抑制し、目標物になりそうなものがない単調な道路でも適切に真の現在位置を算出できる現在位置算出装置および現在位置算出方法の提供を目的とする。
【解決手段】本発明にかかる現在位置算出装置は、自車17の現在位置における2次元画像である観測画像が入力される観測画像入力部1と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部9と、観測画像と、記憶されている現在位置である仮現在位置に対応する参照画像とを、画像マッチングにより照合する照合部としてのピクセルパターン照合部5と、ピクセルパターン照合部5における照合結果に基づいて、自車17の真の現在位置を算出する現在位置算出部6とを備える。
(もっと読む)
描画装置
【課題】シリコンなどのウエハー上にレーザー光を用いて露光することで描画を行う描画装置において、ナノミクロンオーダーの高精度な位置決めを行うこと。
【解決手段】レーザー光を一定方向に往復させて所定の間隔でドットパターンの描画を行う光学素子用の描画装置であって、レーザー光を照射する照明光学系と、
基盤を載置するXYステージと前記照明光学系と前記XYステージとの相対位置を測定する前記XYステージ上に設置されたナノスケールと、前記基盤上の描画信号の基準位置とその描画信号波形データ出力と、前記ナノスケールによって測定された往路のドットパターンの描画終了位置から、復路のドットパターンの描画開始位置を抽出する軸制御ユニットと、前記軸制御ユニットによって抽出された描画開始位置から描画を開始するように前記照明光学系の位置を補正する位置補正手段と、を備える。
(もっと読む)
半導体レーザ素子の端面角度測定方法
【課題】半導体レーザ素子の共振端面の角度を容易に且つ精度良く測定することができる方法を提供する。
【解決手段】光導波路の光導波方向と交差する方向に並んだ複数の半導体レーザ素子を含む半導体レーザバー2を、共振端面2aが所定の基準線21bに沿うようにステージ21の基準面21a上に固定し、半導体レーザバー2の複数の半導体レーザ素子の共振端面からレーザ光Laを出射させ、レーザ光LaのFFPを測定し、FFPのピーク位置により定まるレーザ光Laの出射方向と、所定の基準線21b及び基準面21aとの相対角度から、半導体レーザ素子の共振端面の角度を算出する。
(もっと読む)
位置検出装置、プログラム
【課題】周辺の建物の有無やレイアウトの変更等にかかわらず、簡便に詳細な位置情報を取得する。
【解決手段】位置検出装置が、所定の視野角に表示画像を表示する表示装置によって表示される表示画像と、予め設置された表示装置によって表示画像が表示される視野角方向の位置を示す位置情報とを対応付けて記憶し、表示装置によって表示された表示画像が撮像された撮像画像の入力を受け付け、入力された撮像画像に含まれる表示画像に対応付けられた位置情報を読み出す。
(もっと読む)
1 - 20 / 676
[ Back to top ]