
Fターム[2F065UU09]の内容
光学的手段による測長装置 (194,290) | 特に重要な点 (2,939) | 光学系 (648) | 指標 (71)
Fターム[2F065UU09]に分類される特許
1 - 20 / 71
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
アライメント方法およびパターン形成方法
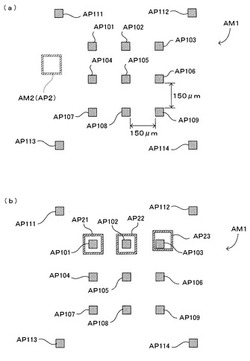
【課題】2つの基板のそれぞれに形成されたアライメントマークの両方に同時にピントを合わせることができない場合であっても、それらの位置合わせを高精度に行うことを可能にする。
【解決手段】パターンを転写される基板に形成されるアライメントマークAM1は、正方形の中実図形であるアライメントパターンAP101〜AP109、AP111〜AP114を配列してなるものとする。一方、基板に転写すべきパターンを担持するブランケットには、アライメントマークAM2として、環状の中空矩形のアライメントパターンAP2をパターンと同じ材料で形成する。アライメントマークAM1は、低い空間周波数成分をアライメントパターンAP2よりも多く含むパターンにより構成されており、ピントが合わない状態で撮像された場合でも重心位置を精度よく検出することが可能である。
(もっと読む)
情報端末装置

【課題】簡素且つ高精度に撮像対象の大きさを推定して、その大きさに応じて表示情報の制御を行うことのできる情報端末装置を提供する。
【解決手段】撮像部2と、撮像対象の大きさを推定する推定部3と、情報を表示する表示部6と、表示部6で表示する情報を記憶する記憶部5と、推定された大きさに関連する情報を記憶部5から読み出して制御する制御部4とを備え、推定部3が、撮像対象の一面上に設けられた大きさ及び形状が既知のタグを検出するタグ検出部と、タグの周囲に形成される撮像対象の領域を抽出する領域抽出部と、検出タグの配置とタグの所定配置との比較に基づいて、検出タグの撮像部2に対する姿勢を推定する姿勢推定部と、推定姿勢に基づいて抽出された撮像対象の一面の大きさと、その一面を除外した奥行き部分の大きさとを推定するサイズ推定部とを含むよう情報端末装置1を提供する。
(もっと読む)
コークス炉移動機の位置調整方法及び装置
【課題】コークガイド車などの移動体の移動路に沿って設けられた目標体とコークス炉の位置関係に誤差が生じても移動機を簡易に目標とする位置にする。
【解決手段】コークガイド車1の移動路に沿って設けられた目標体9を検出し、目標体検出装置4で目標体9を検出したときのコークガイド車1の規定位置に対し、目標位置検出装置5で目標位置を検出しながら規定位置から目標位置までコークガイド車1を移動し、検出された目標位置と規定位置との位置誤差を記憶し、以降、目標体9を検出した位置から記憶された位置誤差分だけ移動してコークガイド車1を目標位置にすることにより、目標体9とコークス炉7の位置関係に誤差が生じても、一度、目標体9を検出したときの規定位置と目標位置との位置誤差を記憶してしまえば、以降はコークガイド車1を簡易に目標とする位置にすることができる。
(もっと読む)
回転角度計測装置及び方法
【課題】計測対象の回転体の回転角度を、計測センサが非接触で、計算コストを抑え且つ高精度で計測する。
【解決手段】回転体1の回転角度と一意的に対応するマーカ模様の境界線を有する螺旋状マーカ2を回転体1に設置し、ラインセンサ4で螺旋状マーカ2を撮影し、解析装置5によって、予め求めておいたマーカ模様の境界線位置から回転体1の回転角度を計算する式を基に、ラインセンサ4で撮影した画像から回転体1の回転角度を計測する。
(もっと読む)
施工補助装置、施工補助方法
【課題】建築物の施工、解体、デザインの製作など、幅広い意味での施工を必要とする施工領域における面積を簡便に算出すると共に、必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、必要となる機器の種類や大きさなどを推測できる、施工補助装置を提供する。
【解決手段】施工補助装置は、施工対象物100の画像に基づいて、施工対象物100の所定領域の面積を算出する面積算出手段と、施工対象物100の周辺情報を記憶する第1記憶部と、施工対象物100の施工に必要となる要素である施工要素を記憶する第2記憶部と、所定領域の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物100の施工特性を算出する算出手段と、を備える。
(もっと読む)
フレーム部材用検査治具、フレーム部材用検査装置及びフレーム部材用検査方法
【課題】廉価な測定装置を使用するとともに、測定方向が異なる種々の被検査部位を、同一方向から容易且つ正確に測定することを可能にする。
【解決手段】フレーム部材用検査装置10は、フレーム部材12に設けられる被検査部位の位置を測定し、前記測定された位置の精度を検査する。この検査装置10は、フレーム部材12を所定の姿勢に保持する保持機構50と、前記フレーム部材12の被検査部位に直接装着されるとともに、前記被検査部位に対応し且つ前記フレーム部材12の横方向に向かう計測孔部86が設けられる検査治具52と、前記計測孔部86を測定して算出される該計測孔部86の位置情報に基づいて、前記被検査部位の位置精度を検出する測定機構56L、56Rとを備えている。
(もっと読む)
マーカ、マーカ検出方法および装置
【課題】対象物が太陽光で照らされた屋外のように、多様性や変化に富んだ環境下において、画像中の対象物を10画素以下の少ない画素から、誤認することなく検出することができるマーカ、マーカ検出方法および装置を提供する。
【解決手段】対象物1の表面に取り付けたマーカ10であって、乱反射材からなる内層12と、内層の外側に取り付けられた偏光フィルムからなる外層14とを有し、外光2を乱反射し、地表に対し水平、垂直、又は斜めの偏光3に変換して放射する。
(もっと読む)
変位測定装置及び光無線通信システム
【課題】光無線通信システムのトラッキング機構の小型化、測定精度向上等を実現する。
【解決手段】送信ユニット11に2つの距離センサ14,15を設け、受信ユニット21に位置指標部23と基準高さ部24を設ける。位置指標部23は、複数のエリアに区画され且つ各エリア毎に高さが異なる三次元形状に形成され、基準高さ部24を基準とした各エリアの高さとエリア位置との関係を変位測定テーブルデータとして記憶する。各距離センサ14,15によって位置指標部23の1つのエリアまでの距離と基準高さ部24までの距離をそれぞれ測定し、これら2つの距離測定値の差分と変位測定テーブルデータとに基づいて位置指標部23のうちの第1の距離センサ14で測定したエリア位置を特定することで、受信ユニット21の変位量及び変位方向を判定し、その判定結果に基づいて送信部12と受信部22との光軸ずれを補正するように光軸ずれ補正機能を作動させる。
(もっと読む)
レーザ計測用ターゲット治具及びレーザ計測システム
【課題】計測システム全体の小型化及び軽量化を図るとともに、配管の取付位置を正確に特定することができる、レーザ計測用ターゲット治具及びレーザ計測システムを提供する。
【解決手段】第一フランジ11に一端部2a及び中間部2bが固定される計測器用固定治具2と、第二フランジ12に固定されるレーザ計測用ターゲット治具3と、計測器用固定治具2の他端部2cに固定されるレーザ計測器4と、第一フランジ11及び第二フランジ12の位置を算出する演算手段5と、を備え、レーザ計測用ターゲット治具3は、第二フランジ12に配置される台座31と、レーザ光を反射可能な表面32aを有し台座31に表面の一部が突出するように固定された球体32と、台座31を第二フランジ12に固定する固定手段33と、を有する。
(もっと読む)
入力装置、入力制御方法及びプログラム
【課題】 低消費電力でコストを掛けずに直感的な遠隔操作を行えるようにすることにある。
【解決手段】 入力装置(10)は、離隔位置にある所定立体形状のマーカ体(18、33、42)を画像認識する画像認識手段(8)と、前記画像認識手段の認識結果に基づいて前記マーカ体の姿勢を判定する姿勢判定手段(13)と、前記姿勢判定手段の判定結果に対応したイベントを発生するイベント発生手段(15)とを備える。マーカ体(18、33、42)の画像を認識し、その画像に基づいてマーカ体の姿勢を判定して遠隔操作用のイベントを発生する。リモコンに適用する場合は、リモコン本体にマーカ体を取り付ければよい。
(もっと読む)
自己発光型ターゲット及び変位計測システム
【課題】 屋外において昼夜に亘って連続的に変位計測が可能で計測誤差が少ない変位計測用の自己発光型ターゲット、及びそれを備えた変位計測システムを提供すること。
【解決手段】 撮像手段(カメラ3)で撮像した画像を解析手段(PC4)で解析することにより計測対象物(レール)の変位計測を行う変位計測システム1に用いられ、計測対象物(レール)に取り付けられて自ら発光する変位計測用の自己発光型ターゲット(計測用ターゲット2)を、ケース20と、このケース20の背面側内部に取り付けられて発光する発光手段21と、ケース20の前面側内部に取り付けられ、蓄光性蛍光体と光透過性物質とを含有して板状に成型された蓄光面材22と、を備えた内照式の自己発光型ターゲットとする。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】カメラの取り付け位置や取り付け姿勢の情報を迅速かつ精度良く得ることを課題とする。
【解決手段】設定部232は、4個のマーカーが映し出された画像平面上の4個に対応するカメラ座標系における仮想的な4つの対応点の中から基準マーカーとする点Mを選択する。そして、設定部232は、基準点Mまでの距離L0に所定の値を設定する。作成部233は、基準点M以外の点、つまり基準マーカー以外のマーカーに対応する点1〜点3までの各距離L1,L2,L3を表す数式を作成する。導出部234は、設定部232により設定された基準マーカーで採用する全ての符号パターンを導出する。棄却部235は、導出部234により導出された符号パターンの中から、距離L1、L2、L3の値の少なくとも1つが相応しい値となり得えない符号パターンを棄却する。
(もっと読む)
カメラポーズ情報算出装置およびカメラポーズ情報算出プログラム
【課題】GPS装置や地磁気センサ等の検出装置を用いずに、カメラの位置や姿勢を示すカメラポーズ情報を算出すること。
【解決手段】メディア媒体に対応する画像領域である位置情報埋込領域をカメラ画像データから抽出し、電子透かしにおいて電子的に埋め込まれた媒体位置情報を前記位置情報埋込領域から抽出するとともに、前記メディア媒体の位置情報が示す位置と対応する当該位置情報埋込領域の位置を示す座標を示す画像座標情報を前記位置情報埋込領域から抽出する位置情報抽出手段と、前記位置情報抽出手段が抽出した前記媒体位置情報および当該媒体位置情報に対応する前記画像座標情報に基づき、前記実空間中における前記カメラの位置と姿勢を示すカメラポーズ情報を算出するカメラポーズ情報算出手段と、を備えることを特徴とする。
(もっと読む)
楕円球体の挙動解析方法
【課題】転動する楕円球体の挙動解析を可能にする。
【解決手段】本発明の楕円球体の挙動解析方法は、一対の軌道輪12,13の間で転動する楕円球体11を撮影し、その画像から当該楕円球体11の挙動を解析するものである。この方法は、楕円球体11の長軸S上に配置される第1及び第2のマーカーM1,M2を楕円球体11の表面に設け、楕円球体11の画像中に第1及び第2のマーカーM1,M2が含まれない場合に同画像中に少なくとも2つ含まれる、複数の他のマーカーM3,M4を楕円球体11の表面に設け、第1及び第2のマーカーM1,M2と、複数の他のマーカーM3,M4との相対位置についての位置情報を取得し、楕円球体11の画像中に含まれる少なくとも他の2つのマーカーM3,M4から、前記位置情報を用いて前記第1及び第2のマーカーM1,M2の位置を求めることを特徴とする。
(もっと読む)
三次元計測治具及びこれを用いた三次元計測方法
【課題】計測点が平面にある場合や縁にある場合の計測精度の向上を実現したうえで、計測点が凹面にある場合であったとしても、この計測点の三次元座標を正確に計測することが可能である三次元計測治具及びこれを用いた三次元計測方法を提供する。
【解決手段】レーザ測定機LによってワークW上における計測点Pの三次元座標を得るのに用いられる球状のリフレクタRを保持する三次元計測治具1であって、リフレクタRをスライド可能に保持する計測溝4と、ワークW上における計測点Pに接する指示点31を備え、計測溝4は、計測点Pがある部位に対して接近離間する方向に形成され、少なくとも計測溝4の計測点Pから離れた遠端部41で保持するリフレクタRの中心Rpと、計測溝4の計測点P寄りの近端部42で保持するリフレクタRの中心Rpとを結ぶ線分dの延長線上に、指示点31が配置されている。
(もっと読む)
車両寸法計測装置
【課題】反射材を備えるターゲットが複数設置された車両をステレオカメラにより撮影した画像のみに基づいて、車両の寸法を精度良く計測できる車両寸法計測装置を提供する。
【解決手段】 車両2の車長に合わせて設置され、既知の高さに設定される車長用ターゲット3と、車両2の車幅に合わせて設置され、車長用ターゲット3と同一の高さに設定される車幅用ターゲット4と、車両2の最も高い位置に設置される車高用ターゲット5と、車両2の車軸方向に沿うように設置され、車長用ターゲット3及び車幅用ターゲット4と異なる既知の高さに設定される車軸用ターゲット6と、夫々のターゲット3〜6が設定された車両2を撮影するステレオカメラ7と、該ステレオカメラ7から得た画像に基づいて、車両2の寸法を計測する演算装置とを備える車両寸法計測装置1。
(もっと読む)
基板検査装置
【課題】オフセット量を正確かつ容易に取得する。
【解決手段】第1の位置情報に基づいて特定される位置Ob上にビーム照射部が位置するように移動させた後に、照射部をX方向(矢印A1,A2の向き)に移動させながらレーザービームを照射させたときのレーザービームの反射光量の変化、およびY方向(矢印B1,B2の向き)に移動させながら照射させたときの反射光量の変化に基づいてマーク21の位置Mx1,Mx2,My1,My2を取得すると共に、位置Mx1,Mx2,My1,My2と、第2の位置情報とに基づいて基板保持機構によって保持されているオフセット量取得用基板におけるマーク21の位置Mbを特定し、位置Mb,ObのX方向に沿った位置ずれ量Xb、およびY方向に沿った位置ずれ量Ybを、照射部のX方向に沿った移動量、およびY方向に沿った移動量をそれぞれ補正するためのオフセット量として特定する。
(もっと読む)
現場作業支援システムにおけるマーカ配置方法
【課題】現場作業支援システムにおけるトラッキング誤差の軽減を実現するマーカ配置方法を提供する。
【解決手段】予め作業現場に設置されたラインマーカ5a,5bと、作業者が携行するカメラ1a〜1cと、作業現場の画像と指示情報を表示して作業者に提供するHMD2と、前記カメラで作業現場を撮影して得た撮影画像中の前記ラインマーカの画像位置に基づいてカメラ(作業者)の位置と向きを計測し、作業者に対して提供する情報画像を作業現場の画像に重ねて前記HMDに表示させる情報処理を行う情報処理装置3を備えた現場作業支援システムにおいて、ラインマーカの位置は、(1)画像処理によって得られるコードマークに含まれる誤差の大きさの推定し、(2)(1)の結果と誤差計算手法及び遺伝的アルゴリズムを用い、様々なラインマーカ配置におけるトラッキング誤差を推定し、ラインマーカの配置を繰り返し計算して誤差を小さくできる位置に決定する。
(もっと読む)
レーザー距離計付き撮影装置
【課題】レーザー距離計を簡単な構造の取り付け器具によりアクセサリーシューを有する撮影機材(デジタルカメラ)に一体的に取り付ける。
【解決手段】被写体Hを撮影レンズ12により撮影した被写体像を結像して被写体像のデジタル画像データを出力する撮像素子13を内蔵した撮影機材(デジタルカメラ)10と、デジタルカメラ10から被写体Hまでの距離を測定するレーザー距離計20と、デジタルカメラ10のアクセサリーシュー16に着脱されるシュー着脱部材32が基板31の一面(下面)31aに突出して設けられ且つレーザー距離計20を載置する載置部30b1が一面(下面)31aとは反対側の他面(上面)31bに形成された取り付け器具30と、を備えたレーザー距離計付き撮影装置1を提供する。
(もっと読む)
1 - 20 / 71
[ Back to top ]