
Fターム[3C007CX00]の内容
マニピュレータ、ロボット (46,145) | 関節 (545)
Fターム[3C007CX00]の下位に属するFターム
関節部に駆動源を有するもの (234)
関節部に減速機を組み込むもの (198)
関節部にロック機構を設けるもの (40)
関節にクラッチを設けるもの (13)
関節にストッパを有するもの (16)
Fターム[3C007CX00]に分類される特許
21 - 40 / 44
ロボット関節およびトルク伝達力可変装置
【課題】小型であっても変位量を大きく確保でき、ロボットが人間に接触したときに、接触した人間に対して実際の人間に接触したときと同様に柔らかい動きの感覚を与えることができるロボット関節を提供する。
【解決手段】アクチュエータ30は、電気エネルギーを受けた場合に変形する電歪エラストマー37と、電歪エラストマー37に取り付けられ、電歪エラストマー37の形状に応じて出力部材20に対して接触状態と離間状態とを切り替えるシュー38を備える。トルク制御部40は、電歪エラストマー37に電気エネルギーを与えることにより、基部材10から出力部材20へ伝達するトルクを制御する。さらに、シュー38が出力部材20に接触している状態において、出力部材20が外部から所定トルク以上のトルクを受けた場合に、シュー38が出力部材20に対して擦りながら、出力部材20が基部材10に対して回転する。
(もっと読む)
ロボットアーム駆動装置

【課題】ロボットのアーム駆動装置において、モータの回転をアーム側に伝達するベルト伝動機構のベルトが切れても、アームが不用意に回転することのないようにする。
【解決手段】駆動プーリ14および従動プーリ15とは別に、モータの回転軸17および減速装置の入力軸18にそれぞれ歯付きプーリからなる補助プーリ19,20を取り付け、これら両補助プーリ19,20間に歯付きベルトからなる補助ベルト22を緩んだ状態にして掛け渡す。伝動ベルト16が切れると、補助ベルト22の歯22aが補助プーリ19の歯19aおよび補助プーリ20の歯20aと噛み合って回転軸17と入力軸18との間を動力伝達状態にする。
(もっと読む)
接続構造及びフロッグレッグアームロボット
【課題】揺動可能に接続される部材同士の組立て後の位置調節を可能とする。
【解決手段】相対的に揺動可能に接続される第1部材24と第2部材23との接続構造100であって、 上記第1部材24と上記第2部材23との間に配置される連結部材110と、上記第1部材24に固定されると共に上記連結部材110を上記第1部材24と上記第2部材23との揺動中心とされる第1軸L1回りに回転可能に支持する第1ベアリング120と、上記第2部材23に固定されると共に上記連結部材110を上記第1軸L1回りに対して平行に変位された第2軸L2回りに回転可能に支持する第2ベアリング130と、上記連結部材110を上記第2部材23に対して相対的に回転可能な状態と固定状態とに切替え可能な切替手段140とを備える。
(もっと読む)
ベアリングの固定構造
【課題】ベアリングの転動体案内部材を固定部材と固定子との間にボルトで共締めすることにより固定部材に固定する構造において、V溝に位置する転動体に対する与圧が変動してしまうことを防止できるベアリングの固定構造を提供する。
【解決手段】クロスローラベアリング23は、外輪29及び内輪30が軸に対して直交する分割面を有していないと共に、クロスローラベアリング23を押圧する固定子を、クロスローラベアリング23の外輪29或いは内輪30に対する押圧部位の押圧方向への投影面がV溝29a,30aから外れるような形状にしたので、ボルトを強く締め付けることによりクロスローラベアリング23を固定部材と固定子との間に挟持状態で固定するにしても、押圧力がクロスローラベアリング23の外輪29及び内輪30のV溝29a,30aに作用することはない。
(もっと読む)
接続構造及びフロッグレッグアームロボット
【課題】揺動可能に接続された部材同士の接続構造にて疲労が確認された場合の補修作業にかかる時間やコストを削減する。
【解決手段】相対的に揺動可能に接続される第1部材24と第2部材23との接続構造100であって、外輪111が上記第1部材24に固定されるベアリングと、該ベアリングの内輪に固定されると共に上記第2部材23と固着されずに配置されるベアリング座120と、該ベアリング座120と上記第2部材23とを締結すると共に上記ベアリング座120と上記第2部材23との間で応力を伝達する締結手段130とを備える。
(もっと読む)
パラレルメカニズム
【課題】使用時に樹脂ソケットが球体と同行変位するのを確実に防止して、操作ヘッドを常に適正に駆動操作できるパラレルメカニズムを提供する。
【解決手段】ベースに配置される複数個の駆動モーターと、駆動モーターで駆動操作される駆動アームおよびロッドと、ロッドで支持される1個の操作ヘッドとを備えている。ロッドの両端は、駆動アームおよび操作ヘッドに対してボール継手17で連結する。ボール継手17は、球体を備えたボール軸20と、ボール軸20に連結されるソケットロッド21と、樹脂ソケット22とからなる。球体の表面にダイヤモンド・ライク・カーボン処理を施し、樹脂ソケットをフッ素を含むポリアセタールで形成する。球体と樹脂ソケットとの間にグリース溜36を設け、フッ素系合成油とフッ素系樹脂で構成されたグリースで潤滑する。
(もっと読む)
パラレルメカニズム
【課題】使用時に樹脂ソケットが球体と同行変位するのを確実に防止して、操作ヘッドを常に適正に駆動操作できるパラレルメカニズムを提供する。
【解決手段】ベースに配置される複数個の駆動モーターと、駆動モーターで駆動操作される駆動アームおよびロッドと、ロッドで支持される1個の操作ヘッドとを備えている。ロッドの両端は、駆動アームおよび操作ヘッドに対してボール継手で連結する。ボール継手は、球体を備えたボール軸と、ボール軸に連結されるソケットロッドと、樹脂ソケットとからなる。樹脂ソケットとソケットロッドの装着座の間に、互いに係合して樹脂ソケットの移動を規制するストッパー構造を設ける。ストッパー構造は突起と、突起と係合する凹部(または穴、溝)で構成する。
(もっと読む)
パラレルメカニズム
【課題】 メンテナンス性を悪化させることなく、アーム等を揺動可能に連結するボールジョイントの外れを抑制することが可能なパラレルメカニズムを提供する。
【解決手段】 パラレルメカニズム1の第2アーム8を構成するロッド9の遊端部と、ブラケット14とを揺動可能に連結するボールジョイント16は、ボールスタッド30と、ソケット部材としてのロッド33とを備えている。ボールスタッド30は、球状外周面を有する球状頭部31と、軸部32とを有している。一方、ロッド33は、球状頭部31の球状外周面に略対応した内周面を有する半球状凹部34及び、該半球状凹部34から滑らかに連続する延長部35が形成されたソケット36を有している。延長部35は、略円筒状に形成されており、かつ、球状頭部31の赤道38から軸部32側に該軸部32の軸線に沿って延びるように形成されている。
(もっと読む)
パラレルメカニズム
【課題】 アーム等を揺動可能に連結するボールジョイントの外れを検知することが可能なパラレルメカニズムを提供する。
【解決手段】 パラレルメカニズム1を構成するアーム本体6は、第1アーム7と、一対のロッド9,10を有する第2アーム8と、ロッド9,10の一端と第1アーム7とを連結するボールジョイント16,17と、ロッド9,10の他端とブラケット14とを連結するボールジョイント18,19とを備える。各ボールジョイント16〜19は、球状頭部31を含むボールスタッド30と、球状頭部31を揺動回動自在に保持するソケット35と、球状頭部31とソケット35との間に介装される導電部材36とを有する。検知装置40は、ボールスタッド30、導電部材36、及びソケット35で形成される単位検知回路が4つ直列に接続された集合検知回路44の導通の有無に基づいて、ボールジョイント16〜19の外れを検知する。
(もっと読む)
パラレルメカニズム
【課題】 アームをより軽量化して、アームの慣性モーメントを減少させることが可能なパラレルメカニズムを提供する。
【解決手段】 アーム本体6は、ベース部2に取り付けられた電動モータ4にその一端が連結される第1アーム7と、一対のロッド9,9を有し、第1アーム7の他端とブラケット14とを連結する第2アーム8と、第2アーム8を構成する一対のロッド9,9を互いに引っ張る方向に付勢する連結部材11,12とを備える。各連結部材11,12は、板ばね30と、該板ばね30の両端に該板ばね30と一体的に形成された一対の取付部31,31とを有している。板ばね30は、該板ばね30の湾曲部における接平面が、一対のロッド9,9それぞれの軸線を含む平面に対して垂直となるように、一対のロッド9,9に取り付けられる。
(もっと読む)
ロボットアーム
【課題】精密な作業が可能であって人間の生活環境でも安全に使用でき、しかも極力小型軽量化できる多関節ロボットアームを提供する。
【解決手段】剛性能動関節とされた肘関節J3〜J5および手首関節J6,J7により、ハンドHDの位置や姿勢の精度が十分に確保されるため、ハンドHDによる精密な作業が可能となる。また、柔軟能動関節とされた肩関節J1,J2により、人体に接触した際の衝撃が緩和されるため、人間の生活環境での安全な使用が可能となる。さらに、大型で重量も嵩む柔軟能動関節は、基端部側の2つの肩関節J1,J2のみとされているため、大型重量化が最小限に抑えられる。しかも、重量の嵩む肩関節J1,J2の重量に起因する大きなモーメントは先端部側の肘関節J3〜J5、手首関節J6,J7には作用しないため、これらの関節を補剛する必要がなく、その分、大型重量化が抑えられる。
(もっと読む)
コンプライアントジョイント
【課題】 人間とロボットとの衝突による被害を防ぐためにロボットに受動コンプライアンスを具現することができるコンプライアントジョイントを提供する。
【解決手段】 ハウジングと、前記ハウジングの内部に回転可能に設けられるカム部材と、前記カム部材に装着され、収縮または伸張可能なローラスプリング装置と、前記ハウジングに設けられ、前記カム部材の回転によって前記ローラスプリング装置が収縮または伸張されるように案内するガイド部材と、前記ガイド部材に設けられ、前記ローラスプリング装置が収容される場合に前記ハウジングと前記カム部材とを係合させ、前記ローラスプリング装置が離脱する場合に前記ハウジングと前記カム部材との係合を解除する収容溝と、を備えるコンプライアントジョイントとした。これにより、一定の大きさ未満の衝撃に対してはロボットのロバスト性をそのまま維持し、一定の大きさ以上の衝撃に対してはロボットのロバスト性を急に低下させる。
(もっと読む)
可変剛性を有する関節機構
【課題】ロボットアームに搭載可能で、耐久性が高く、弾性部材の劣化による影響を抑えることができる、可変剛性を有する関節機構を提供する。
【解決手段】アームが、前腕伝達機構42および前腕モデル3から成り、関節軸41aを中心として回転可能に、上腕2に設けられている。前腕伝達機構42は、長さ方向に沿った中央レール溝42dおよびサイドレール溝42eを有する。各溝42d,42eは、関節軸41aからモデルパイプ31の長さ方向に対して垂直方向に所定の距離をあけて設けられている。弾性部材43fが、線形性を有し、付勢力が常に関節軸41aに向くよう、関節軸41aを中心として回転可能に上腕2に設けられている。各弾性部材43fは、関節軸41aを中心として回転するとき、関節軸41a側の一端が各溝42d,42eに沿ってスライドし、他端と関節軸41aとの距離が一定に保持されるよう構成されている。
(もっと読む)
選択的に硬化可能且つ能動的に操縦可能な関節動作可能装置
【解決手段】選択的に硬化可能且つ能動的に操縦可能な関節動作可能装置について説明される。1つの態様において、第1の内腔を有する可撓性の内管と、該内管を収容する可撓性の外管と、多数の重なり合う硬化可能なうろこ状片と、を含む関節動作可能装置について説明される。各うろこ状片は、内管に結合され、内管と外管との間に位置付けられる。とりわけ注目すべきは、重なり合う片が、互いに対して滑動可能な非硬化状態と、互いに対して滑動可能でない硬化状態との間で作動可能なことである。 (もっと読む)
ロボット制御装置、ロボット制御方法及びロボット制御プログラム
【課題】複数の機能部品(構成ユニット)からなる実ロボットと仮想ロボットで共通のロボット部品の構成をとり、それを制御するプログラムを共通に使えるようにする。
【解決手段】仮想ロボットのエージェントモデル部110は、実ロボットにおけるエージェントモデル部とハードウエア構成及びソフトウエア構成を同じとする。バーチャルCPC(Configurable Physical Component)部120は、実ロボットにおけるCPC部の情報のみで構成され、バーチャルロボット機能部品を結合するソフトウエアからなるバーチャルCPCマネージャ120Bが存在する。ミュレーションにおいては仮想ロボットを構成する1つ以上のバーチャルロボット機能部品にそれぞれ設定された座標系において、重心,質量,回転軸,重心における慣性行列を求める手段と、連結されたバーチャルロボット機能部品間の座標変換を行う手段とを備える。
(もっと読む)
可変剛性機構及び該機構を備えたロボット用関節機構
【課題】零剛性から極高剛性を実現可能な可変剛性機構を提供する。
【解決手段】可変剛性機構10は、主回転軸12について回転可能な主関節14と、主回転軸12に連結されて閉リンク系を形成する少なくとも1つのリンク機構16とを有する。リンク機構16は、主回転軸12から半径方向に距離r離れた位置に固定されかつ主回転軸12に平行な第1回転軸18及び20について回転可能な2つの第1関節22及び24と、第1関節22及び24にそれぞれ連結され第1回転軸18及び20に略垂直な2つの第2回転軸26及び28について回転可能な2つの第2関節30及び32と、2つの第2関節30及び32に両端が連結されかつ主回転軸12に略平行に延びるリンク34とを有する。
(もっと読む)
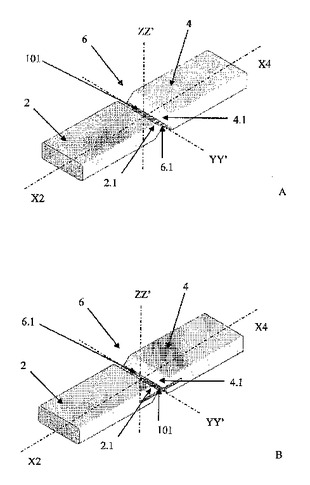
ロボット用の或いは触覚インターフェース用の継手付き肢部並びにそのような継手付き肢部を含むロボット及び触覚インターフェース
本発明の主要目的は、少なくとも第一(2)及び第二(4)の剛性セグメントと、継手(6)とを含む、ロボット又は触覚インターフェースのための継手付き及び器具付きリブであり、前記継手(6)は、繊維と、少なくとも1つの測定素子(101,102)とを含み、剛性セグメント(2,4)のそれぞれの内に固定される。本発明は、目的のために、少なくとも1つのそのような継手付き肢部を含むロボット又は感触インターフェースも有する。
 (もっと読む)
(もっと読む)
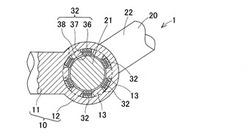
擬似自由関節を有する非固定式ロボットおよびその制御方法ならびに擬似自由関節
【課題】ロボットが物体を床から持ち上げる際に、初期状態から静的不安定領域を通過し
て終端状態へ物体を持ち上げる場合においてもロボットが転倒しないための擬似自由関節
を提供する。
【解決手段】関節を動かすための力を与えるアクチュエータ100と、当該関節の動きを
当該アクチュエータ100から当該関節以外の部位に伝達し、当該関節以外の部位を動か
すための複数の歯車26〜29と、当該関節の角度または負荷を検出するために、前記複
数の歯車26〜29のうち所定の噛み合う歯車同士26,27のそれぞれが装着されてい
るシャフトの各々23,24に取り付けられた一対のエンコーダ21、22とを備え、エ
ンコーダ21,22は、前記一対の歯車の互いの歯が触れないように制御することにより
擬似的な自由運動を生成可能とする。
(もっと読む)
リンク作動装置
【目的】 構造が簡単で、軽量コンパクトなリンク作動装置を提供する。
【構成】 静止部材1に対する可動部材4に、その軸線に対して垂直な平面内で軸中心から半径方向に三つの受け部6を円周等配位置に設け、可動部材4の各受け部6に球面部材5を半径方向に摺動可能にそれぞれ配置し、球面部材5の中心の静止部材1への投影位置が円周等配位置でそれぞれのPCR位置を保持するように、球面部材5を軸方向に摺動可能に静止部材1に設け、球面部材5と静止部材1間あるいは球面部材5と可動部材4間の少なくともいずれか一方に、可動部材4を静止部材1に対して所定の姿勢で固定する静止機構7を設ける。
(もっと読む)
アクチュエータシステム、ロボットアームおよびリハビリテーションシステム
【課題】 人間の腕や脚と同等の関節屈曲角度を得ることができるアクチュエータシステム、ロボットアームおよびリハビリテーションシステムを提供する。
【解決手段】 本発明のアクチュエータシステムは、中空円筒状の弾性体と、弾性体の長手方向に沿って該弾性体内に埋設され、弾性体に比較して低弾性の補強材とから構成され、加圧流体の供給により長手方向に収縮可能な複数のアクチュエータ10をオフセット配置し、互いを接続して直列に構成したことを特徴とする。
(もっと読む)
21 - 40 / 44
[ Back to top ]