
Fターム[3C007GS01]の内容
マニピュレータ、ロボット (46,145) | 把持装置交換 (231) | 接合手段 (126)
Fターム[3C007GS01]の下位に属するFターム
ボール式 (23)
把持爪式 (16)
差込式(ネジ、ピン、クイ等) (20)
ツイスト式、螺合式 (9)
磁力式 (9)
Fターム[3C007GS01]に分類される特許
1 - 20 / 49
ロボット、ロボット制御装置、ロボット制御方法、およびロボット制御プログラム
【課題】汎用性の高いねじ締めを行えるロボット、ロボット制御装置、ロボット制御方法、ロボット制御プログラムを提供する。
【解決手段】ドライバービット51の先端の係合部52が磁化されているドライバー50を把持するアーム部20と、アーム部20を制御する制御部100とを備え、制御部100は、ドライバー50の係合部52を磁力により係合可能な頭部を有するねじ211の頭部頂面の溝に押しつけた状態で、ドライバー50の係合部52にねじ211の頭部頂面の溝が嵌合した状態で磁力により生じる吸着力よりも小さく、ドライバーの係合部52にねじ211の頭部頂面の溝が当接した状態で磁力により生じる吸着力よりも大きい慣性力がねじ211に作用する第1の所定の加速度で、ねじ211が吸着されたドライバー50を移動させる。
(もっと読む)
自動ピッキング装置及び自動ピッキング方法

【課題】自動ピッキングを行う際に、ハンド及びピッキング対象部品の破損リスクを低くする自動ピッキング装置を提供する。
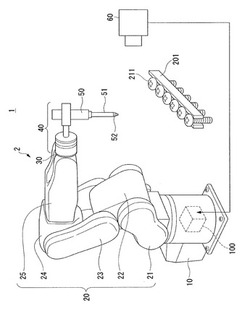
【解決手段】部品60の高さ情報を含む視覚情報を取得する計測装置20と、部品20どうしの高さの差が許容値以上になったか判断し、高さの差dが許容値以上である場合には、最上部品60aを移動させる最上部品移動命令を生成する許容差制御装置21と、部品60の位置情報及び姿勢情報を演算する部品位置姿勢情報演算装置22と、最上部品60a又は部品60に対するロボット10を制御するロボット制御信号を生成し、ロボット制御信号によりロボット10を制御するロボット制御装置30と、ロボット10の先端に取り付けられたエンドエフェクタ16を制御するエンドエフェクタ制御信号を生成し、エンドエフェクタ制御信号によりエンドエフェクタ16を制御するエンドエフェクタ制御装置40とを備える。
(もっと読む)
術具及びその術具を有する手術支援システム
【課題】より正確に術具の寿命をコントロール可能な術具及びその術具を有する手術支援システムを提供すること。
【解決手段】術具先端部200の内部に、術具先端部200が位置決めアーム部100に装着されたときに通電されるタイマ201を設ける。このタイマ201は、位置決めアーム部100によって通電されたときに術具先端部200の使用時間又は動作回数をカウントする。タイマ201のカウントの結果、術具先端部200が寿命に達した場合にはロック機構201aが動作して術具の動作がロックされる。
(もっと読む)
搬送ロボット
【課題】シンプルな構造で複数の種類のワークを搬送することができる搬送ロボットを提供する。
【解決手段】三次元に移動可能な移動部11を備えた搬送ロボット1である。移動部11は、第1ワーク8を把持するための第1把持部3と第2ツール4を接続するための第1接続部23とを設けた第1ツールを有しする。第2ツール4は、第1接続部23に着脱可能に係合する第2接続部43を有すると共に、第2ワーク9を把持するための第2把持部5を有する。第1接続部23と第2接続部43は鉛直方向に互いに嵌合することにより水平方向の位置決めを行う位置決め部24、44を有している。
(もっと読む)
溶接マニピュレータ教示装置
【課題】レーザ光が照射された溶接ワークの撮像画像に基づく仮想ワイヤ距離Lを表示することで、溶接ワイヤの曲げ修正の手間をなくし、教示作業の精度向上、容易化を図る。
【解決手段】本発明に係る溶接マニピュレータ教示装置1は、溶接マニピュレータ2の溶接ノズル3に備えられる溶接ワイヤ4を溶接ワークWの溶接線Sに沿わす溶接動作を、溶接マニピュレータ2に教示する。溶接マニピュレータ2に、溶接ワイヤ4のワイヤ軸WJ方向又はこのワイヤ軸WJを横切る方向に沿ってレーザ光Kを溶接ワークWへ照射する投光器5と、投光器5のレーザ光軸LJを横切る方向からレーザ光Kが照射された溶接ワークWを撮像するカメラ6とを配備した光学機構7が設けられ、カメラ6の撮像画像Gと、撮像画像Gに基づいて計算された溶接ノズル3から溶接ワークWまでの仮想ワイヤ距離Lとを表示する表示手段8を有する構成となっている。
(もっと読む)
電子部品実装装置および電子部品実装方法
【課題】部品保持状態における吸着ノズルの安定した保持力の確保と、ノズル交換時の着脱容易性とを両立させることができる電子部品実装装置および電子部品実装方法を提供することを目的とする。
【解決手段】吸着ノズル26を着脱自在に保持するノズル保持部25に、吸着ノズル26に設けられた被クランプ部26fをクランプする複数のクランプアーム32およびこれらのクランプアーム32をクランプ方向に付勢する環状バネ部材33よりなるクランプ機構と、吸着ノズル26と連通する吸引開口部25bを真空吸引することによって発生する真空圧によりピストン29を内側方向に駆動して、補助アーム27をクランプアーム32に対して当接させて押圧力を作用させ、クランプ機構による吸着ノズル26の保持力を補強する保持力補強機構を備える。
(もっと読む)
ロボット手術用のツールメモリベースのソフトウェアの更新
【課題】好適なロボット装置等を提供すること。
【解決手段】ロボット手術および他のロボットアプリケーションで使用するためのロボット装置、システム、および方法、および/または医療機器、システム、および方法は、再利用可能なプロセッサおよび限定使用のロボットツールの両方、または医療用プローブを含む。限定使用の構成要素であるメモリは、プロセッサによってインプリメントされるデータを有する機械可読コードおよび/またはプログラミング命令を含む。プロセッサのプログラミングは、プロセッサによって構成要素からダウンロードした新しいデータを一度送ることによって更新することができる。以降の構成要素は、ダウンロードを繰り返さずに更新されたプロセッサを活用することができる。
(もっと読む)
マニピュレータの制御方法及び管台内作業方法
【課題】マニピュレータを用いた管台内における作業に要する時間と労力を低減することができるマニピュレータの制御方法及び管台内作業方法を提供する。
【解決手段】マニピュレータ100にレーザセンサ121を設置し、第1の位置において回転させながら90°間隔で1a〜4a点の順に4点において距離を計測する第1の補正計測を行い、第1の補正計測の結果より、1a点と3a点の距離の差及び2a点と4a点の距離の差を管台16との中心位置のズレとして中心位置を補正する第1の補正を行い、第2の位置においてレーザセンサ121を回転させながら90°間隔で1b〜4b点の順に4点において距離を計測する第2の補正計測を行い、第2の補正計測の結果より、1b点と3b点の距離の差及び2b点と4b点の距離の差を管台16との傾きのズレとして傾きを補正する第2の補正を行う。
(もっと読む)
医療用マニピュレータ
【課題】体腔内からのガスリークを可及的に抑制することができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、中空の連結シャフト18と、連結シャフト18内に挿通されるワイヤ80a及びロッド82aと、連結シャフト18の一端側に設けられ、ワイヤ80a及びロッド82aを軸線方向に進退駆動するプーリ70a及びトリガレバー36と、連結シャフト18の他端側に設けられ、ワイヤ80a及びロッド82aの進退駆動によって動作される先端動作部12と、ワイヤ80a及びロッド82aがそれぞれ摺動可能に挿通される複数の孔部110a〜110fが形成され、連結シャフト18の内面に対して密着配置されることにより、該連結シャフト18内を先端動作部12側とプーリ70a側とに仕切る気密シール100とを備え、スリット124が形成された孔部の摺動部118と、スリット124が形成されていない孔部の摺動部112は、ワイヤ80a及びロッド82aの摺動方向での位置がずれている。
(もっと読む)
医療用マニピュレータ
【課題】体腔内からのガスリークを可及的に抑制することができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、中空の連結シャフト18と、連結シャフト18内に挿通されるワイヤ80a及びロッド82aと、連結シャフト18の一端側に設けられ、ワイヤ80a及びロッド82aを軸線方向に進退駆動するプーリ70a及びトリガレバー36と、連結シャフト18の他端側に設けられ、ワイヤ80a及びロッド82aの進退駆動によって動作される先端動作部12と、ワイヤ80a及びロッド82aがそれぞれ摺動可能に挿通される複数の孔部110a〜110fが形成され、連結シャフト18の内面に対して密着配置されることにより、該連結シャフト18内を先端動作部12側とプーリ70a側とに仕切る気密シール100とを備え、複数の孔部110a〜110fのうち、少なくとも一部の孔部110a、110bの近傍には、ガイドパイプ116が配置されている。
(もっと読む)
医療用ロボットシステム
【課題】本発明は、支持する器官の形状の個人差等に対応することができ、しかも部品点数の増加を抑えることができる医療用マニピュレータを備えた医療用ロボットシステムを提供する。
【解決手段】ロボットアーム24と、ロボットアーム24に着脱自在に設けられ、子宮Aを所定の位置に支持するための子宮マニピュレータ34と、ロボットアーム24及び子宮マニピュレータ34を操作するコンソール26と、を備えた医療用ロボットシステム10であって、子宮マニピュレータ34は、基部58に設けられた第1アーム部60と、第1アーム部60よりも先端側に位置して子宮Aを保持する第2アーム部64と、第1アーム部60と第2アーム部64とを連結し、かつ第1アーム部60に対する第2アーム部64の向きを可変可能な連結部68とを備え、第2アーム部64は、長手方向に伸縮可能に形成されている。
(もっと読む)
継手及び自動工具交換装置
【課題】ロボットに使用されて簡易に電源電圧を安定させることができる継手、及び、当該継手を搭載した自動工具交換装置を提供する。
【解決手段】ツール部21に接続された継手22の第1接続ユニット30は、ツール負荷41に接続された第1の端子群33を有する。本体部20に搭載された継手22の第2の接続ユニット31は、第2の端子群35を有する。継手22は、第1の端子群33及び第2の端子群35で構成された接点を繰り返し接続及び離間することができる構造をもつ。継手22の第1の接続ユニット30は、継手22の接点とツール負荷41の間に接続された電圧昇圧装置42をもっている。
(もっと読む)
医療用マニピュレータ
【課題】体腔内からのガスリークを可及的に抑制することができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、中空の連結シャフト18と、連結シャフト18内に挿通されるワイヤ80aと、連結シャフト18の一端側に設けられ、ワイヤ80aを軸線方向に進退駆動するプーリ70aと、連結シャフト18の他端側に設けられ、ワイヤ80aの進退駆動によって動作される先端動作部12と、ワイヤ80aの一部を囲繞して該ワイヤ80aに密着固定されると共に、連結シャフト18の内面に対して摺動可能であることにより、該連結シャフト18内を先端動作部12側とプーリ70a側とに仕切る気密シール100とを備える。
(もっと読む)
医療用ロボットシステム
【課題】高い自由度を得るとともに、操作者が先端動作部に加わる外力を確実且つ簡便に感知可能にする。
【解決手段】医療用ロボットシステム10は、人手によって操作されるジョイスティック21と、ジョイスティック21の動きに連動して電気的に駆動されるロボットアーム18と、ジョイスティック21と一体に設けられ、人手によって操作されて第1ワイヤ34を進退させるトリガレバー46と、ロボットアーム18の先端に設けられたマニピュレータ12とを有する。マニピュレータ12の先端動作部56は、第1ワイヤ34と機械的に接続されて駆動されるグリッパ52と、該グリッパ52の向きを変える関節62とを有する。
(もっと読む)
一括保持トレイ及び三次元集積回路製造装置
【課題】三次元集積回路の段数に応じたチップサイズの変化やチップ中心位置のずれに対応することが可能な一括保持トレイを提供する。
【解決手段】一括保持トレイ46を、第一の吸引経路55を有する本体部47と、本体部47に着脱自在に装着されるアタッチメント48と、から構成する。アタッチメント48は、複数のチップ20を吸着する複数の吸着部50と、複数の吸着部50から気体を吸引する第二の吸引経路49と、を有する。アタッチメント48を本体部47に装着するとき、複数の吸着部50で複数のチップ20を吸着できるように本体部の47第一の吸引経路55がアタッチメント48の第二の吸引経路49に繋がる。複数のチップ20を吸着するアタッチメント48を本体部47に対して交換可能にすることで、三次元集積回路の段数毎のチップサイズの変化やチップ中心間ピッチの変化に対応することができる。
(もっと読む)
ロボットハンド
【課題】チャックの開閉を検出するセンサに接続される電線の断線の可能性を低減させるロボットハンドを提供する。
【解決手段】ロボットハンドは、産業用ロボットのアームに装着されるハンド本体部31と、ハンド本体部31に接続されるとともに、被把持物を把持するチャック4の取付けが可能なハンド先端部32とを備え、ハンド先端部32は、チャック4に設けられ当該チャック4の動作を検出可能なセンサSNに電線84を介して接続される副プリント基板64を有し、ハンド本体部31は、副プリント基板64と電気的に接続される主プリント基板61を有している。
(もっと読む)
塗装装置におけるスプレーガンの取付構造及びそれを用いたスプレーガンの交換方法
【課題】塗料の色替え作業が容易であるとともに、回転塗装においてワークの側面の塗装も可能な塗装装置を提供すること。
【解決手段】塗装ブース内に配設されたロボットアーム2の先端に、係止部材7を介して、複数個のスプレーガン12を装着したスプレーガン支持アーム9を着脱自在に係止して構成され、スプレーガン支持アーム9は、アーム本体10とアーム本体10に着脱自在に装着した複数個のスプレーガン12とアーム本体10に突設した係止爪11を具備し、係止部材7は、係止爪11が係止可能であるとともにロボットアーム2の先端に回動自在に軸支され、スプレーガン支持アーム9における係止爪11を係止部材7に係止することでロボットアーム2にスプレーガン支持アーム9を装着し、係止部材7に対する係止爪11の係止を解除することでロボットアーム2からスプレーガン支持アームを取り外すこととした。
(もっと読む)
自動生産装置
【課題】小型かつ低コストで、多品種に容易に対応可能な汎用性の高い自動生産装置を提供する。
【解決手段】架台2上でワークWに対して複数の作業を行う自動生産装置1は、架台上に設置されてワークの搬送及び複数の作業を行う2基の多関節アーム部6A、6Bと、2基の多関節アーム部に交換可能に取付けられ、ワークの搬送及び複数の作業の少なくとも1つに対応する形状に形成された複数の作業ハンド7と、基台15Aと、基台上に設置されて複数の作業のうち少なくとも1つに使用される作業機構16A〜16Fとを有し、架台上かつ2基の多関節アーム部の少なくとも一方の作業範囲内に交換可能に配置された複数の作業ユニット8と、架台上に設けられ、作業ユニットの配置位置を規定する位置決め手段17と、2基の多関節アーム部及び複数の作業ユニットと接続され、ワークの搬送及び複数の作業を制御する制御部23と、を備える。
(もっと読む)
生産装置
【課題】部品の組立を行なう装置を小型化させると共に、作業効率の向上を図ることができる。
【解決手段】生産装置1は、組立部の一部を保持するハンド11を有する一対のマニピュレータ10A、10Bと、二つの部品の組立位置をなす組立ステージ12と、マニピュレータ10A、10Bを動作させる制御装置14とを有し、マニピュレータ10A、10Bはそれぞれのハンド11A、11Bの作業領域が一部重複するよう配置され、この重複した作業領域Rに組立ステージ12が配置された構成とした。
(もっと読む)
動作補助具
【課題】簡単な構造で伸縮自在な帯体を有し、必要なときは帯体を伸ばして離れた所に位置する物体を容易に取ることができ、不要なときは小形化して携帯することができる動作補助具を提供する。
【解決手段】第一第二の帯体26,34の先端部に取り付けられた取付部材28と、取付部材28に着脱可能に連結された付け替え可能な作業部材29を備える。ケース12は、第一帯体26を巻き回した第一回転ドラム24を収容した第一収容部14と、第一収容部14から第一帯体26を外側に引き出す第一開口部18を備える。さらにケース12は、第二帯体34を巻き回した第二回転ドラム32を収容した第二収容部16と、第二収容部16から第二帯体34を外側に引き出す第二開口部20を備える。第一開口部18と第二開口部20は、同方向に向かって開口している。
(もっと読む)
1 - 20 / 49
[ Back to top ]