
Fターム[3C269AB17]の内容
数値制御 (19,287) | 作業内容、対象機器、対象製品 (2,914) | 電気電子製品製造 (51)
Fターム[3C269AB17]に分類される特許
1 - 20 / 51
加工装置
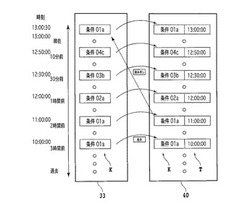
【課題】オペレータが誤って加工条件を書き換えてしまった場合であっても、過去の加工条件を復元でき、かつ、このことをオペレータの負担を増やさずに実現可能とする技術を提案する。
【解決手段】被加工物を保持する保持手段と、保持手段に保持された被加工物を加工するための加工手段と、加工手段を制御する制御手段と、制御手段と接続され加工条件を入力する入力手段と、を含む加工装置であって、加工装置は、制御手段中のデータ設定部に設定された加工条件に基づき加工を行い、データ設定部上の加工条件はデータ設定部に接続された加工条件記憶手段に自動的に保存され、入力手段で過去の任意の時刻を指定することで、データ設定部に設定された現時点の加工条件を、任意の時刻の加工条件に置き換える。
(もっと読む)
位置決め制御装置およびこれを備えた位置決め装置

【課題】 カメラで位置決め対象を撮影する位置決め制御装置で、高精度な位置決め動作を可能とする。
【解決手段】 位置決め対象を撮像した時刻が特定できる撮像時刻特定信号と検出位置とを出力する画像処理装置30、および撮像時刻特定信号が取得された時刻の位置決め対象を移動させるモータ53、56の回転位置から所定時間前の回転位置を計算し、該計算値と検出位置と目標位置とに基づき、位置決め対象が目標位置になるようにモータ53、56を制御する駆動制御装置40を備え、位置決め対象を静止中に撮像して位置決め対象が目標位置になるように制御した場合の第1の回転位置と、移動中に撮像して位置決め対象が目標位置になるように制御した場合の第2の回転位置とを予め取得し、前記所定時間を第1の回転位置と第2の回転位置とに基づいて決定する。
(もっと読む)
部品実装装置及び部品実装方法
【課題】撮像手段が基板加熱ヒータによって加熱される状況が、部品装着前の位置合わせ時と部品装着時とでほぼ一致するようにして部品の装着精度を向上させることができるようにした部品実装装置及び部品実装方法を提供することを目的とする。
【解決手段】治具部品載置部AR2に載置された治具部品JGを上方から撮像カメラ16により撮像して第1の撮像画像を取得するとともに、装着ヘッド15によりピックアップした治具部品JGを下方から撮像カメラ16により撮像して第2の撮像画像を取得して装置誤差を検出するとき、撮像カメラ16が基板加熱ヒータH2によって加熱される状況が、その後、部品3と部品装着部位2aとの位置合わせ時に撮像カメラ16が基板加熱ヒータH2によって加熱される状況に近くなるように治具部品載置部AR2の選択を行う。
(もっと読む)
移動装置の軌道情報生成装置
【課題】複数の軌道情報を独立して生成するにあたり、複数の軌道を結合した全体での移動時間が最短となるように各々の軌道情報を生成する新たな軌道情報生成装置を提供する。
【解決手段】所望の始点から終点まで移動装置を移動させるための軌道及び軌道上の速度に関する軌道情報を互いに異なる制約条件の下で生成する二つの軌道情報生成部を有し、これら軌道情報生成部で生成される二つの軌道情報のうち一方の軌道の終点と他方の軌道の始点とを一致させて結合点とし、結合点を介して両軌道を連結可能に各々の軌道情報を生成する装置である。結合点で取り得る複数の速度V0〜VMAX(移動に要する合計時間が最小となる速度Vsを含む)のうち、結合点における速度を制約条件の一つとして各々の軌道情報生成部で生成される各軌道情報に基づく移動に要する合計時間が最小となる速度Vsを繰り返し演算により算出する速度算出部を設けた。
(もっと読む)
制御システム及びこの制御システムに用いる位置推定方法
【課題】サンプリング周期を細かくすることなく、モータの速度変動等に精度よく対応することが可能な制御システム及びこの制御システムに用いる位置推定方法を提供する。
【解決手段】第2モータ43と、第2モータ43の回転角度に基づくウェハのノッチの位置データを所定の周期で検出する第2エンコーダ44と、第2モータ43をサーボ制御するサーボ制御器32と、サーボ制御器32に対して動作指令を発する位置制御部2と、を有する制御システム1において、位置制御部2は、サーボ制御器32の動作指令を生成するとともに、所定周期で第2エンコーダ44から取得した位置データを取得時刻と共に記憶し、時刻tにおける被制御体の位置f(t)を位置データに基づいてn次の多項式で表し、n次の多項式補間により任意の時刻におけるウェハ(ノッチ)の位置を推定する。
(もっと読む)
加工装置による被加工物の加工方法
【課題】温度変化の影響を受けずに、チップの刃先を設定された位置に固定保持する段取り作業を実施可能な、加工装置による被加工物の加工方法を提供する。
【解決手段】内周面50bの加工の際、チップ31の取付け姿勢を調整するために行われる段取り作業100は、一定気温の室内にてチップ31をホルダー部32に取付けるセッティング工程(ステップS101)と、その後ホルダー部32の温度をクーラント液52と一致させ、ホルダー部32を主軸4に取付ける取付工程(ステップS102)と、その後ホルダー部32の温度をクーラント液54と一致させ、内周面50bを加工する加工工程(ステップS103)と、その後被加工物50の温度を測定し、制限時間(t)内に筒状部50aの内径寸法を測定し、該内径寸法より前記測定温度に見合った被加工物50の熱膨張量分を加減算して前記内径寸法を補正する測定工程(ステップS104)とにより構成される。
(もっと読む)
複数軸駆動装置、複数軸駆動機械、及び複数軸駆動装置の駆動制御方法
【課題】複数のモータ制御回路のいずれかに異常が生じた場合であっても、複数の駆動軸の軸間誤差による締結部の過大な内部応力の発生を防止する。
【解決手段】モータ2の駆動を制御するモータ制御回路6を設け、共通の目標駆動位置指令とモータ3の駆動位置の位置偏差を保持する位置偏差カウンタ50と、その位置偏差を少なくするようモータ3の駆動を制御するための位置制御部202とを備えたモータ制御回路7を設け、モータ制御回路6は、異常通知信号を出力する異常検出部107と、異常検出されたときにモータ2の駆動を停止する停止制御手段とを有し、モータ制御回路7は、異常通知信号が入力された際に目標駆動位置指令に代えて、モータ2の駆動位置が位置制御部202へ入力されるように信号経路を切り替える切替スイッチSW2を有し、位置制御部202は、異常通知信号が入力された際に位置偏差カウンタ50の位置偏差をリセットする。
(もっと読む)
ツール先端のオフセット測定方法及び該方法を利用した加工位置移植方法、並びにこれら方法を実行する自動加工装置
【課題】x、y、z軸において座標制御されると共にz軸に沿う中心軸2axis周りに回転制御されるアームにコテ先が装着されたはんだ付け装置において、アームの中心軸2axisに対するコテ先先端1dのオフセットを測定するためのオフセット測定方法を提供する。
【解決手段】中心軸2axisに対しコテ先先端1dが第1の位置にあるときのコテ先先端1dのx座標Xm1及びy座標Ym1を取得し、該第1の位置からアームを中心軸周りに180°回転させてコテ先先端1dを第2の位置にしたときのコテ先先端1dのx座標Xm2及びy座標Ym2を取得し、x座標Xm1及びXm2と、y座標Ym1及びYm2と、をそれぞれ演算し、該演算結果に基づいて、中心軸2axisに対するコテ先先端1dのx軸及びy軸におけるオフセット値Xm,Ymを算出する。
(もっと読む)
加工装置
【課題】 メイン操作パネルから離れた場所でメンテナンス作業を行う場合の便宜性を図った加工装置を提供することである。
【解決手段】 制御手段に接続された操作キーを有する操作パネルによって操作され、側面及び/又は背面にオペレータがメンテナンス作業を行う作業領域を備えた加工装置であって、該操作パネルは加工装置の正面に設けられたメイン操作パネルと、該作業領域近傍に設けられたメンテナンス操作パネルとからなることを特徴とする。
(もっと読む)
位置決め装置及び位置決めステージの位置決め方法
【課題】従来の位置決めでは、位置決めする際の整定範囲をゼロとして目標値に位置決めさせた場合、被駆動体がモータにより目標値に位置決めされた後もモータが常に小刻みに振動したり、外乱により被駆動体が整定範囲外に移動してしまう問題が発生する可能性があった。
【解決手段】位置センサが検出した位置決めステージが位置する現在値が第1の整定範囲内の場合は、位置決めステージの整定範囲を第2の整定範囲内に変更し、位置センサが検出した位置決めステージが位置する現在値が第1の整定範囲外の場合は、再度位置決めステージを第1の整定範囲内に位置するように移動させる。
(もっと読む)
加工装置における加工移動量補正値の決定方法
【課題】レーザ干渉計を用いることなく簡便に加工手段の加工移動量の補正値を求める。
【解決手段】切削手段40A,40Bのスピンドルヘッド部(加工部)42に取り付けた読み取り手段110によりチャックテーブル32に設置したスケール100,101の位置情報を読み取ってX・Y・X方向の実移動量を取得し、この実移動量と、各方向の移動量検出手段71〜73で検出される各可動ベース部22,52,62の検出移動量との差を加工移動量の補正値とする。
(もっと読む)
座標補正方法
【課題】タクトタイムの増加を防ぎつつ精度よく誤差を補正することを可能にする座標補正方法を提供する。
【解決手段】作業に先立って、各位置決めステージA、Bでの搬送手段4とマニピュレータ5、6を含む機械座標系に由来する誤差を検出して第1の補正テーブルを作成し、この第1の補正テーブルに基づいて作業時に機械座標系に由来する誤差を補正する第1の補正と、作業時に、いずれかの位置決めステージA、Bで、複数の作業対象物2、3のそれぞれの寸法公差に由来する誤差を検出して第2の補正テーブルを作成し、この第2の補正テーブルに基づいて各作業対象物2、3の寸法公差に由来する誤差を補正する第2の補正とによって、作業対象物2、3上の作業位置とエンドエフェクタ7、8の相対的な位置ズレを補正するようにした。
(もっと読む)
自動位置ずれ補正方法、及び自動位置教示方法。
【課題】
フィンガ部が水平面内で回転方向にずれて取り付けられていても、最適な位置教示データが自動で取得できる位置教示方法を提供する。フィンガ部の位置ずれ量を検出して、このずれ量を補正して、最適な位置に被搬送物を搬送できる位置教示方法を提供する。
【解決手段】
搬送ロボットが移動可能なX軸方向に対し平行に備えられた第1、第2の目的物を検出することで搬送ロボットの中心位置を特定し、その後、第3の目的物を検出する。これらの動作で得られた位置データから最適な搬送位置を自動で教示する。
(もっと読む)
ロボットシステム、その制御装置及び方法
【課題】サイクルタイムを増加させることなく、ハンドで把持した作業対象物の位置姿勢計測及び位置姿勢修正を行えるようにする。
【解決手段】アーム先端部11の位置姿勢を制御可能なアーム1と、アーム先端部11に取り付けられ、作業対象物3を把持する把持機構21を具備し、把持した作業対象物3のアーム先端部11からの相対位置姿勢を制御可能なハンド2と、把持した作業対象物3のアーム先端部11からの相対位置姿勢計測を行う位置姿勢計測装置22とを備えたロボットシステムにおいて、把持機構21で作業対象物3を把持した後、アーム先端部11が移動している最中に、作業対象物2のアーム先端部11からの相対位置姿勢の計測を行い、その位置姿勢計測の結果に基づいて、作業対象物3がアーム先端部11からの所定の相対位置姿勢をとるように、ハンド2のアーム先端部11からの相対位置姿勢の修正を行う。
(もっと読む)
切削装置及び切削方法
【課題】ワークの切削状況を高精度にリアルタイムで把握可能な切削方法を提供する。
【解決手段】ワーク10を切削する切削方法であって、ワーク10のテストカットを行う際にスピンドル20に取り付けられた加速度センサ25からの第1出力信号に基づいて基準データを生成する工程と、ワーク10の実カットを行う際に加速度センサ25からの第2出力信号に基づいて実カットデータを生成する工程と、実カットデータが基準データの範囲から外れているか否かを判定する工程と、実カットデータが基準データの範囲から外れている場合に警報を出力する工程とを有し、基準データ及び実カットデータは、加速度センサからの第1出力信号及び第2出力信号のそれぞれに対して、ハイパスフィルタを用いた波形処理を行い、この波形処理で得られた信号を二重積分することにより生成される。
(もっと読む)
ロボットの動作診断方法、ロボットの制御装置、ミニエンバイロメントシステムの制御装置、ロボット、及びミニエンバイロメントシステム
【課題】ロボット動作を診断して不具合を回避することができ、かつ、異常部位の詳細表示やパネル上でのロボット動作の再現により、メンテナンス時間を短縮できるロボットの動作診断方法を提供する。
【解決手段】複数の駆動軸をそれぞれ駆動する複数のモーター、マニピュレータ、及びセンサを有し、駆動軸によりマニピュレータを移動させるロボットの動作診断方法において、少なくとも1つの駆動軸に対し、ロボットの診断対象とする動作パターンを設定し、ロボットの初期状態での動作パターンにおいて、複数回計測したモーターを制御する制御装置の複数の入出力信号と、センサまたはマニピュレータを制御する機器の複数の入出力信号とを判定データとし、新たに計測した判定データを診断データとし、統計的パターン認識方法により診断データが判定データに含まれるかを判別することにより、新たに計測した時のロボットの動作が正常であるか判定する。
(もっと読む)
シミュレーション装置,シミュレーション方法およびシミュレーションプログラム
【課題】三次元モデルを用いたシミュレーション装置において,画像認識を行わずに,パターン認識による二次元位置の検出をシミュレートする技術を提供する。
【解決手段】シミュレーション装置において,三次元機構モデル情報記憶部33には,マークセンサモデルと基準マークモデルとを含む三次元機構モデルのデータが記憶されている。基準マーク検出部34において,マークセンサ検出領域設定部303は,マークセンサモデルに設定された,実カメラの光学的仕様のデータに基づいて,三次元機構モデルの空間にマークセンサ検出領域を設定する。基準マーク抽出部304は,マークセンサ検出領域内に存在する基準マークモデルを抽出する。検出結果設定部308は,抽出された基準マークモデルの位置から求められる,基準マーク検出の目的となる検出位置の座標を,基準マーク検出結果に設定する。
(もっと読む)
電子部品実装装置および電子部品実装装置におけるカメラ位置補正方法
【課題】部品の実装作業中における基板認識カメラや部品認識カメラによる画像の取り込みに際して校正マークが邪魔にならず、常に安定した位置ずれ補正を行なうことのできる電子部品実装装置を提供する。
【解決手段】座標系相互間の位置ずれ補正を行なうために必要とされる画像を基板認識カメラ2や部品認識カメラ4に取り込む間だけ透明な液晶表示パネル5に校正マーク12を表示し、画像の取り込み完了後には校正マーク12の表示を終了させて液晶表示パネル5を透明な状態に戻す。校正マーク12を支承する部材を着脱する必要がないので補正処理の実施が容易であり、校正マーク12を支承する部材の着脱によって校正マーク12の取り付け位置にずれが生じる不都合も解消される。
(もっと読む)
X−Y直交2軸駆動機構
【課題】ロストモーションが最も顕現化する側にリニアスケールを配置してロストモーションを補正することができるようにしたX−Y直交2軸駆動機構の提供。
【解決手段】一側駆動ユニット13と、ワーク部材30であるコンタクトピン31を備えて一側駆動ユニット13に搭載される他側駆動ユニット23とからなり、一側駆動ユニット13が備える一対の一側リニアガイド18,19のうち、ロストモーションが最も顕現化する側にある一側リニアガイド19の内側近傍位置には、予め定めてある原点位置との関係でコンタクトピン31の実座標位置を理論座標位置に一致させるためのパルス指令を発するリニアスケール33を設置し、該パルス指令により一側駆動ユニット13が備える一側サーボモータ15の回転を制御することで、コンタクトピン31の位置をロストモーションを加味して調整可能とした。
(もっと読む)
ロボット教示システム
【課題】ロボットの教示作業に必要な時間を短縮することが可能なロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ツール13と、制御部20とを備えている。制御部20は、加工対象Wの図面データ25を読み込む図面データ読込部21と、図面データ25を表示する表示部29と、表示部29上で参照マーク35を移動させる入力部22とを有している。特定領域設定部43は目標図形50に対して特定領域51を設定するとともに、通過位置設定部24は、図面データ25上の特定領域51に参照マーク35を一致させた場合に、当該特定領域51に対応する一の通過位置を定める。プログラム作成部31は、移動プログラム32を作成し、出力部33は、移動プログラム32をロボットコントローラ12に送信する。
(もっと読む)
1 - 20 / 51
[ Back to top ]