
Fターム[3C269QD10]の内容
数値制御 (19,287) | 表示手段、警報手段の構成 (611) | カラー表示をするもの (67)
Fターム[3C269QD10]に分類される特許
21 - 40 / 67
NC工作機械
【課題】
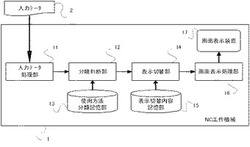
機械操作者の操作入力作業を簡略化すべく、機械操作者の使用方法に合わせた画面表示を設定することができるNC工作機械を提供する。
【解決手段】
機械操作者からの入力データを入力する入力データ処理部と、前記機械操作者の使用方法を予め分類し記憶する使用方法分類記憶部と、前記機械操作者の入力データに応じて前記使用方法分類記憶部に記憶された何れの使用方法であるかを判断する分類判断部と、前記使用方法の分類内容に応じて、前記機械操作者に対して操作入力を促す表示画面の表示項目のうち、入力不要項目はマスクするように予め設定された表示切替内容記憶部と、前記分類判断部の判断内容に応じて、前記表示切替内容記憶部から表示すべき表示項目を特定し、前記機械操作者の入力データに応じた表示画面となるように画面切替を行う表示切替部と、を備えた。
(もっと読む)
機械の操作装置

【課題】
ティーチペンダントの非常停止スイッチが有効に機能していない状態にも関わらず、有効に機能しているものとして報知することがある。
【解決手段】
TP(ティーチペンダント)100は非常停止SW110と、非常停止SW110の状態に応じて発光する発光体Lと、非常停止SW110の接点状態を監視し、接点状態に応じて光源制御信号を出力する第1CPU120,第2CPU130を備える。光源制御回路125は発光体Lを光源制御信号に基づいて制御する。ウオッチドッグ回路160は、第1CPU120,第2CPU130の作動状態を監視し、異常の場合に光源制御回路125に対し発光体Lの制御を禁止する。非常停止SW110が有効に機能していないにも関わらず機械を緊急停止させようとする行動を回避させることができる。
(もっと読む)
工作機械の誤差表示装置
【課題】直進軸と回転軸を有する工作機械を対象とした場合に、NCデータによる理想的な工作機械の動作に対する実際の工作機械の動作の誤差を把握することができる工作機械の誤差表示装置を提供する。
【解決手段】NCデータに基づいて工作機械1の直進軸および回転軸を運転した場合の直進軸および回転軸に関する機械座標系の軸位置測定データを取得する。直進軸および回転軸の機械座標系の軸位置測定データと機械情報とに基づいて座標変換をして、ワーク座標系における工具の測定加工点移動軌跡を算出する。NCデータに基づいてワーク座標系における工具の基準加工点移動軌跡を表示画面に表示すると共に、測定加工点移動軌跡を基準加工点移動軌跡に重ねて表示画面に表示して、基準加工点移動軌跡に対する測定加工点移動軌跡の誤差を表示画面に表示する。
(もっと読む)
加工シミュレーション装置および数値制御装置
【課題】加工不具合の判別や、加工不具合の発生要因の容易な推定を可能とする加工シミュレーション装置および数値制御装置を得ること。
【解決手段】距離フィールドモデルで表現された加工対象物の形状をシミュレーションする切削シミュレーション部3と、シミュレーション結果から比較対象形状を選択する比較対象選択部4と、シミュレーション結果をグラフィック表示するためのレンダリング処理を実行する形状描画処理部5と、シミュレーション実行制御部2と、を有し、レンダリング処理において、画素が配列された投影面と、投影面上の各画素から投影面に垂直な方向である投影方向に沿う光線と、比較対象形状および光線の交点位置と、を想定するとして、形状描画処理部5は、交点位置において、参照基準形状に対する符号付距離値と、距離フィールドから導出可能な二次的幾何特徴量の差分と、に基づいて画素の輝度値を決定する。
(もっと読む)
数値制御プログラムのコマンド表示装置及びコマンド表示プログラム
【課題】工作機械のための数値制御プログラムに記述されたペアコマンドの相対関係を容易に確認することを課題とする。
【解決手段】対で使用されるペアコマンドA2を一組以上含む複数のコマンドA1の中から選ばれるコマンドA1で記述され記憶部(数値制御プログラム保存領域31)に記憶されている数値制御プログラムP1に記述されたペアコマンドA2を抽出し、前記ペアコマンドA2の組PA1毎に前記抽出されたペアコマンドA2を分けて前記数値制御プログラムP1に記載された順に並べて表示する。
(もっと読む)
ロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダント
【課題】作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置や向きの変更を繰り返すティーチング作業を行うことなく、自動的にティーチングを行うことが可能なロボット制御システムの教示方法およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】
教示方法の一実施形態は、トレイ20のマーカー23が含まれるように可搬型カメラ8で撮像する第1撮像工程と、その画像からマーカー23を検出して、トレイ20毎に予め登録されているデータとの照合などの判断を行う第1画像処理工程と、該当するマーカー23に応じた初期位置へロボットハンド31を移動させる初期移動工程と、ロボットハンド31の小型カメラ34によってマーカー23の少なくとも1つが含まれるように撮像する第2撮像工程と、その画像からマーカー23の位置誤差を検出する第2画像処理工程とを含む。
(もっと読む)
ロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システム
【課題】ティーチング作業をより簡略するとともにティーチング時間のさらなる短縮を可能とするためのロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】撮像装置を用いて教示を行うことが可能なロボット制御システムの教示用補助具の一実施形態であるティーチングツール50は、角錐面52a、52b、52cの色が互いに異なる三角錐部52を有するツール本体51と、このツール本体51に連結されたハンドル54とを備える。
(もっと読む)
板材加工機のワークホルダ段取り情報表示装置
【課題】 スケジュール運転において、ワークホルダの段取りがあることを作業者に事前に知らせることができる段取り情報表示装置を提供する。
【解決手段】 ワークホルダ13の移動部材13に対する現在の取付位置を記憶するワールホルダ取付位置記憶手段69を設ける。加工スケジュールSHの加工プログラムを先読みし、記述されたワークホルダ13の取付位置の情報を抽出して、上記記憶手段69の情報と比較し、ワークホルダ取付位置の変更が必要となることを示す情報を生成する段取り情報生成手段48を設ける。その情報を表示情報生成手段71により表示装置47に表示させる。
(もっと読む)
プログラム作成・教示装置及び方法
【課題】複雑な流れを持つロボットプログラムであっても、短時間で位置データの教示が可能なプログラム作成・教示装置及び方法を得ること。
【解決手段】作成したロボットプログラムを解析して、その中で使用される位置変数を抽出する工程(ステップS11)と、抽出した位置変数の中から、値を教示する必要のある位置変数を教示対象変数として選出する工程(ステップS12)と、ロボットプログラムの処理の流れに基づいて、教示対象変数を使用する命令が実行される順序に応じたグラフ構造で教示対象変数を配列させる工程(ステップS13)と、教示対象変数の教示受付時に、グラフ構造での配列に従って教示対象変数を順次表示する工程(ステップS14)とを有する。
(もっと読む)
軌跡表示装置及び該軌跡表示装置を備えた工作機械
【課題】工作機械の3次元軌跡の誤差を正確に定量化し、該誤差を表示又は出力できる機能を備えた軌跡表示装置を提供する。
【解決手段】軌跡表示装置20は、指令位置データ取得部22が取得した各指令位置について、隣接する2点を結ぶ線分を指令線分として定義する指令線分定義部28と、実位置データ取得部24が取得した各時刻における実位置から上記指令線分の各々に至る垂線を定義し、該垂線のうち最も短い垂線の長さと、該実位置と該実位置に最も近い指令位置とを結ぶ線分の長さのうち、より長さの短いものを指令経路に対する各実位置の誤差として計算する誤差計算部30とを有する。
(もっと読む)
自動プログラミング方法
【課題】仕上げ記号に相当する色を白動的に付加し、その情報を基に加工面に使用工具や切削条件を与えることが可能な自動プログラミング方法を提供する。
【解決手段】三次元CADを操作し、この三次元モデル10表面のCADデータまたはIGESデータをマウスで選択し、仕上げ記号または色を指示する。この色は仕上げ面記号と関連しており、色を前記モデル10に塗ることにより、CADデータまたはIGESデータに色の属性を与えることにより簡単に加工面の精度を定義できる。モデル10は、例えば射出成形機の構成要素部品であって、その各コーナー部には穴18が設けられており、その内周面に対応する色としてグリーン250が指定されている。手前側の取り付け面12に複数設けられたミリタップ穴12aは、その対応する色としてレッド250が指定されている。
(もっと読む)
工作機械の工具軌跡表示装置
【課題】回転軸を含む複数の駆動軸によって位置と姿勢が制御される工具先端部の3次元軌跡上の位置と各軸毎の波形データにおける時間軸上の位置との対応を視覚的に捉えることが可能な工作機械の制御装置および工具軌跡表示装置を提供する。
【解決手段】工作機械の各駆動軸21x〜21Bの各時刻における位置情報Sa、速度情報Sb、加速度情報Sc、位置偏差情報Sd、およびトルク指令Seを同時に時系列データとして取得し、加工物に固定された座標系からみた、工具の先端部の3次元の軌跡を求め、表示部13に表示されている工具の先端部の3次元の軌跡の任意の一部を選択することができ、選択された部分の工具の先端部の3次元の軌跡、および該選択された部分の工具の先端部の3次元の軌跡に対応する3次元座標値が取得された時間領域の前記時系列波形の表示属性を変えることを特徴とする工作機械の工具軌跡表示装置。
(もっと読む)
NCプログラムの解析編集装置、方法、プログラム、および記憶媒体
【課題】編集作業を容易にする。
【解決手段】本装置を、NCプログラム21を編集画面71に編集可能に表示するNCプログラム編集手段41と、概要情報を抽出し概要情報画面72に表示する概要情報編集手段43と、切削加工情報を抽出する切削加工情報抽出手段45と、CADデータ23から形状情報を抽出する形状情報抽出手段47と、切削加工情報、または形状情報の少なくとも一つの情報に基づき、工具軌跡データ層51、穴明図データ層52、またはワーク図データ層53を生成するとともに、描画画面73に重ね合わせ可能に描画表示する図形描画手段49と、切削加工情報をリスト画面74に表示する切削加工情報表示手段55と、表示領域をそれぞれ連動表示させる連動表示手段57と、ミル加工または穴明加工について解析し、対応する画面に表示させる切削加工解析手段59と、を備えるように構成する。
(もっと読む)
NCプログラムの表示装置
【課題】直進軸と回転軸とを備える工作機械において、回転軸の指令値による動作が原因であるかを視覚的に把握できるNCプログラムの表示装置を提供する。
【解決手段】NCプログラムの表示装置100は、回転軸データφA(N)、φB(N)に基づいて、ワーク座標系における工具50の傾き角に関する回転軸パラメータφA(N)、φB(N)、ΔφA(N)、ΔφB(N)、VA(N)、VB(N)、AA(N)、AB(N)、JA(N)、JB(N)の時間変化挙動を表示する表示手段を備える。
(もっと読む)
サンプル点において掃引容積の距離場を再構成する方法
【課題】掃引容積の高精度のモデルを表現し、レンダリングするための空間および時間効率の良い方法を提供する。
【解決手段】プロセッサ上で実行される方法が、サンプル点において物体の距離場を再構成する。物体は経路に沿って或る形状を動かすことによって生成される掃引容積である。形状を形状距離場によって表す。経路をパラメトリック関数によって表す。サンプル点における距離データを求め、距離データはサンプル点における物体の距離場を特徴付ける。経路に沿った形状の最適な配置を定義する最適な1組のパラメータを連続的に求める。形状距離場を最適な配置に変換して、変換された形状距離場を生成する。サンプル点において、変換された形状距離場から距離データを求め、サンプル点において距離場を再構成する。
(もっと読む)
加工ユニットの動作を表示し、ユーザ入力から処理データを生成する仮想工作機械
作業スペース(30)及びこの作業スペースに配置された加工ユニット(36)を有する工作機械の制御システムの処理を容易にするため、制御システムは、処理データ及び記憶された機械モデル(48)に基づき、少なくとも作業スペース(30)の領域内において、可視化要素(G,FF)によって可視化ユニット(50)上で、仮想作業スペース(54)内に設けられた仮想加工ユニット(56)を有する仮想工作機械として実際の工作機械(12)を表示すると共に、仮想加工ユニットの機能を仮想機能として表示する可視化コントローラ(36)を備える。マニュアル対話処理を可能とする対話処理ユニット(80)は可視化ユニット(50)と関連付けされ、マニュアル対話処理によって工作機械の機能の関連性を可能とする機能選択ユニット(90)が可視化ユニット(50)と関連付けされ、関連した機能を考慮しながら、マニュアル対話処理に対応する処理データ(ML,MST)を生成すると共に、可視化要素(G,FF)を使用しながら、可視化ユニット(50)上で、マニュアル対話処理によって特定された機能を表示するために、処理データ(ML,MST)を可視化コントローラ(40)に対して転送する処理データ(ML,MST)を生成する機能データ生成ユニット(92)を備える。  (もっと読む)
(もっと読む)
適応的にサンプリングされる距離場を用いて数値制御フライス加工をシミュレートするための方法
【課題】高精度に時間効率よくフライス加工をシミュレーションする。
【解決手段】物体を横切る経路に沿って或る形状を動かすことによって、その物体のフライス加工をシミュレートするための、プロセッサ上で実行される方法が提供される。物体を表現するために、複合的な適応的にサンプリングされる距離場(ADF)が生成され、その複合ADFは1組のセルを含む。複合ADF内の各セルは1組の距離場と、そのセル内の物体を再構成するための手続き型再構成法とを含む。形状は形状距離場によって表される。経路はパラメトリック関数によって表される。掃引容積再構成法に従って、経路に沿って形状を動かすことによって生成される掃引容積を表すために、掃引容積距離場が連続的に定義され、その掃引容積再構成法によって、サンプル点における掃引容積距離場が再構成される。複合ADFを編集して、掃引容積距離場を複合ADFに組み込み、シミュレートする。
(もっと読む)
工作機械の加工支援システム
【課題】NCデータや加工状況を適切に評価することが可能となり、工具の折損や加工中の振動などを防止できる工作機械の加工支援システムを提供することを目的とする。
【解決手段】工作機械10の実加工における加工状態を検出する加工状態検出手段20と、加工状態に基づいて、検出された加工状態と当該加工状態の検出時における前記工作物Wの加工位置情報との関連付け情報を記憶する関連付け手段30と、加工状態に応じた表示属性を記憶する表示属性記憶手段40と、関連付け情報および表示属性に基づいて、表示属性に応じた前記工作物Wの前記加工位置情報を表示する表示手段50と、を備える。
(もっと読む)
ロボット教示システム
【課題】ロボットの教示作業に必要な時間を短縮することが可能なロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ツール13と、制御部20とを備えている。制御部20は、加工対象Wの図面データ25を読み込む図面データ読込部21と、図面データ25を表示する表示部29と、表示部29上で参照マーク35を移動させる入力部22とを有している。特定領域設定部43は目標図形50に対して特定領域51を設定するとともに、通過位置設定部24は、図面データ25上の特定領域51に参照マーク35を一致させた場合に、当該特定領域51に対応する一の通過位置を定める。プログラム作成部31は、移動プログラム32を作成し、出力部33は、移動プログラム32をロボットコントローラ12に送信する。
(もっと読む)
加工誤差予測のためのコンピュータプログラム、加工誤差予測装置およびその予測結果に基づいて工具経路を修正する装置
【課題】工具の形状誤差や撓みに起因する加工誤差を高速に予測可能な装置などを提供する。
【解決手段】コンピュータ装置1の3次元グラフィックス機能を利用し、加工誤差を予測する位置における工具M(切刃の通過軌跡)、この位置の直前および直後を含む所定範囲の工具掃引体T1,T2、および被削物形状Wを、それぞれ下方からの視野範囲Vにおいて描画する。描画された画像において工具Mが手前に表示されている画素領域を、加工終了後に残る加工面の領域として検出し、この加工面の代表点(創成点C)における工具の形状誤差や撓み量から加工誤差を予測する。予測した加工誤差に基づいて工具経路を修正すれば、成形後の手修正に要する工数、時間を大幅に削減できる。
(もっと読む)
21 - 40 / 67
[ Back to top ]