
Fターム[3D232CC14]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 操舵性・安定性の向上 (4,043) | ヨー特性の向上 (70)
Fターム[3D232CC14]に分類される特許
1 - 20 / 70
電動パワーステアリング制御装置
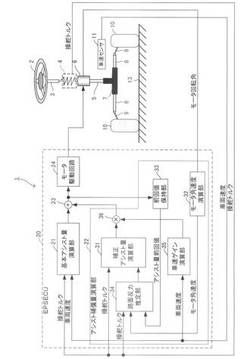
【課題】車両のヨー応答を低下させることなくロール振動を抑制する
【解決手段】EPSシステム1では、アシスト補償量演算部22が、車両の運転者によるハンドルの操作が反映された操舵トルクと、車両の挙動が反映された推定路面反力とに基づき、次の(a)および(b)の2つのゲイン特性を満たすようにアシスト補償量を演算する。(a)操舵トルクに対する補正アシスト量のゲイン特性については、操舵トルクの周波数が予め設定された第1設定周波数を超えると、周波数が高くなるにつれて補正アシスト量のゲインが徐々に減少する1次フィルタの形状を有する。(b)推定路面反力に対する補正アシスト量のゲイン特性については、推定路面反力の周波数が、第1設定周波数より高くなるように予め設定された第2設定周波数になるまでは、周波数が高くなるにつれて補正アシスト量のゲインが徐々に増加する、推定路面反力の微分特性を有する。
(もっと読む)
車両用前後輪転舵制御装置

【課題】ステアリング操作による前後輪自動追従制御時、ステア角とヨーレートの比例関係を保つことで、ドライバーに与える操作違和感を軽減すること。
【解決手段】車両用前後輪転舵制御装置は、前輪11,11及び後輪12,12がステアリング操作とは独立して転舵可能である4WS車1において、軌跡演算機21及び後輪舵角演算機22と、前輪舵角演算機23と、を備える。軌跡演算機21及び後輪舵角演算機22は、4WS車1の進行方向側に設定した車両前部定点αの軌跡を、4WS車1の進行方向とは反対側に設定した車両後部定点βがトレースするように、後輪転舵角ψを制御する。前輪舵角演算機23は、ステアリング操作による操舵角Θに基づく前輪転舵角(k1Θ)を、前後輪転舵角差を減じるように、後輪転舵角ψに応じて補正制御する。
(もっと読む)
車両の操舵制御装置
【課題】荷物の積載状態に拘わらず、安定した制御性能を得ることが可能な車両の操舵制御装置の提供。
【解決手段】車両質量演算部41は、変位センサ36が検出した相対変位HFL,HFR,HRL,HRRを用いて車両の質量を算出する。ヨー慣性モーメント演算部43は、車両質量演算部41が算出した車両の質量からヨー慣性モーメントを算出する。状態フィードバックゲイン演算部44は、車両質量演算部41が算出した車両の質量と、ヨー慣性モーメント演算部43が算出したヨー慣性モーメントIとを用いて、目標操舵角を入力量とする操舵系の状態方程式を設定し、設定した状態方程式に対する評価関数を設定し、設定評価関数を最小とする状態フィードバックゲインを、LQ制御側に従って算出する。目標操舵角演算部45は、算出された状態フィードバックゲインKを用いて、車両を目標進路に従って走行させるための目標操舵角を算出する。
(もっと読む)
車両の操舵力制御装置
【課題】制動制御によって操向車輪に制動力が付与される際における操向車輪のセルフアライニングトルクの不足を補償し得る車両の操舵力制御装置を提供する。
【解決手段】この装置では、車両の運転者による制動操作に依存することなく車両の状態に基づく制動制御によって操向車輪に付与される制動力Bq[f*]が調整される。車両の操舵操作部材に操舵力を付与する操舵力発生手段TQが備えられる。操舵角Saaと、制動制御によって操向車輪に付与される制動力Bq[f*]とに基づいて、操舵力発生手段TQにより操舵操作部材に付与される操舵力が調整される。この操舵力は、操向車輪に付与される制動力Bq[f*]が大きいほど、また、操舵角Saaが大きいほど、より大きい値に調整される。
(もっと読む)
車両用舵角制御装置
【課題】旋回時、車体の向きと横加速度応答の適正化により、運転のしやすさを向上させること。
【解決手段】車両用舵角制御装置は、転舵角センサと、車輪速センサと、操舵角センサ5と、目標横加速度演算部15と、目標車体横滑り角演算部16と、転舵角演算部17と、前輪ステアリング機構と、後輪転舵機構と、を備える。目標横加速度演算部15は、車速と操舵角に基づいて目標横加速度を演算する。目標車体横滑り角演算部16は、車速と操舵角に基づいて目標車体横滑り角を演算する。転舵角演算部17は、目標横加速度と目標車体横滑り角を実現するように前輪舵角指令値と後輪舵角指令値を演算する。前輪ステアリング機構と後輪転舵機構は、舵角指令値に基づき、左右前輪と左右後輪の実舵角を独立に制御する。
(もっと読む)
車両
【課題】後輪が操舵輪である車両において、旋回時の操縦性の低下を抑制する。
【解決手段】車両は、後輪の転舵により旋回させられるが、旋回方向は後輪の転舵方向とは逆向きになる。また、後輪の転舵に伴ってヨーレイトが生じるが、車両の重心に作用する横加速度は遅れる。横加速度が、過渡的に、逆向きに作用することがあるのである。それに対して、ヨーレイトγtgtに基づいてリーン角の目標値φrefが決定され、リーンアクチュエータが制御されるようにすれば、キャンバスラストが作用するため、その分、横加速度のヨーレイトに対する遅れを小さくすることができ、操縦性の低下を抑制することができる。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則した軌跡になるよう操舵輪の舵角及び左右輪の前後力差を制御する。
【解決手段】運転者の操舵操作量に対する前輪の舵角の関係を変更する舵角可変装置14又はバイワイヤ式の操舵装置76を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S350、450)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための前輪の目標舵角を演算し(S500)、一方の後輪の目標付加制動力を演算する(S1050)。そして目標舵角に基づいて前輪の舵角を制御し(S600)、目標付加制動力に基づいて後輪の制動力を制御する(S1060〜1100)。
(もっと読む)
ヨーレート検出装置
【課題】車両の走行状態にかかわらずにヨーレートセンサの較正を適切に行なう。
【解決手段】ヨーレート検出装置10は、車両の位置が所定精度以上で車両のヨーレートを算出可能なヨーレート算出範囲内に存在するか否かを判定するヨーレート算出範囲判定部23aと、車両の現在位置がヨーレート算出範囲内に存在するとヨーレート算出範囲判定部23aにより判定された場合に、車両の位置と道路データ記憶部22に記憶されている曲率情報とに基づき、車両のヨーレートを算出して算出値を出力するヨーレート算出部31と、ヨーレート算出部31から出力されたヨーレートの算出値と、ヨーレートセンサ11から出力されるヨーレート(検出値)Ysとの差に基づき、ヨーレート(検出値)Ysを補正し、該補正により得られる算出値を出力するヨーレートセンサ補正部38とを備える。
(もっと読む)
車両の制御装置
【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
車両の運動制御装置
【課題】具体的な制御指針をドライバに提示することにより、ドライバが自己の運転操作に対する指針を得られるような車両の運動制御装置を提供することにある。
【解決手段】中央コントローラ40の理想運動制御部42は、車両の前後方向の加加速度情報を用いて、車両の操舵を制御する。HVI(Human Vehicle Interface)55には、運転者に操舵を開始するタイミング決定のための情報が提示される。運転者は、HVI(Human Vehicle Interface)55により提示される情報に基づいて、操舵開始タイミングを制御する。情報提示手段は、運転者に操舵を開始するタイミング決定のための情報を提示する。情報提示手段により提示される情報に基づいて、運転者により前記操舵開始タイミングが制御される。
(もっと読む)
車両運動制御装置
【課題】制御対象の運動範囲が大きい場合であっても、最適な運動性能となるように車両の運動を制御する車両運動制御装置を提供する。
【解決手段】車両運動制御装置は、ヨーモーメント発生機構10と、状態センサ20と、制御部30とからなる。ヨーモーメント発生機構10は、車両の目標状態量を決定し車両にヨーモーメントを発生させる。状態センサは、ヨーモーメント発生機構による車両の現状態量及び現ヨーモーメントを計測又は推定する。制御部30は、目標状態量と車両の現状態量の偏差に現ヨーモーメントを乗算する仮想パワーgを考慮する制御則Uを用いてフィードバック制御を行う。
(もっと読む)
車両用接触回避支援装置及び車両用操舵アシスト装置
【課題】障害物との接触回避をより好適に支援することが可能な車両用接触回避支援装置を提供する。
【解決手段】車両用接触回避支援装置14は、車両10と車両10前方の障害物12との相対位置を検出する相対位置検出手段80と、前記相対位置に基づいて接触回避の支援の要否を判定し、接触回避の支援が必要であると判定したとき、回避方向への操舵アシストを制御する操舵アシスト制御手段20と、車両10にかかるヨーモーメントMyに影響を及ぼし且つ当該影響が操舵方向により異なる走行環境を検出する走行環境検出手段20、83とを備え、前記操舵アシスト制御手段20は、前記走行環境に基づいて前記回避方向への操舵のアシスト力Fasiを補正する。
(もっと読む)
車両制御装置
【課題】四輪操舵装置を備える車両を、操舵時に進行方向に対して好適に平行移動させる。
【解決手段】車両10は、前輪を操舵可能な前輪側操舵機構250,260と、操舵される前輪の舵角に対し、走行状態に応じて異なる舵角をとるように後輪を操舵可能な後輪側操舵機構270,280とを有する。この車両を制御する車両制御装置100は、予め設定された車両のヨー角を特定するための第1関数から、ヨー角を零とした場合における前輪の舵角と後輪の舵角との関係を表す第2関数に含まれる時定数τ1,τ2の値を、決定する時定数決定手段と、決定された値を時定数に代入した第2関数を用い、ヨー角を零とした場合における、操舵される前輪の舵角σfに対し後輪がとるべき舵角たる後輪目標舵角σrを決定する目標舵角決定手段とを備える。
(もっと読む)
車両物理量推定装置
【課題】スリップ角を精度よく推定することができる車両物理量推定装置を提供する。
【解決手段】車両物理量推定装置1は、車両物理量を推定するECU5と、車両Xのヨー角θを検出する車載カメラ4と、を備えている。この車両物理量推定装置1では、ECU5の車両物理量オブザーバ5aで推定したヨー角推定値θ^と車載カメラ4で検出したヨー角θとからオフセット誤差αが算出される。そして、このオフセット誤差αでもって、車両物理量オブザーバ5aで推定されたスリップ角推定値β^が補正される。つまり、スリップ角推定値β^が、検出したヨー角θ及び推定したヨー角推定値θ^に基づいて補正されることとなる。
(もっと読む)
電動パワーステアリング装置
【課題】運転者に車両の横滑り状態を正確に感知させることができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段14で検出した操舵トルクに基づいて操舵補助指令値を演算する操舵補助指令値演算手段21と、前記操舵補助指令値に基づいて前記ステアリング機構に操舵補助力を付与する電動モータを駆動するモータ制御手段29と、タイヤのグリップが失われた度合を表すグリップロス度を検出するグリップロス度検出手段23と、検出したグリップロス度の変化分を演算するグリップロス度変化分演算手段24と、前記グリップロス度及び前記グリップロス度変化分に基づいて横滑り指標を演算する横滑り指標演算手段25と、演算した横滑り指標の増加に応じて操舵力の抜け感を与えた後に操舵力のストッパ感を与えるように前記操舵補助指令値を補正する指令値補正手段26とを備えた。
(もっと読む)
電動車両の旋回補助装置
【課題】旋回応答性を確保しつつ車両のタイヤ磨耗を効果的に低減できる電動車両の旋回補助装置を提供すること。
【解決手段】操舵輪101,102の操舵角を調節するハンドル108と、操舵角に基づいて目標車輪スリップ角を算出する目標車輪スリップ角算出手段151と、車両状態量を検出する車両状態検出手段と、車両状態量に基づいて実車体スリップ角を算出する実車体スリップ角算出手段152と、実車体スリップ角と操舵角に基づいて実車輪スリップ角を算出する実車輪スリップ角算出手段153と、目標車輪スリップ角と実車輪スリップ角の差分から必要ヨーモーメントを算出する必要ヨーモーメント算出手段154と、必要ヨーモーメントを発生させるためのトルク補正量を算出するトルク補正量算出手段155とを備え、モータ105,106によって、トルク補正量に基づいて補正されたトルクを駆動輪103,104に個別に与える。
(もっと読む)
ステアリング制御装置及びステアリング制御方法
【課題】ステアリング操作初期の応答性の向上と、ステアリング操作後期のヨーレイトによる車両の巻き込み現象の回避との両立を図る。
【解決手段】ステアリングホイール1の操舵速度θ′に対する操向輪7の転舵速度の比である速度比について、ステアリング操作初期の速度比をステアリング操作後期の速度比よりも大きな値に制御する。ステアリング操作初期の速度比は、ステアリングホイール1の操舵速度θ′の絶対値に比例した値で補正して、ステアリング操作後期の速度比は、ステアリングホイール1の操舵加速度θ″の絶対値に比例した値で補正する。
(もっと読む)
ヨーレート制御装置
【課題】車両がバンクのあるカーブ路を走行する場合に、運転者の違和感を低減できるヨーレート制御装置を提供する。
【解決手段】規範ヨーレートYrefと実ヨーレートの偏差に応じた駆動力配分制御量Imを算出し、バンク走行検出部10が推定するバンク角度βの絶対値が所定値より大きくなった場合は、バンク角度βの絶対値の大きさに対応したバンク角補正ゲインBgを算出して駆動力配分制御量Imに乗算し、駆動力配分制御量Imを低減するECU30を備えるヨーレート制御装置とする。
(もっと読む)
後輪操舵装置
【課題】自車両が備える後輪の操舵状態を制御することにより、被牽引車両の横方向への挙動を抑制することが可能な後輪操舵装置を提供する。
【解決手段】被牽引車両を牽引する自車両の後輪4を操舵する後輪操舵装置1であって、被牽引車両の横方向への挙動を検出する被牽引車両横挙動検出手段28と、被牽引車両横挙動検出手段28が検出する被牽引車両の横方向への挙動に基づいて、後輪4の操舵状態を制御する後輪操舵状態制御手段30とを備え、後輪操舵状態制御手段30は、自車両の横方向への挙動が、被牽引車両の横方向への挙動に対して逆位相または略逆位相となるように、後輪4の操舵状態を制御する。
(もっと読む)
車両挙動制御装置
【課題】 制動時における望ましくない車体挙動を抑制するための車両挙動制御装置を提供する。
【解決手段】 ステップS4でスピンモーメントMsの算出を終えると、VSA−ECU31は、ステップS5で、式(4),(5)が満たされるように、前輪3fl,3frの目標前輪舵角δftと後輪3rl,3rrの目標後輪トー角Trtとを設定した後、ステップS6でこれらを操舵ECU32に出力する。これにより、μスプリット路51での制動時であっても、自動車1の車体2にはヨーモーメントも横力も作用せず、直進状態を維持したまま減速あるいは停止できるようになる。
fl・Ffb=−(fl・Ffs+fr・Frs)・・・(4)
Ffs=−Frs・・・(5)
(もっと読む)
1 - 20 / 70
[ Back to top ]