
Fターム[3D232DA05]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | 前輪舵角 (3,968) | タイヤ舵角 (969) | タイロッド軸方向変位 (123)
Fターム[3D232DA05]に分類される特許
1 - 20 / 123
車両用前後輪転舵制御装置
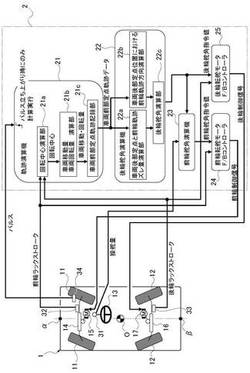
【課題】ステアリング操作による前後輪自動追従制御時、ステア角とヨーレートの比例関係を保つことで、ドライバーに与える操作違和感を軽減すること。
【解決手段】車両用前後輪転舵制御装置は、前輪11,11及び後輪12,12がステアリング操作とは独立して転舵可能である4WS車1において、軌跡演算機21及び後輪舵角演算機22と、前輪舵角演算機23と、を備える。軌跡演算機21及び後輪舵角演算機22は、4WS車1の進行方向側に設定した車両前部定点αの軌跡を、4WS車1の進行方向とは反対側に設定した車両後部定点βがトレースするように、後輪転舵角ψを制御する。前輪舵角演算機23は、ステアリング操作による操舵角Θに基づく前輪転舵角(k1Θ)を、前後輪転舵角差を減じるように、後輪転舵角ψに応じて補正制御する。
(もっと読む)
車両用操舵装置及び荷役車両

【課題】操舵角に対する反力特性を適切に設定することにより、運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、操舵角検出部13によって検出された操舵角が第1の切替角θh1以下の第1の舵角領域Iにあるか、第1の切替角θh1を超える第2の舵角領域IIにあるかを判定し、操舵角が第1の舵角領域Iにあるときに操舵角の増加に伴って操舵反力を最大値まで立ち上げ、操舵角が第2の舵角領域IIに入ると操舵角の増加に伴って操舵反力が前記最大値から単調に減少するように反力アクチュエータを制御する。
(もっと読む)
操舵反力生成装置、車両及び操舵反力生成方法
【課題】基準ラック軸力をより高精度に推定すること。
【解決手段】基準ラック軸力演算部15Bの車体持ち上げエネルギ演算部15aは、操舵角に基づき、転舵されることにより発生する車体1Aの上下方向の変位による車体持ち上げエネルギを算出し、タイヤ摩擦エネルギ演算部15bは、操舵角に基づき、転舵によってそれら転舵輪と走行路面との間に発生する摩擦によるねじりトルクを算出し、セルフアライニングエネルギ演算部15cは、操舵角及び車速に基づき、セルフアライニングトルクを算出し、加算部15dは、車体持ち上げエネルギ、ねじりトルク、セルフアライニングトルクを加算して総エネルギ量を求め、ラック軸力演算部15eは総エネルギ量とラックストローク量とに基づき基準ラック軸力を推定する。
(もっと読む)
電動パワーステアリング制御装置
【課題】路面反力トルクを正しく推定することができる電動パワーステアリング装置を提供する。
【解決手段】ドライバがハンドルに入力するトルクであるハンドルトルク、モータに生じるトルクであるモータトルク、路面反力トルクに応じてそれぞれ検出値が変化する3つのセンサ(トルクセンサ4、回転角速度センサ13、モータ電流センサ14)と、これら3つのセンサの検出値が入力され、これらの検出値に基づいて路面反力トルク推定値Tl_estを出力する路面反力推定器101とを備える。この路面反力推定器101として、推定する値の入力に対しては入力値と略等しい出力値を出力する応答性を備えるとともに、推定する値以外の入力に対しては略ゼロを出力する分離性を備える推定器であって、推定する値が路面反力トルクとされた推定器を用いる。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角が大きな範囲は、転舵速度に基づく操舵制御を実行することにより運転者の操舵負担を減らす。
【解決手段】タイヤを転舵させる転舵駆動機構と、操舵部材の操舵角を検出する操舵角センサと、操舵角が所定の切替角αを越える高角領域にあるか否かを判定し、操舵角が高角領域にあるとき操舵角センサで検出した操舵角の増減を判定する切り込み/切り戻し判定処理部(B3)と、操舵角が高角領域で増加傾向にあるとき、操舵角が高角領域にある時間に応じてタイヤの転舵角が増大するように転舵駆動機構を制御し、操舵角が高角領域で減少傾向にあるとき、操舵角が高角領域にある時間に応じてタイヤの転舵角が減少するように転舵駆動機構を制御するための目標転舵角を算出する目標転舵角算出処理部(B4)とを備える。
(もっと読む)
操舵絶対角検出装置および車両用操舵装置
【課題】検出が容易な操舵絶対角検出装置を提供する。
【解決手段】操舵軸の回転角区間(例えば1回転360°毎)にそれぞれ応じたラック軸8の軸方向区間を設けた。軸方向区間毎に仕様の異なる複数の被検出面(平坦面341〜344)を、ラック軸8の表面8bに設けた。距離検出器33が、何れの被検出面(平坦面341〜344)を検出するかによって、ラック軸8の軸方向区間(操舵軸の回転角区間に相当)を特定する。特定された回転角区間に対応する回転角基準値に、トルクセンサの第1レゾルバにより検出された回転角値を加算して、操舵絶対角を求める。
(もっと読む)
車両用故障診断装置
【課題】車両運転者が、バイワイヤシステムの故障検出のために必要な操作を容易に行うことができる技術を提供
【解決手段】バイワイヤ制御部15は、起動スイッチのオン後に、ステアリング可動域制限部11(アクセル可動域制限部12、ブレーキ可動域制限部13)により、ステアリングST(アクセルペダルAP、ブレーキペダルBP)の操作を0°〜54°(0%〜10%、0%〜10%)の範囲内に制限する。そして、ステアリング操作量(アクセル操作量、ブレーキ操作量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)内であると判断した場合に、転舵量(駆動量、制動量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)に応じて予め設定されたステアリング正常判定範囲(アクセル正常判定範囲、ブレーキ正常判定範囲)内であるか否かを判断する。
(もっと読む)
ステアリング装置
【課題】路面摩擦係数に拘わらずに舵角センサの異常の誤判定を防止できるステアリング装置を提供することを課題とする。
【解決手段】ステアリングホイール3の操舵に応じて前輪1を転舵する電動パワーステアリング装置100であって、操舵トルクを検出するトルクセンサSTと、操舵角を検出する舵角センサ24と、操舵トルクの絶対値が第1閾値以下でかつ操舵角の絶対値が第2閾値以上であることを判定条件として舵角センサ24の異常を判定する舵角センサ異常判定部および前輪1を含んだ車輪と路面との摩擦力が所定値以下か否かを判定するグリップ判定部を有する操舵制御ECU130を備える。そして舵角センサ異常判定部は、前記摩擦力が前記所定値以下とグリップ判定部が判定した場合に、判定条件を厳しくして舵角センサ24の異常を判定しにくくすることを特徴とする。
(もっと読む)
駐車支援システム
【課題】駐車支援システムにおいて、駐車支援の際に、運転者の衣類がステアリングホイールに巻きついたり、ステアリングホイールが運転者の手にぶつかったりする等の予期せぬ事態が発生するおそれをなくすることにある。
【解決手段】ステアリングホイール(7)と操舵輪(15L、15R)とが機械的に切り離され、ステアリングホイール(7)の回転に応じて操舵輪(15L、15R)を操舵する操舵モータ(22、23)を備えたステアバイワイヤシステム(2)であり、自動駐車手段(31)の実行中には、操舵モータ(22、23)により操舵輪(15L、15R)が操舵されてもステアリングホイール(7)は中立位置にある。
(もっと読む)
車両のパワーステアリング制御装置
【課題】ステアリング位置の変更等が行われてもコラム剛性を適切に維持し、振動、騒音が悪化することなく、操舵の車両応答性や舵のしっかり感を良好に保つ。
【解決手段】基本アシストトルクTbを0に設定する不感帯をステアリング位置Ptと車速Vに基づいて可変設定し、車速Vと操舵トルクTsに応じて基本アシストトルクTbを設定し、ステアリング位置Ptと車速Vに基づいて基本アシストトルクTbに対して乗算補正するトルク補正係数Acを演算し、ステアリング−ラックねじれ量Sと車速Vに基づいて基本アシストトルクTbに対して増減補正する増減補正量Bcを演算し、基本アシストトルクTbにトルク補正係数Acを乗算し、この値を増減補正量Bcで増減補正してアシスト指示値Taを演算し、該演算したアシスト指示値Taをモータ駆動部21に出力して電動モータ13を駆動して操舵トルクをアシストする。
(もっと読む)
車両用操舵装置および車両用操舵方法
【課題】 ドライバに違和感を与えることなく操舵負担の軽減を図ることができる車両用操舵装置および車両用操舵方法を提供する。
【解決手段】 ドライバの操作入力を受けるステアリングホイール1と、ステアリングホイール1と機械的に分離し、前輪9を転舵するラックギア8と、ステアリングホイール1の操舵角θを検出する反力モータ角度センサ4と、ステアリングホイール1に入力される操舵トルクTを検出するトルクセンサ2と、操舵角θが第1操舵角θ1未満の場合には操舵角θに基づいて目標転舵角δ*を生成し、操舵角θが第1操舵角θ1以上の場合には操舵トルクTに基づいて目標転舵角δ*を生成する転舵コントローラ12と、を備える。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 転舵モータ失陥時にも転舵可能なフェールセーフ機能を有し、かつトー角の調整が可能なステアバイワイヤ式操舵装置を提供する。
【解決手段】 操舵軸10と機械的に連結されないステアリングホイール1と、その操舵角を検出する操舵角センサ2と、ステアリングホイール1に反力トルクを与える操舵反力モータ4と、2つの転舵モータ6A,6Bと操舵反力モータ4を制御するステアリング制御部5aとを備える。転舵モータ6Aの出力を操舵軸10に伝達する出力伝達機構15と、他の転舵モータ6Bの出力を操舵軸10に伝達する出力伝達機構16とを設け、転舵を行う。両転舵モータ6A,6Bの出力軸を滑りねじ機構24を介して結合する。両転舵操モータの一方が失陥したとき、他方の出力を滑りねじ機構24を介して失陥した転舵モータに対応する出力伝達機構15(16)に伝達する。
(もっと読む)
障害物回避支援装置
【課題】乗員に違和感を与えることなく、又は、与える違和感を少なくして車高を上げることが可能な障害物回避支援装置1aを提供する。
【解決手段】車高調整装置9を制御して車高を調整し、車両Cに障害物を跨いで回避させる障害物回避支援装置1aにおいて、車両Cの状態量に応じて、障害物を跨ぐ際の車高を変化させ、車両Cが旋回中には、車両Cの車輪11、21の舵角を調整する舵角制御装置1bを制御して、障害物に内輪近傍を通過させ、車高を変化させる際には、車両Cの後輪21の舵角を調整する舵角制御装置1bを制御して後輪21をトーインにする。
(もっと読む)
舵角比可変制御装置
【課題】車両の運転性能の向上を図る。
【解決手段】制御装置20は、車速センサ15によって検出された車速Vに基づいて基本ステアリングギヤ比を設定するとともに、圧力センサ14によって検出されたステアリング把持力Hに基づいてギヤ比補正係数を設定し、その設定した基本ステアリングギヤ比とギヤ比補正係数とを乗じることによりステアリングギヤ比を設定する。
摩擦係数の低い路面における低速走行中であっても、違和感を生じさせないような操舵が可能となり、車両の運転性能の向上を図ることができる。
(もっと読む)
車両制御装置
【課題】後輪転舵装置に温度検出手段を設けずに、後輪転舵装置の過熱を抑制する車両制御装置を提供する。
【解決手段】車両制御装置において、電動パワーステアリング装置は、運転者による操舵量に応じて前輪用モータを駆動し、車両のステアリング機構に操舵補助力を与える。後輪転舵装置は、後輪用モータ68を駆動し、後輪を転舵する。温度センサ30は、前輪用モータ28の温度を検出する。後輪転舵装置は、後輪用モータ68への通電を制御するEPS−ECU56を有する。EPS−ECU56は、温度センサ30の出力にもとづいて後輪用駆動機構への通電量を導出し、温度センサ30で検出した温度が第1の所定値を超えると、後輪用モータ68への通電量を制限する。
(もっと読む)
操舵制御装置
【課題】互いに干渉しない独立した二つの操舵機構を備え、双方において操舵補助力の伝達ロスの発生を防止し得る操舵制御装置を提供する。
【解決手段】ステアリングホイール1に連係される第1操舵軸3と、いわゆるラックピニオン機構を介して転舵輪2L,2Rに連係される第2操舵軸7と、がクラッチ11を介して分離してなる操舵制御装置であって、運転者の操舵力を補助する二つの第1、第2操舵機構8,10を設けると共に、第1操舵機構8を第1操舵力発生モータ16によってピニオン軸6に回転力を付与する構成とし、第2操舵機構10を油圧によってラックバー5に推進力を付与する構成とした。
(もっと読む)
パワーステアリング装置
【課題】車両挙動制御装置が故障した場合に運転者にかかる負担を軽減する。
【解決手段】後輪トー角可変制御装置を有する自動車に搭載された電動パワーステアリング装置において、後輪トー角可変制御装置が故障し、後輪トー角可変制御装置の作動によって発生するヨーモーメントを打ち消すような修正操舵(直進走行時における操舵トルクT)が必要となった場合、トルク補正目標電流設定部33が、当該修正操舵に対する平均操舵トルクTavを軽減する方向の補正トルクTcを設定した上で、補正トルクTcに対応するトルク補正目標電流ターゲットActを設定し、これを漸増・漸減処理部34が処理したトルク補正目標電流Acを目標電流Atに付加するようにする。
(もっと読む)
電動パワーステアリング装置
【課題】操舵フィーリングの低下を伴うことなく、路面反力の急変に対する車両の安定性を向上する電動パワーステアリング装置を提供する。
【解決手段】規範路面反力算出部101において、操舵輪の舵角θs、車速Vにもとづく規範路面反力TLrefを算出し、路面反力推定部103において、モータ電圧Vm、モータ電流Im等にもとづく実路面反力TLestを算出する。比較判定部105において、それらの変化量ΔTLrefと変化量ΔTLestの変化方向が同じか、互いに逆かを判定し、又、|ΔTLref|と|ΔTLest|との大小関係を判定する。指示電流補正値出力部107において、その判定結果にもとづいて、{|ΔTLest|−|ΔTLref|}の偏差に応じた切り込み方向の指示電流補正値ΔImCrを出力したり、又は、|ΔTLref−ΔTLest|の偏差に応じた戻し方向の指示電流補正値ΔImCrを出力したりする。
(もっと読む)
パワーステアリング装置
【課題】高効率で且つ操舵フィーリングに優れたパワーステアリング装置を提供する。
【解決手段】操舵補助力を発生用の油圧ポンプ22を駆動するための電動モータ24を、ECU25がPWM制御する。ECU25は駆動方式を120度通電方式および180度通電方式に択一的に切り替える駆動方式切替部38を備える。駆動方式切替部38は、回転速度演算部35により演算された回転速度に基づいて駆動方式を切り替える通常制御部381と、通常制御部381による切替に拘らず電流検出回路29により検出された電流に基づいて駆動方式を切り替える最適化制御部382とを含む。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 車輪を転舵する転舵モータが失陥しても、トー角調整用モータを転舵の駆動源に転用して転舵を行うことができるステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用の操舵軸10と機械的に連結されていないステアリングホイール1と、ステアリングホイール1の操舵角を検出する操舵角センサ2と、ステアリングホイール1に反力トルクを付与する操舵反力モータ4と、操舵軸10を駆動する転舵モータ6および操舵反力モータ4を制御するステアリング制御部5aとを備える。転舵モータ6とは別に、トー角を調整するトー角調整用モータ7を有するトー角調整機構16を設ける。転舵モータ6が失陥したとき、転舵モータ6を操舵軸10から切り離しトー角調整用モータ7で転舵を行なわせる切換手段17を設ける。
(もっと読む)
1 - 20 / 123
[ Back to top ]