
Fターム[3D232DA23]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | 車速 (4,162)
Fターム[3D232DA23]の下位に属するFターム
車輪速 (751)
Fターム[3D232DA23]に分類される特許
1 - 20 / 3,411
電子制御装置、および、これを用いた電動パワーステアリング装置
車両のパワーステアリング制御装置
電動パワーステアリング用モータの故障診断装置
ヨー応答ゲインの評価方法
車両用操舵装置
車両用操舵装置
車両用操舵装置
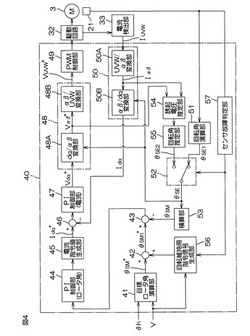
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
操舵制御装置

【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部(16)は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部(110)と、操舵輪(W)の実舵角を検出する実舵角検出部(21)と、目標舵角設定部(110)によって設定された目標舵角と、実舵角検出部によって検出された実舵角との偏差に基づいて算出される操舵部(2)の動作量を制御する操舵制御値を操舵部(2)に出力する操舵制御値演算部(120)と、操舵制御値演算部(120)によって算出される所定時間当たりの操舵制御値の変化を制限する傾き制限部(209)と、を備える。
(もっと読む)
電動パワーステアリング制御装置
【課題】運転者の意思を適切に反映したアシスト制御を可能にする
【解決手段】EPSシステム1では、目標アシストトルク演算部20が、トルクセンサにて検出された操舵トルクTsに基づき、操舵トルクに応じた値の目標アシストトルクを示す目標電流を演算し、モータ駆動回路50が、演算された目標電流に基づいてモータ6を駆動させる。また、操舵角センサが操舵角θsを検出するとともに、微分器62が操舵角速度ωsを演算し、さらに操舵状態量演算部22が、操舵角θsと操舵角速度ωsとに基づいて、操舵状態量を演算する。そして目標アシストトルク演算部20は、演算された操舵状態量に基づき、目標アシストトルクを示す目標電流を変更する。したがって、操舵トルクTsだけではなく操舵角速度ωsによっても目標アシストトルクを変更することができる。
(もっと読む)
車両用操舵装置
【課題】転舵輪側からタイロッドに入力する高周波振動を新規な方法で推定して操作部材に伝達することができ、操舵感が向上する車両用操舵装置を提供する。
【解決手段】ラックハウジング18に加速度センサ30が取り付けられている。FFT処理部52Aは、加速度センサ30の出力信号を、時間領域信号から周波数領域信号に変換する。逆入力振動成分抽出部52Bは、FFT処理部52Aによって得られた周波数領域信号から、周波数fが所定範囲内(fL≦f≦fH(fH>fL))にあり、かつパワー密度ρが所定範囲内(ρL≦f≦ρH(ρH>ρL))にある信号を抽出する。IFFT処理部52Cは、逆入力振動成分抽出部52Bによって抽出された周波数領域信号を時間領域信号(逆入力振動推定値)に変換する。
(もっと読む)
電動パワーステアリング装置
【課題】加速度センサをタイロッドに比べて動きの小さいラックハウジングに取り付けることができるとともに、加速度センサの出力信号からタイロッドの加速度を推定することができるようになる電動パワーステアリング装置を提供する。
【解決手段】ラックハウジングに加速度センサ30が取り付けられている。加速度センサ30はラックハウジング加速度を検出する。位相進み補償処理部52Aは、タイロッド加速度に対するラックハウジング加速度の位相遅れ分だけ、ラックハウジング加速度の位相を進めるための位相進み補償処理を行なう。ゲイン補正処理部52Bは、タイロッド加速度に対するラックハウジング加速度のゲイン減少分だけ、ラックハウジング加速度のゲインを増加させるためのゲイン補正処理を行なう。
(もっと読む)
操舵制御装置
【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部16は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部110と、操舵輪(W)の実舵角を検出する実舵角検出部21と、目標舵角設定部110によって設定された目標舵角と、実舵角検出部21によって検出された実舵角との偏差を算出し、偏差に基づく積分値に基づいて算出される操舵部の動作量を制御する操舵制御値を、操舵部に出力する操舵制御値演算部120と、操舵制御値演算部120によって算出される積分値の上限を制限する積分値制限部205と、を備える。
(もっと読む)
自動車
【課題】 その場回転または横方向移動等の非通常走行形態で走行できる自動車において、非通常走行形態と通常走行形態の間での走行形態の切り換えが、運転者が意図した状態で行えて、不測に切り換わることがないようにする。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される。これにより、その場回転や横方向移動となる非通常走行の運転を可能となる。この前提構成の自動車において、通常走行運転モードと非通常走行運転モードとの切換を、運転者の操作によって切り換える走行モード切換手段41を設ける。
(もっと読む)
電動パワーステアリング装置
【課題】1シャント式電流検出回路でモータ各相電流の検出を行うと共に、電流検出回路の故障(異常)を簡易な構成で確実に行い、安全性を高めた電動パワーステアリング装置を提供する。
【解決手段】インバータに接続された1つのシャント抵抗と、シャント抵抗の両端に正方向に接続され、モータの相電流を検出してアシスト制御の制御用モータ電流検出値とする制御用モータ電流検出回路と、シャント抵抗の両端に逆方向に接続され、制御用モータ電流検出回路の故障を検出するための診断用モータ電流検出回路とを具備し、1シャント式でモータの各相電流を検出してアシスト制御を行うと共に、シャント抵抗の両端電圧を増幅する回路を2系統とする。
(もっと読む)
油圧式パワーステアリング装置
【課題】切り込み状態から操舵部材が中立位置に向かって戻される場合に、切り込み方向の操舵補助力が不足するのを抑制できる油圧式パワーステアリング装置を提供する。
【解決手段】ダンピング制御部62は、検出操舵トルクThの方向が切り込み方向でありかつその大きさ(絶対値)が第1の閾値以上であり、操舵角速度ωhの方向が切り戻し方向でありかつその大きさ(絶対値)が第2の閾値以上のときに、操舵角速度ωhに応じたダンピングトルク指令値TD*を設定する。加算部63は、基本アシストトルク指令値設定部61によって設定される基本アシストトルク指令値TAO*に、ダンピング制御部62によって生成されるダンピングトルク指令値TD*を加算する。
(もっと読む)
四輪操舵制御装置
【課題】パワーステアリング装置が故障する場合に備えて、四輪操舵装置の後輪の転舵機能を利用して、車両の転舵ができる四輪操舵制御装置を提供する。
【解決手段】操舵部材2の操作に基づく操舵トルクを検出するトルクセンサ10と、操舵角を検出する操舵角センサ4と、トルクセンサ10の検出値に基づいて前輪を転舵するための補助力を得る操舵補助制御部31と、操舵角センサ4若しくはトルクセンサ10の検出値に基づいて後輪を転舵制御する転舵制御部41とを備え、転舵制御部41は、操舵補助制御部31の機能に故障があると判定された場合に、後輪を逆相側でのみ転舵制御する。
(もっと読む)
モータ制御装置及び車両の電動パワーステアリング装置
【課題】インバータ回路のトランジスタに発生する異常をより確実に検出することのできるモータ制御装置を提供する。
【解決手段】このモータ制御装置15は、インバータ回路20に設けられた対をなすトランジスタT1〜T6のスイッチングを制御することでモータ11に三相の交流電流を供給する。また、モータ11に供給される各相電流値を電流センサ30u,30v,30wを通じて検出し、検出される各相電流値に基づいてトランジスタT1〜T6に貫通電流が発生していると判断されるとき、インバータ回路20の駆動を停止させる。ここでは、各相電流値に対して第1の閾値を設定するとともに、各相電流値の総和に対して第2の閾値を設定する。そして、各相電流値の絶対値の少なくとも一つが第1の閾値以上であって且つ、各相電流値の総和の絶対値が第2の閾値以上であるとき、トランジスタT1〜T6に貫通電流が発生していると判断する。
(もっと読む)
追従制御装置
【課題】自車両を先行車に適切に追従させる。
【解決手段】追従制御装置(100)は、通信により取得された先行車(20)に係る舵角情報に基づいて、自車両(10)を先行車に追従させる制御である追従制御を実施可能な追従制御装置である。該追従制御装置は、追従制御が実施されておらず、且つ、自車両の直進走行時における(i)先行車に係る舵角情報及び(ii)自車両に係る舵角を、夫々取得する取得手段(15)と、取得された先行車に係る舵角情報と取得された自車両に係る舵角との差分を算出し、該算出された差分を自車両の舵角中点として設定する設定手段(15)と、を備える。
(もっと読む)
パワーステアリング装置
【課題】油圧制御バルブに発生した異常を車両運転中であっても検出することのできるパワーステアリング装置を提供する。
【解決手段】制御部は、判定部としての機能を有するとともに、スプールを目標回転角度θtまで変位させようとするときの電動モータの駆動電流値Iaに基づいて電動モータに発生しているトルクTaを推定する。そして、この推定されるトルクTaと予め設定されたトルクTtとの差が所定値α以上のときに油圧制御バルブに異常が発生している旨判定する。
(もっと読む)
ハイブリッド車両のパワーステアリング装置
【課題】ハイブリッド車両の走行状態に関わらず、良好な燃費性能を確保しつつ、大きな操舵トルクを出力可能なハイブリッド車両のパワーステアリング装置を提供する。
【解決手段】ハイブリッド車両1のパワーステアリング装置20は、モータ回生走行時やモータ発進時にエンジン2が停止状態にあり、且つ、クラッチ3が切断状態にある場合、ハイブリッド車両1の走行速度に応じて、パワーステアリング装置において操舵トルクを増幅する増幅手段24の駆動源である、電動モータ25とエンジン2を選択的に切り替える。
(もっと読む)
1 - 20 / 3,411
[ Back to top ]