
Fターム[3D232DA40]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | 車輪横滑り角、角速度、角加速度 (95)
Fターム[3D232DA40]に分類される特許
1 - 20 / 95
ラック軸力推定方法及び電動パワーステアリング装置
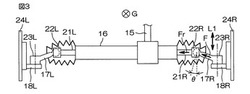
【課題】ステアリングホイールの回転運動をステアリングラック軸及びこれに連結されるタイロッドの直線運動に変換し、操舵輪の転舵を行う電動パワーステアリング装置において、常に精度の良いパワーアシスト制御を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】車両の走行状態を表す物理量に基づいてステアリングラック軸16に作用するラック軸力Fを演算により推定し、ラック軸16と前記タイロッド17Rとの、車体の進行方向に垂直な面内に投影した交差角θを求め、前記交差角θに基づいて、推定された前記ラック軸力Fを補正する。
【効果】車両の走行中、車両が左右に傾いてサスペンションストロークが発生したときにラック軸力を過大に評価することがなくなる。
(もっと読む)
インホイールシステムを用いた車両制御方法

【課題】 車両の旋回安定性を確保しながらも、回転半径を最小化させることのできるインホイールシステムを用いた車両制御方法を提供する。
【解決手段】車両の各ホイールの内部にモータを装着して制御するインホイールシステムを用いた車両制御方法において、車両走行情報を基に車両の旋回モードを判断するステップと、旋回モードに対する車両の現在のアッカーマン率を計算するステップと、現在のアッカーマン率を基に制御命令を生成するステップと、制御命令を用いて各ホイールのモータをそれぞれ制御するステップと、を含むことを特徴とする。
(もっと読む)
路面摩擦係数推定装置及び方法
【課題】タイヤすべり角に対するコーナーリングフォースの傾きが路面摩擦係数の関数となることを利用して、路面摩擦係数を推定する。
【解決手段】タイヤの横滑り角βとコーナーリングフォースCFを算出し、前記算出されたタイヤの横滑り角βとコーナーリングフォースCFとの比ΔCF/Δβに基づいて、路面の摩擦係数を推定する路面摩擦係数推定部28を備える。前記路面摩擦係数推定部28は、路面摩擦係数μが異なる複数の路面を走行してタイヤの横滑り角βとコーナーリングフォースCFとを検出してそれらの関係を数値で若しくは数式化してメモリ29に保存しており、前記メモリ29に保存された関係を用いて、実際の走行時に路面の摩擦係数を算出する。
(もっと読む)
車両用路面反力推定装置
【課題】本発明は、路面からステアリングラックにかかる力を精度良く推定可能とすることを目的としている。
【解決手段】このため、車速検出手段と、ハンドル切れ角検出手段と、車速検出手段の車速とハンドル切れ角検出手段のハンドル切れ角とを用いてセルフアライニングトルクを算出するセルフアライニングトルク算出手段と、路面反力推定手段を備える車両用路面反力推定装置において、車速に基づいて変換係数を設定する変換係数算出手段と、セルフアライニングトルク算出手段のセルフアライニングトルクの単位時間当たりの変化量を算出するセルフアライニングトルク変化量算出手段を備え、路面反力推定手段は、セルフアライニングトルク算出手段のセルフアライニングトルクと変換係数算出手段の変換係数とセルフアライニングトルク変化量算出手段のセルフアライニングトルク変化量とドライフリクション値と粘性摩擦係数とに基づいて路面反力を推定する。
(もっと読む)
車両の挙動制御装置
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
車両用操舵装置
【課題】タイヤの横力に応じた反力をドライバに返すことにより、優れた操舵フィーリングを持つ車両用操舵装置を提供する。
【解決手段】操舵トルクを検出するためのトルクセンサ13と、車速を検出するための車速センサ14と、操舵補助力を発生するための操舵補助電動モータ20と、トルクセンサ13の検出操舵トルク及び車速センサ14の検出車速とに基づいて操舵補助電動モータ20を駆動制御するEPS制御部21とを備える。EPS制御部21は、操舵トルクと車速とに基づいてタイヤの滑り角βを推定し、推定されたタイヤの滑り角βと検出車速とを用いてタイヤの横力Fを推定する。推定されたタイヤの横力Fに基づいてアシスト量を調整し、操舵補助電動モータ20を駆動する。
(もっと読む)
車両の操舵制御装置
【課題】車両挙動の安定化に係る各種の後輪舵角制御を、車両挙動の安定化に効果的に活用する。
【解決手段】後輪舵角可変装置を介して後輪の舵角δrを変化させることが可能な車両を制御する車両の操舵制御装置は、前記後輪のスリップ角βrを特定する特定手段と、前記特定されたスリップ角の信頼度を判定する判定手段と、前記特定されたスリップ角と前記判定された信頼度とに基づいて、前記スリップ角が増加する方向への前記後輪の舵角の変化を制限する制限手段とを具備する。
(もっと読む)
車両用操舵装置
【課題】例えば車両のスリップやスピンが発生した場合における運転者の操舵フィーリングを向上させる。
【解決手段】車両用操舵装置は、車両に搭載され、操舵ハンドルに付与すべき目標操舵反力を操舵角及び車速に基づいて設定し、目標操舵反力を付与する反力制御を行う車両用操舵装置であって、車両のグリップ状態の程度を示すグリップ状態量に応じて目標操舵反力を補正する補正手段を備える。
(もっと読む)
車両用操舵装置
【課題】操舵に対して応答性よく転舵輪を転舵しつつも、操舵開始時や操舵停止時に大きな操舵反力の変化が発生することを抑制してドライバに与える違和感の低減を図る。
【解決手段】転舵制御部25は、第1の目標転舵角θ1と第2の目標転舵角θ2とを加算した最終目標転舵角θtに基づいて転舵モータ7を制御している。一方、反力制御部26は、第1の目標操舵反力T1と第2の目標操舵反力T2とを加算した最終目標操舵反力Ttに基づいて反力モータ3を制御している。この場合、第2の目標操舵反力T2を演算する第2の目標操舵反力演算部24は、操舵角速度θtに基づく第2の目標転舵角θ2の変化を抑制した値(第2の転舵角補正値)に基づいて第2の目標操舵反力T2を算出する。
(もっと読む)
車両の運動制御装置
【課題】車両の運動状態が変化して実車挙動観測装置による推定運動状態量の推定演算が中断したときの推定運動状態量の誤差を小さくできる車両の運動制御装置を提供することを課題とする。
【解決手段】実車挙動観測装置302が推定重心すべり角βactを推定する推定演算の代替値となる定常値を算出する定常値算出部302aを備える。そして、実車の運動状態が変化して、実車挙動観測装置302の推定重心すべり角βactの推定演算に不連続点が発生したとき、実車挙動観測装置302は、定常値算出部302aが算出する定常値を代替値とする推定演算によって、推定重心すべり角βactを推定する。
(もっと読む)
車両用制御装置
【課題】燃費の悪化や車輪の偏摩耗が生じることを防ぐと共に、車両の走行安定性を向上させることのできる車両用制御装置を提供すること。
【解決手段】車両用制御装置100は、スリップ角に対するセルフアライニングトルクを角度で微分した角度微分値が所定の第1閾値以下であるかを判断し、角度微分値が第1閾値以下であると判断される場合に車輪のキャンバ角を調整する第1キャンバ角調整手段を備えているので、横力が飽和してグリップ力の限界に近付くことを予測し、車輪のグリップ力が限界を超える前にキャンバスラストを発生させて、著しいアンダーステア傾向、オーバーステア傾向やスピンなどの発生を未然に防止することができる。これにより、車両の走行安定性を向上させることができると共に、長時間に亘ってキャンバ角が付与されることによる燃費の悪化や車輪の偏摩耗が生じることを防止できる。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
路面摩擦係数推定装置
【課題】いかなる車両の運動状態においても、重み付け等の複雑な処理を加えることなく、路面摩擦係数を連続的に自然な値で精度良く推定する。
【解決手段】実際に生じている推定ラック推力Fr_star、推定車輪制駆動力Fx_star、推定横力Fy_starを算出し、タイヤの縦ひずみと横ひずみを表現するパラメータλと路面摩擦係数μとをパラメータとして含むタイヤのブラッシュモデルにより基準ラック推力Fr_model、基準車輪制駆動力Fx_model、基準横力Fy_modelを算出し、推定ラック推力Fr_starと基準ラック推力Fr_modelとの偏差と推定車輪制駆動力Fx_starと基準車輪制駆動力Fx_modelとの偏差と推定横力Fy_starと基準横力Fy_modelとの偏差が最小となるように路面摩擦係数μの値を最適化計算により求める。
(もっと読む)
車両用路面反力推定装置
【課題】車両用路面反力推定装置において、駆動輪のセルフアライニングトルクを算出してから設定車両速度以上で路面反力を推定することで、路面反力を精度良く推定可能とし、また、車両が一定舵角の操舵時だけではなく、車両が動的に操舵している時でも路面反力を推定可能とする。
【解決手段】制御手段14は、車両速度検出手段15から検出される車両速度とハンドル切れ角検出手段16から検出されるハンドル切れ角とを用いてセルフアライニングトルクを算出する算出手段14Aと、車両速度検出手段15から検出された車両速度が予め設定された設定車両速度以上になった場合に算出手段14Aにより算出されたセルフアライニングトルクと予め設定された定数とに基づいて路面反力を推定する推定手段14Bとを備えている。
(もっと読む)
車両の舵角制御装置
【課題】良好な走行安定性を確保し得る車両の操舵制御装置を提供する。
【解決手段】車両の運転者のステアリング操作に応じて操舵対象車輪の車輪舵角を制御する車両の操舵制御装置において、車両のアンダーステア傾向の強さを示すアンダーステア状態量の増大に応じてステアリングギヤ比を大きくするためのアンダーステア状態量対応ステアリングギヤ比補正係数を設定し、当該設定されたアンダーステア状態量対応ステアリングギヤ比補正係数によって所定の標準ステアリングギヤ比を補正し、当該補正後のステアリングギヤ比とステアリング操作角とに基づいて操舵対象車輪の車輪舵角を演算し、操舵対象車輪の車輪舵角を検出し、上記演算された車輪舵角と上記検出された車輪舵角とが一致するように車輪舵角を制御する。
(もっと読む)
車両の駆動力制御装置
【課題】車両が低車速かつ大舵角旋回をおこなう場合に最大ヨーモーメントを発生させる駆動制御装置を提供すること。
【解決手段】車速が所定車速以下かつ操舵角が所定角以上で車両Veが旋回をおこなう場合に、キングピンオフセットを考慮して車両重心点P2の周りに発生させるヨーモーメントを算出し、その算出されたヨーモーメントが最大になるように車両Veの転舵角δL,δRが制御されるように構成されている。したがって、キングピンオフセットを考慮することにより、車両Veの旋回に適したヨーモーメントを算出することができるとともに、旋回動作中に車両Veに駆動力変化が生じず、車両Veの車両操作性を向上させることができる。
(もっと読む)
路面摩擦係数推定装置
【課題】車両が走行している路面の摩擦係数の推定値が実際の摩擦係数から乖離する方向に更新してしまうような状況が発生するのを防止し、該摩擦係数の推定を精度よく安定に行う。
【解決手段】比較対象外力の第1推定値Mnsp_estmを求める手段(S118−2)と、第2推定値Mnsp_sensを求める手段(S118−1)と、第1推定値Mnsp_estm及び第2推定値Mnsp_sensを基に摩擦係数推定値の増減操作量Δμ_kをそれぞれ決定する複数の増減操作量決定手段とを有し、Δμ_kに応じて摩擦係数推定値を更新する。増減操作量決定手段は第1推定値と第2推定値とのフィルタリング値の偏差に応じてΔμ_1,Δμ_2を決定し、増減操作量決定手段は第1推定値と第2推定値との偏差に応じてΔμ_1を決定する。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】マイクロプロセッサ10が、回避制御を実行するべきと判定した時点における自車両1の運転者の車両操作量に基づいて回避制御の動作範囲を設定し、設定された回避制御の動作範囲内で自車両1が障害物Oと接触することを回避する走行経路を回避経路として算出し、算出された回避経路に沿って走行するように運転者の車両操作を支援する。これにより、個々の運転者によって異なる回避操作の許容範囲を反映した回避制御を行うことができるので、運転者が回避制御に対して感じる違和感を低減することができる。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】スリップが発生する前に走行路面の路面μを推定する。
【解決手段】車両接地面摩擦状態推定装置は、車輪の制駆動力及び横力からなる合力並びに車輪のスリップ度を検出し(ステップS21、ステップS22)、車輪の制駆動力、横力及びスリップ度を座標軸とする3次元空間における、該制動力、横力及びスリップ度が零である原点と検出した現在の制駆動力、現在の横力及び現在のスリップ度が示す実測値との間の距離と、原点及び実測値を含む直線がタイヤ特性相関関係マップと交じわる交点と該原点との間の距離との比を基に、現在の路面の路面摩擦係数を算出する(ステップS23、ステップS24)。
(もっと読む)
1 - 20 / 95
[ Back to top ]