
Fターム[3D232DC11]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | フィルタ (501)
Fターム[3D232DC11]の下位に属するFターム
Fターム[3D232DC11]に分類される特許
1 - 20 / 142
電動機の制御装置
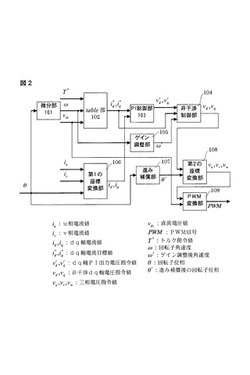
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
電動パワーステアリング装置

【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
電動パワーステアリング制御装置
【課題】制御系全体の安定化のために制御系に設ける補償機能を簡素な構成で実現できるようにすることを目的とする。
【解決手段】目標アシストトルク演算部20にて目標アシストトルク(目標電流)を演算し、モータ6の実電流Imをその目標電流に一致させるための電流指令である基本指令を電流制御部120が演算する構成において、目標アシストトルク演算部20に位相補償器を設けていた従来の構成に対し、目標アシストトルク演算部20には位相補償器を設けず、代わりに電流制御部120に対して電流安定化補償器31をアドオンする。電流安定化補償器31は、伝達関数がs(微分演算子)の4次以下の関数で表されるものであり、実電流Imに基づき、制御系全体を安定化させるための補償指令を生成する。そして、基本指令が補償指令によって補償されてなる電流指令が、駆動回路130に入力される。
(もっと読む)
逆入力荷重検出装置および逆入力荷重記録装置
【課題】車両の走行中に転舵機構に入力される逆入力荷重を検出することができる逆入力荷重検出装置を提供する。
【解決手段】ラックハウジング18に一体的に形成されたマウントブラケット20に、圧電素子35が内蔵されたマウントブッシュ32が装着されている。ECU40は、圧電素子35から発生した電荷に基づいて転舵機構5に入力された逆入力荷重を検出するための逆入力荷重検出回路43と、不揮発性メモリ45と、逆入力荷重検出回路43によって検出された逆入力荷重を不揮発性メモリ45に記憶するためのマイクロコンピュータ44とを備えている。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】ブラシ付きのモータに対する電流の目標値の大きさに関係なく該モータで発生する誘起電圧を算出できると共に、該誘起電圧の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に対する電流目標値Itを設定する電流目標値設定部30と、電圧センサ23からの検出信号に基づき電圧検出値Vdを検出する電圧検出部50と、バッテリ24の電源電圧Vpsに基づき電圧推定値Veを算出する電圧算出部51と、電流目標値Itが「0(零)」以外の値に設定される場合には電圧推定値Veに基づいた端子間電圧Vtを用いてモータ12で発生する誘起電圧Eを算出する一方、電流目標値Itが「0(零)」に設定される場合には電圧検出値Vdに基づいた端子間電圧Vtを用いて誘起電圧Eを算出する誘起電圧オブザーバ38と、を備えている。
(もっと読む)
モータ駆動装置、およびこれを用いた電動パワーステアリング装置
【課題】 製造時に電流制限値マップを作成するための工数を少なくし、かつ実使用時に電流制限値を変更可能なモータ駆動装置を提供する。
【解決手段】 スイッチング素子の電流制限値を変更する場合、素子温度Tが時刻t1での素子温度T1から第1目標温度T01まで変化するのに必要な温度到達時間P1、および電流制限値Eが時刻t1での電流制限値E1から第1目標電流制限値E01まで変化するのに必要な電流到達時間P2が算出される(S103)。次に、温度到達時間P1と電流到達時間P2との大小を判定する。(S104)温度到達時間P1が電流到達時間P2以下の場合、スイッチング素子の電流制限値を変更する。(S105)これにより、モータ駆動装置の製造時に電流制限値マップを作成することなく、時刻t1での素子温度T1に基づいて、スイッチング素子の状態に応じた電流制限値に変更することができる。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリング機構が操舵限界(端当て)に達したことを、電流指令値の変化率又は位相進み値に基づいて判定し、操舵補助力を供給する電動モータの駆動力を制限して端当て時の衝撃を低減した電動パワーステアリング装置を提供する。
【解決手段】操舵トルクTと車速Vに基づいて演算された電流指令値Iref はモータ制御部20に出力され、電動モータ30を駆動するパルス幅変調信号のデューテイ比Dが演算される。電流指令値変化率演算部25は電流指令値Iref の変化率を示す微分値を演算し、閾値メモリ26bの閾値と比較される。閾値を越えていない場合は演算されたデューテイ比DVNが選択され、閾値を越えている場合は制限デューテイ比DVLが選択され、インバータ24を介して電動モータ30が駆動される。フイルタにより位相のみを進ませた電流指令値と閾値と比較、上と同様にデューテイ比DVN/DVLを選択することもできる。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】モータと制御装置の各相特性を相殺して所望特性に変換すると共に、各相特性を一致させることによりトルクや速度等のリップル精度を向上させ、異音の発生がなく操舵に違和感のない電動パワーステアリング装置の制御装置を提供する。
【解決手段】ステアリングシャフトに発生する操舵トルク及び車速に基づいて操舵トルク補助指令値を算出し、操舵トルク補助指令値から各相電流指令値を算出し、各相電流指令値とモータの各相電流値とから算出した電流制御値に基づいてステアリング機構に操舵補助力を与えるモータを制御するようになっている電動パワーステアリング装置の制御装置において、モータと制御装置の各相特性を相殺する特性を有するフィルタを各経路に配設し、モータと制御装置の各相特性を一致させると共に、モータと制御装置の各相特性を所望特性とする。
(もっと読む)
トルクセンサ及びこれを備えた電動パワーステアリング装置
【課題】温度変化などによるドリフトの影響を完全に除去することができるトルクセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】回転軸に生じるトルクに応じて互いに逆方向にインピーダンスが変化する2対の検出コイル13a〜13dを軸方向に配列したトルク検出部10と、前記2対の検出コイルのうち軸方向の両端側の2つの検出コイル13a,13dとこれらに直列に接続した抵抗体とで構成される第1のブリッジ回路210Aと、前記2対の検出コイルのうち軸方向の中央側の2つの検出コイル13b,13cとこれらに直列に接続した抵抗体とで構成される第2のブリッジ回路210Bと、前記第1のブリッジ回路210A及び第2のブリッジ回路210Bに個別に交流信号を印加したときの差分信号に基づいて少なくとも2組の検出トルクを演算するトルク演算部21A,21Bとを備えている。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備え、前記モータ相対角度情報算出部は、前記操舵トルクに基づいてモータ相対角度変化量を算出し、算出したモータ相対角度変化量を前回サンプリング時のモータ相対角度に加算してモータ相対角度を算出する補完用相対角度情報演算部を有し、前記モータ角速度が零近傍の不感帯内にあるときに、前記補完用相対角度情報演算部で算出したモータ相対角度に基づいてモータ相対角度情報を演算する。
(もっと読む)
車両制御装置
【課題】個々のコントローラの冗長度を必要以上に上げることなく、システム全体でエラーをバックアップすることにより、簡潔なECUの構成で、低コストで、高い信頼性とリアルタイム性と拡張性とを確保した車両制御装置を提供する。
【解決手段】センサ信号を取り込むセンサコントローラと、センサコントローラが取り込んだセンサ信号に基づいて制御目標値を生成する指令コントローラと、指令コントローラから制御目標値を受けて車両を制御するためのアクチュエータを作動させるアクチュエータコントローラがネットワークで接続される車両制御装置であって、アクチュエータコントローラは、指令コントローラが生成する制御目標値に異常が生じたときには、当該アクチュエータコントローラが受信したネットワーク上のセンサコントローラのセンサ値に基づいて制御目標値に生成する制御目標値生成手段を有し、生成した制御目標値によってアクチュエータを制御する。
(もっと読む)
ヨーレート検出装置
【課題】車両の走行状態にかかわらずにヨーレートセンサの較正を適切に行なう。
【解決手段】ヨーレート検出装置10は、車両の位置が所定精度以上で車両のヨーレートを算出可能なヨーレート算出範囲内に存在するか否かを判定するヨーレート算出範囲判定部23aと、車両の現在位置がヨーレート算出範囲内に存在するとヨーレート算出範囲判定部23aにより判定された場合に、車両の位置と道路データ記憶部22に記憶されている曲率情報とに基づき、車両のヨーレートを算出して算出値を出力するヨーレート算出部31と、ヨーレート算出部31から出力されたヨーレートの算出値と、ヨーレートセンサ11から出力されるヨーレート(検出値)Ysとの差に基づき、ヨーレート(検出値)Ysを補正し、該補正により得られる算出値を出力するヨーレートセンサ補正部38とを備える。
(もっと読む)
車載用モータ制御装置
【課題】一般的な入力オフセットを有する増幅回路を用いて、入力オフセットを的確に補正し、且つ、機能安全の面において優れたモータ電流検出手段を備えたモータ制御装置を提供すること。
【解決手段】モータ制御装置は、増幅手段9の入力オフセットを補正する入力オフセット補正手段を少なくとも二つ以上備え、これら複数の入力オフセット補正手段の中から状況に応じたものを選択して、その選択したものを用いて入力オフセットを補正する。
(もっと読む)
操舵装置及び操舵制御装置
【課題】状態に応じて運転感覚を変えることができる操舵装置及び操舵制御装置を提供することを目的とする。
【解決手段】車両に設けられ回転操作可能である操舵部材2と、操舵部材2の回転方向の振動を調節可能である調節装置6と、車両の運転状態に応じて調節装置6を制御して操舵部材2の回転方向の振動を調節する制御を実行可能である操舵制御装置8と備えることを特徴とするので、状態に応じて運転感覚を変えることができる。調節装置6は、例えば、操舵部材2に伝達される振動の伝達度合いを調節可能であり、操舵制御装置8は、例えば、操舵部材2に伝達される振動の伝達度合いを調節することで操舵部材2の回転方向の振動を調節することができる。
(もっと読む)
パワーステアリング装置
【課題】作動油の粘性変化により配管等に生ずる圧力損失に基づいた操舵アシスト力の変化を十分に抑制し得るパワーステアリング装置を提供する。
【解決手段】 操舵角センサ73によって検出される操舵角θに基づいて推定された操舵角速度ω及びタンク内油温推定部90において演算(推定)されたタンク内油温Tfに基づき、操舵角速度ωが高いほど及びタンク内油温Tfが低いほど電動モータ50を駆動制御するためのアシスト電流Ioが増大するように補正制御を行うこととした。
(もっと読む)
電動パワーステアリング装置
【課題】寄生ダイオードを有する電界効果トランジスタを電源開閉器として適用した場合に、電界効果トランジスタの異常を検出することができる電動パワーステアリング装置を提供する。
【解決手段】車両のステアリング機構に対する操舵補助力を発生する電動モータを駆動するモータ駆動回路13は、前記電動モータを駆動するブリッジ回路22と、該ブリッジ回路に直流電力を供給する直流電源からの直流電力が入力される電源端子tp,tnと、該電源端子と前記ブリッジ回路との間を接続する一対の電源ラインの何れか一方に、内部の寄生ダイオードが前記直流電源に対して順方向となるように介挿された電界効果トランジスタFET1と、該電界効果トランジスタをオン状態及びオフ状態に駆動したときの当該電界効果トランジスタの入力側及び出力側の両端の差動電圧を検出して当該電界効果トランジスタの異常を検出する異常検出手段とを備えている。
(もっと読む)
後退駐車支援制御装置および後退駐車支援制御装置用のプログラム
【課題】車載カメラによって撮影された車両後方画像から駐車枠線を検出する技術において、ドライバの運転負担を軽減すると共に、車両の後退開始位置までの車両の変位量を検出する必要性を低減する。
【解決手段】後退駐車支援制御装置が、撮影画像から、駐車枠探索範囲のウインドウ31、32を抽出し、抽出されたウインドウの範囲内で、駐車枠線を検出するようになっており、ウインドウ31、32の抽出時は、車両1の現在のステアリング角で基準距離Lだけ後退したと仮定した場合の車両1’の後端部の近傍に限定して、ウインドウ31、32を抽出する。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサ異常時の代替的なアシスト制御時においても過剰アシストの発生を抑えて安定的にアシスト力付与を継続することのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコン(セルフステア抑制制御部)は、過剰アシスト力により転舵がステアリング操作に先行する所謂セルフステアの有無を判定し、当該セルフステアが発生している場合には、抑制ゲインKslfとして「0」を演算することにより、その操舵系に付与するアシスト力を停止する。また、マイコンは、上記セルフステア判定及び抑制ゲインKslfの演算に先立って、ステアリング操作の状態(操舵状態)が「切り戻し」状態であるか否かを判定する。そして、切り戻し状態であると判定した場合(ステップ102:NO又はステップ103:NO)には、セルフステアの如何に関わらず、そのアシスト力付与を停止すべく抑制ゲインKslfを演算する(Kslf=0、ステップ104)。
(もっと読む)
1 - 20 / 142
[ Back to top ]