
Fターム[3D232DC17]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 位相補償 (262)
Fターム[3D232DC17]の下位に属するFターム
遅延要素 (40)
Fターム[3D232DC17]に分類される特許
1 - 20 / 222
電動パワーステアリング装置
【課題】加速度センサをタイロッドに比べて動きの小さいラックハウジングに取り付けることができるとともに、加速度センサの出力信号からタイロッドの加速度を推定することができるようになる電動パワーステアリング装置を提供する。
【解決手段】ラックハウジングに加速度センサ30が取り付けられている。加速度センサ30はラックハウジング加速度を検出する。位相進み補償処理部52Aは、タイロッド加速度に対するラックハウジング加速度の位相遅れ分だけ、ラックハウジング加速度の位相を進めるための位相進み補償処理を行なう。ゲイン補正処理部52Bは、タイロッド加速度に対するラックハウジング加速度のゲイン減少分だけ、ラックハウジング加速度のゲインを増加させるためのゲイン補正処理を行なう。
(もっと読む)
電動パワーステアリング制御装置

【課題】車両のヨー応答を低下させることなくロール振動を抑制する
【解決手段】EPSシステム1では、アシスト補償量演算部22が、車両の運転者によるハンドルの操作が反映された操舵トルクと、車両の挙動が反映された推定路面反力とに基づき、次の(a)および(b)の2つのゲイン特性を満たすようにアシスト補償量を演算する。(a)操舵トルクに対する補正アシスト量のゲイン特性については、操舵トルクの周波数が予め設定された第1設定周波数を超えると、周波数が高くなるにつれて補正アシスト量のゲインが徐々に減少する1次フィルタの形状を有する。(b)推定路面反力に対する補正アシスト量のゲイン特性については、推定路面反力の周波数が、第1設定周波数より高くなるように予め設定された第2設定周波数になるまでは、周波数が高くなるにつれて補正アシスト量のゲインが徐々に増加する、推定路面反力の微分特性を有する。
(もっと読む)
パワーステアリング装置
【課題】路面からの逆入力により発生する操舵機構の振動をより精度良く検出することができるパワーステアリング装置を提供する。
【解決手段】入力軸(第3コラムシャフト)に設けられ、入力軸に生じる歪振動を検出する第1歪センサと、出力軸(ピニオンシャフト)に設けられ、出力軸に生じる歪振動を検出する第2歪センサと、第2歪センサの出力信号である第2歪振動V2の位相が第1歪センサの出力信号である第1歪振動V1よりも進んでいるか否かを判断する位相判断回路84と、位相判断回路84が、第2歪振動V2の位相が第1歪振動V1の位相よりも進んでいると判断するとき、路面から操舵機構に対して作用する逆入力トルクが作用していると判断し、逆入力トルクが低減する方向に電動モータ60の駆動電流を補正する駆動電流補正回路(強化ゲイン設定回路824)と、を有する。
(もっと読む)
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
電動パワーステアリング装置および車両用制御装置
【課題】急発進する必要がある場合により早く発進できる状態とすることができる技術を提供する。
【解決手段】操舵トルクを検出するトルクセンサと、電動モータ110と、ステアリングホイールの操作角度を検出する操舵角センサと、車両に設けられ予め定められた停止条件が成立した場合にエンジンを自動的に停止させるとともにエンジンが停止している状態で予め定められた始動条件が成立した場合にエンジンを自動的に再始動させるエンジン制御装置6に対して、予め定められた停止条件が成立した場合であってもエンジンの停止を禁止する旨を要求し、および/または予め定められた始動条件が成立していなくてもエンジンの再始動を要求するモータ制御部40と、を備え、モータ制御部40は、操舵トルクが基準トルクを超えている場合、あるいは操作角度が基準角度を超えている場合には、エンジンの停止を禁止する旨を要求、またはエンジンの再始動を要求する。
(もっと読む)
車両用操舵装置
【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
ステアリング制御装置
【課題】車両の走行安定性を向上させることが可能なステアリング制御装置の提供。
【解決手段】位相検出部18は、操舵輪側で発生する実舵角θbがステアリングホイール側で発生する操舵角θaに対して一方の回転方向へ先行して変化する進み位相状態であるか否かを判定し、実舵角θbが進み位相状態である場合、モータベクトル制御部17は、上記一方の回転方向に対して反対方向へ向かう制動トルクを発生させる指令信号をモータ3へ出力する。
(もっと読む)
電動パワーステアリング装置
【課題】簡易な構成でタイヤのグリップの喪失を検出でき、グリップロス度を位相補償し、補正操舵トルク又は補正係数を演算して電流指令値を高速に補正し、車両挙動の一層の安定化が可能な電動パワーステアリング装置を提供する。
【解決手段】モータの角速度に基づいて収れん性制御信号を出力する収れん性制御部と、車両のラック軸上に生じる外力をSAT検出値として検出するSAT検出部と、路面から生じるSATを車両モデルに基づいてSAT推定値として推定するSAT推定部と、SAT検出値及びSAT推定値に基づいてタイヤのグリップが失われた度合いを表すグリップロス度を検出するグリップロス度検出部と、グリップロス度を位相補償する位相補償部と、位相補償されたグリップロス度に基づいて補正操舵トルクを演算する補正値演算部とを具備し、補正操舵トルクと収れん性制御信号とで電流指令値を補正する。
(もっと読む)
電動パワーステアリング装置
【課題】製造工数を低減することができる技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、ステアリングホイールに連結される第1の回転軸と、第1の回転軸とトーションバーを介して連結される第2の回転軸と、第1の回転軸と第2の回転軸との相対回転角度を検出する磁気センサと、ステアリングホイールに操舵トルクが付与されていないときの磁気センサの出力値である基準値を記憶する記憶部とを有し、記憶部に記憶された基準値と磁気センサの出力値とに基づいて操舵トルクを検出するトルク検出装置と、外部装置と通信を行うために外部装置のコネクタと接続される接続コネクタ16を有するとともに、トルク検出装置が検出した操舵トルクに基づいて電動モータの駆動を制御する制御ユニット10と、を備え、トルク検出装置の記憶部に基準値を記憶させる処理を、制御ユニット10の接続コネクタ16を介して行うことを可能にする。
(もっと読む)
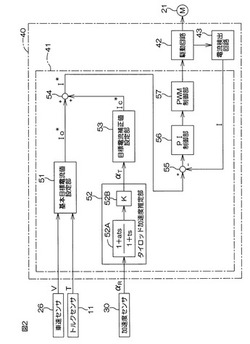
電動パワーステアリング装置
【課題】ステアリング機構が操舵限界(端当て)に達したことを、電流指令値の変化率又は位相進み値に基づいて判定し、操舵補助力を供給する電動モータの駆動力を制限して端当て時の衝撃を低減した電動パワーステアリング装置を提供する。
【解決手段】操舵トルクTと車速Vに基づいて演算された電流指令値Iref はモータ制御部20に出力され、電動モータ30を駆動するパルス幅変調信号のデューテイ比Dが演算される。電流指令値変化率演算部25は電流指令値Iref の変化率を示す微分値を演算し、閾値メモリ26bの閾値と比較される。閾値を越えていない場合は演算されたデューテイ比DVNが選択され、閾値を越えている場合は制限デューテイ比DVLが選択され、インバータ24を介して電動モータ30が駆動される。フイルタにより位相のみを進ませた電流指令値と閾値と比較、上と同様にデューテイ比DVN/DVLを選択することもできる。
(もっと読む)
車両の操舵装置および操舵方法
【課題】前後どちらの転舵系が故障しても、操舵応答に大きく寄与する前輪の転舵を補償することにより、操舵応答が大きく悪化するのを回避し得るようになす。
【解決手段】A側車輪3の操舵アクチュエータ27を含む転舵機構と、B側車輪4の操舵アクチュエータ28を含む転舵機構との間を、所要に応じ機械的に結合可能なクラッチ41を設ける。A側車輪転舵系およびB側車輪転舵系が共に正常である場合、コントローラ12はクラッチ41を解放すると共に、操舵角θおよび車体速Vを基に演算した目標挙動が達成されるよう、A側操舵アクチュエータ27およびB側操舵アクチュエータ28を個々に動作させ、右輪3,4を個別に転舵する。A側車輪転舵系またはB側車輪転舵系が故障した場合、コントローラ12はクラッチ41を締結する。この締結により、故障していない正常な転舵系の側操舵アクチュエータ27または28を用いて、故障している側の車輪を引き続き転舵することができ、前輪の転舵を補償して操舵応答の大きな悪化を回避することができる。
(もっと読む)
電動パワーステアリング装置
【課題】操舵補助のために電動モータを駆動しつつオフセット補正値を補正することができる技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、電動モータに供給する目標電流を算出する目標電流算出部と、電動モータへ実際に供給される実電流に応じた値を出力するモータ電流検出部と、モータ電流検出部からの出力値のオフセットを予め記憶されたオフセット補正値を用いて補正し実電流を算出する補正電流算出部343と、目標電流算出部が算出した目標電流と補正電流算出部343が算出した実電流とに基づいて電動モータに印加する目標電圧を算出するPI制御部、2軸3相変換部およびV相目標電圧算出部と、算出した目標電圧を電動モータに印加して電動モータを駆動するモータ駆動部と、2軸3相変換部が算出した目標電圧に基づいてオフセット補正値を補正する補正値補正部341とを備える。
(もっと読む)
電動パワーステアリング装置および電流検出装置
【課題】オフセット補正値をより簡便に最適な値に更新することが可能な技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータ110と、電動モータ110へ実際に供給される実電流に応じた値を出力するモータ電流検出部33と、モータ電流検出部33からの出力値のオフセットを補正するオフセット補正値と温度との相関関係を記憶する相関関係記憶部と、相関関係記憶部に記憶された相関関係に基づいて算出したオフセット補正値を用いて、モータ電流検出部33からの出力値のオフセットを補正し実電流を算出するオフセット補正部34と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】正確に車両の横流れを検出して電流指令値を補正し、より安全で快適な直進走行が可能な電動パワーステアリング装置を提供する。
【解決手段】ステアリング機構に付加する作用力を検出する作用力検出手段と、ステアリング機構の回転角度を検出する回転角度検出手段と、作用力、回転角度及び車速に基づいて車両の走行状態を判定すると共に、走行状態の判定結果及び作用力に基づいてモータ電流補正値1を算出し、車両の電動パワーステアリングシステムがONからOFFにされたときに、モータ電流補正値1を不揮発メモリに記憶し、車両の電動パワーステアリングシステムがOFFからONにされたときに、不揮発メモリに記憶されたモータ電流補正値1を初期値として今回のモータ電流補正値2を算出し、モータ電流補正値1又は2によって電流指令値を補正するモータ電流補正値算出手段とを具備する。
(もっと読む)
電動パワーステアリング装置
【課題】いかなる走行状態においても正確に車両の横流れを検出して電流指令値を補正し、より安全で快適な直進走行が可能な電動パワーステアリング装置を提供する。
【解決手段】ステアリング機構に付加する作用力を検出する作用力検出手段と、ステアリング機構の回転角度を検出する回転角度検出手段と、作用力、回転角度及び車速に基づいて車両の走行状態を判定すると共に、走行状態の判定結果と作用力に基づいてモータ電流補正値を算出し、モータ電流補正値によって電流指令値を補正するモータ電流補正値算出部とを設ける。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置を制御する装置が有する記憶装置の不具合を診断する際の処理負荷を低減すること。
【解決手段】CPU101、ROM102、RAM103は、電動パワーステアリング装置の制御に用いられる。ROM102やRAM103は、電動パワーステアリング装置の制御に使用される情報を格納するとともに、複数のエリアに分割されている。複数のエリアは、電動パワーステアリング装置の制御における所定の処理単位毎に対応している。CPU101は、複数のエリアのうち、制御の処理負荷に基づいて診断対象のエリアを選択し、選択したエリアを診断する。
(もっと読む)
電動パワーステアリング制御装置
【課題】A/D変換回路数を増やさず、コストアップを招く事なく優れた振動抑制性能を実現する。
【解決手段】操舵トルク信号とモータを駆動する電流信号からオブザーバによりモータ回転速度の振動周波数成分を推定しフィードバックすることにより発振を抑制する電動パワーステアリング制御装置において、トルクHPF8の後段にトルク位相進み低減器16を配置し、電流HPF9の後段に電流位相進み低減器17を配置し、トルク位相進み低減器16は、ハンドル振動周波数fvibとトルクHPFのカットオフ周波数fT_HPFの比と、トルク位相進み低減器のカットオフ周波数fT_compとハンドル振動周波数fvibの比とが同一となるローパスフィルタ特性を有し、電流位相進み低減器17は、トルク位相進み低減器16と同一の周波数特性を有するように構成した。
(もっと読む)
パワーステアリング装置
【課題】大舵角時における保舵力および操舵トルクの増大を抑制しつつ、転舵後の切り戻し時における操舵角の戻り性を改善したパワーステアリング装置を提供する。
【解決手段】操舵アシスト用の電動モータ1を駆動制御するコントロールユニット10が、操舵角に基づいて算出したステアリング戻し制御トルクを基本目標アシストトルクに加算して目標アシストトルクを算出するステアリング戻し制御部24を備えている。ステアリング戻し制御部24は、操舵角が予め定めた戻し制御設定角度よりも小さいときに、上記ステアリング戻し制御トルクを反操舵角方向に設定する一方、上記操舵角が上記戻し制御設定角度以上のときに、上記ステアリング戻し制御トルクを零または操舵角方向に設定する。
(もっと読む)
電動パワーステアリング制御装置
【課題】振動抽出フィルタや制御ゲインを、外乱振動抑制効果を最適にするように可変化し、モータの発生するトルクリップルやコギングトルクなどの外乱振動成分を十分に低減することが可能である。
【解決手段】操舵トルクを示す検出操舵トルク信号Tspに基づいて目標電流Itを演算するアシストマップ20と、目標電流Itに基づいてモータ5に流れる電流を制御する電流制御手段3と、操舵トルク信号Tsrをフィルタ処理することで振動成分信号を出力する振動抽出フィルタ8と、振動成分信号に基づいて外乱補償指令Trcを演算するBPFゲイン9と、モータ5の回転速度に基づいて振動抽出フィルタ8のフィルタ周波数を補正するBPF周波数マップ15とを備え、操舵トルク信号Tsrに外乱補償指令Trcを加算した信号を新たに操舵トルク信号としてアシストマップ20が処理を行なう。
(もっと読む)
モータ制御装置及びそれを用いた電動パワーステアリング装置
【課題】単一の電流検出器を用いてモータ相電流を検出し、ソフトウェア負荷を高めることなく、最大Dutyが100%となったときにも電流検出時間を確保するためのDuty変更を行うことができ、電流検出が可能なDuty範囲を狭くすることがなく、コンパクト化、軽量化、コストダウンを図ったモータ制御装置及びそれを用いた電動パワーステアリング装置を提供する。
【解決手段】電流検出周期では、最大Duty又は中間Dutyを基準Dutyとして、1相ON時間及び2相ON時間が電流検出に必要な時間となるように各相Duty指令値を変更して検出用各相Duty指令値とし、Duty調整周期では、n回平均DutyがDuty指令値と一致するように、電流検出周期に変更した各相Dutyの増減分を1/(n−1)した値を各相Duty指令値に加算して調整用各相Duty指令値とする。
(もっと読む)
1 - 20 / 222
[ Back to top ]