
Fターム[3D232DC28]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 正負(正逆)判定手段 (48)
Fターム[3D232DC28]に分類される特許
1 - 20 / 48
車線維持支援装置
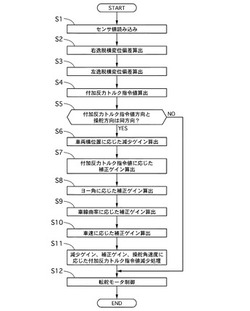
【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
車両のパワーステアリング制御装置

【課題】パワーステアリングによりダンピング補正を精度良く適切に行って、スッキリとした操舵フィーリングを維持し、たとえ、比較的素早い切り返し操舵時等であってもドライバがしっかりステアリングホイールを握らなくても安定感のある操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ヨーレートγとハンドル角速度(dθH/dt)とが同符号の場合は、アシスト補正量ΔTaを0とし、ヨーレートγとハンドル角速度(dθH/dt)とが異符号の場合は、ヨーレートの絶対値|γ|に基づいてダンピング補正量Gdを算出してこのダンピング補正量Gdとハンドル角速度(dθH/dt)とに基づいてアシスト補正量ΔTaを算出し、アシスト補正量ΔTaで基本アシストトルクTbを補正してアシストトルクTaとする。
(もっと読む)
車両用操舵装置
【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
車両用操舵装置
【課題】切り戻し操舵時に違和感を生じさせることなく、ステアリング中立近傍において切り込み操舵時の応答性を向上させることのできる車両用操舵装置を提供すること。
【解決手段】ギヤ比可変制御演算部23は、ステアリング中立近傍の小舵角領域において、そのステアリングギヤ比が、よりクイックな値となるように、操舵角θsに応じたギヤ比可変指令角θvg*を演算する。また、ギヤ比可変制御演算部23は、運転者によるステアリング操作の状態(操舵状態)が「切り込み」又は「切り戻し」の何れであるかを判定する操舵状態判定部34を備える。そして、ギヤ比可変制御演算部23は、その操舵状態が「切り戻し」である場合には、直前のステアリングギヤ比が維持されるように、そのギヤ比可変指令角θvg*を演算する。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
電動パワーステアリング装置
【課題】モータに負荷トルクが印加された状態でモータ電流が極小化する状況を回避して、モータ制御の安定性を好適に維持することのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルク(τ)との間のトルク偏差Δτに基づいてγ軸電流増減値ηを演算するγ軸電流増減値演算部71と、当該γ軸電流増減値ηを積算する積算制御部72とを備える。そして、電流指令値演算部61は、そのγ軸電流増減値ηの積算値をγ軸電流指令値Iγ*とする。また、電流指令値演算部61は、γ軸電流増減値ηを補正する増減値調整演算部73を備えるとともに、同増減値調整演算部73は、車両が直進状態にあるか否かを判定する。そして、増減値調整演算部73は、車両が非直進状態にあると判定した場合には、γ軸電流増減値ηを「0」に補正して積算制御部72に出力する。
(もっと読む)
サーボ制御装置
【課題】サーボ制御における積分項を外乱の状況に応じて適正に設定し、オーバーシュートを低減しつつ外乱の影響を補償する。
【解決手段】曲率制御部42から出力される旋回のフィードフォワード制御の操舵トルクと、横位置制御部43から出力される車両の横位置制御の操舵トルクと、姿勢制御部44から出力される車両の鉛直軸回りの姿勢制御の操舵トルクと、積分制御部45から出力される横位置制御の偏差を補償する操舵トルクとを合算した目標操舵トルクを操舵系に与えて操舵支援を行う。その際、外乱変化に対する適切なタイミングで積分値をリセットし、また、外乱の大きさに応じた適切な積分量、積分範囲の制限等を行うことで、オーバーシュートを低減しつつ外乱の影響を補償する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置およびそれを備えた車両用操舵装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。検出操舵トルクTがフィードバックされ、検出操舵トルクTを指示操舵トルクT*に近づけるように、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。補正制御部38は、推定誘起電圧の二乗和Σに基づき、加算角ガード41による加算角補正の実施/非実施を決定し、加算角リミッタ24における制限値を変更する。
(もっと読む)
操舵装置
【課題】操舵指示部の戻し操舵をしなくても、操舵体が直進状態に戻るようにする。
【解決手段】操舵装置1は、ハンドル2の角加速度を検出し、角加速度が正の場合には、ハンドル2の操舵方向に一致するように操舵輪5の操舵方向を操舵し、角加速度が正から負に変化することを検出し、前記角加速度が負の場合には、ハンドル2の操舵方向とは逆方向に、操舵輪5の操舵方向を操舵し、操舵輪5を直進位置に向かって戻す制御信号を生成する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵角に基づくパワーアシスト制御の実行時においても適切且つ安定的にアシスト力を付与することのできる電動パワーステアリング装置を提供すること。
【解決手段】セルフステア抑制制御部32は、ダンピング制御量演算部37を備え、同ダンピング制御量演算部37は、モータ12の回転角速度ωmに基づいて、その代替アシスト制御の基礎成分として操舵角θsに基づき演算される代替アシスト制御量Isb*を打ち消す方向(逆符号)のダンピング制御量Idp*を演算する。そして、セルフステア抑制制御部32は、そのダンピング制御量Idp*を基礎とするセルフステア抑制制御量Islf*を演算し、代替アシスト制御量Isb*に重畳することにより、その操舵系に付与されるアシスト力を回転角速度ωmに応じて低減する。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサ異常時の代替的なアシスト制御時においても過剰アシストの発生を抑えて安定的にアシスト力付与を継続することのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコン(セルフステア抑制制御部)は、過剰アシスト力により転舵がステアリング操作に先行する所謂セルフステアの有無を判定し、当該セルフステアが発生している場合には、抑制ゲインKslfとして「0」を演算することにより、その操舵系に付与するアシスト力を停止する。また、マイコンは、上記セルフステア判定及び抑制ゲインKslfの演算に先立って、ステアリング操作の状態(操舵状態)が「切り戻し」状態であるか否かを判定する。そして、切り戻し状態であると判定した場合(ステップ102:NO又はステップ103:NO)には、セルフステアの如何に関わらず、そのアシスト力付与を停止すべく抑制ゲインKslfを演算する(Kslf=0、ステップ104)。
(もっと読む)
パワーステアリング装置
【課題】出力値が発散、又はアンダーフロー若しくはオーバーフローすることなくシミー変動を抑制し得るパワーステアリング装置を提供する。
【解決手段】 電子コントロールユニットに、シミー変動を抑制する振動抑制信号Tvを演算する振動抑制信号演算部22を有し、シミー変動成分Smの発生時における位相とパワーシリンダにおいて振動抑制信号Tvに基づく操舵力が発生した時の位相との差が90度より大きく270度より小さい特性を有するパワーステアリング装置であって、振動抑制信号演算部22を、トルクセンサにより検出された操舵トルク信号Tからシミー変動成分Smを抽出するバンドパスフィルタ31と、この抽出されたシミー変動成分Smの位相を反転させることで前記位相差を補正する位相補正手段32と、により構成することにより、シミー変動成分Smを容易かつ良好に減少させることができる。
(もっと読む)
電動パワーステアリング装置
【課題】速い操舵での手ごたえや安定感を得られる電動パワーステアリング装置を提供する。
【解決手段】前記ステアリング装置の操作時における操舵角と前記操舵トルクとから得られるヒステリシス曲線が囲む部分の広さを減衰係数A3とし、前記ヒステリシス曲線の対角線を結ぶ線の傾きを動ばね定数A2とし、前記減衰係数A3を前記動ばね定数A2で除算した値を操舵特性に関する評価指標A3/A2としたときの、前記減衰係数A3を、操舵周波数を加味して算出する減衰係数算出部230と、操舵方向が往きであるか戻りであるかを判定する操舵方向判定部235とを備え、前記操舵方向の判定結果が往きであるか戻りであるかによって、前記減衰係数A3による前記ベース信号A1の補正を制御することで、前記操舵周波数にかかわらず前記評価指標が略一定になるようにした。
(もっと読む)
電動パワーステアリング制御装置
【課題】スイッチング素子のオン故障時においても、継続して安定したステアリング操作を行なうことができる電動パワーステアリング制御装置を提供すること。
【解決手段】正回路または逆回路が制御状態であって、その回路に含まれる2個のスイッチング素子のうち、1個のスイッチング素子がオン故障と判断された場合には、
直流モータの回転指令方向が同一方向である期間は、オン故障したスイッチング素子をオン制御し、もう一方のスイッチング素子はPWM制御を行い、残りの回路に含まれる2個のスイッチング素子はオフ制御とする制御処理を選択し実行する。
(もっと読む)
電動パワーステアリング装置
【課題】構造を複雑にすることなくラトル音の発生を抑制することができる電動パワーステアリング装置を提供する。
【解決手段】不感帯域マップが基本アシスト特性から右アシスト方向にオフセットしたアシスト特性、及び、左アシスト方向にオフセットしたアシスト特性を併有するECUにより、モータに微小な回転トルクを生じさせ、駆動ギヤ及び従動ギヤ間でバックラッシュがない状態とする。この状態では、路面から逆入力があっても、両ギヤは互いに当接した状態を維持することができるので、ラトル音の発生を抑制することができる。また、ECUは、左右いずれか一方の操舵トルクの絶対値が増大して所定値(T0,T3の絶対値)より大きくなった後、当該所定値より小さい状態に戻るときは、アシスト方向が反転する方のアシスト特性を選択することにより、違和感の無い滑らかな操舵感を実現する。
(もっと読む)
車両制御装置
【課題】四輪操舵装置を備える車両を、操舵時に進行方向に対して好適に平行移動させる。
【解決手段】車両10は、前輪を操舵可能な前輪側操舵機構250,260と、操舵される前輪の舵角に対し、走行状態に応じて異なる舵角をとるように後輪を操舵可能な後輪側操舵機構270,280とを有する。この車両を制御する車両制御装置100は、予め設定された車両のヨー角を特定するための第1関数から、ヨー角を零とした場合における前輪の舵角と後輪の舵角との関係を表す第2関数に含まれる時定数τ1,τ2の値を、決定する時定数決定手段と、決定された値を時定数に代入した第2関数を用い、ヨー角を零とした場合における、操舵される前輪の舵角σfに対し後輪がとるべき舵角たる後輪目標舵角σrを決定する目標舵角決定手段とを備える。
(もっと読む)
車両用操舵装置
【課題】車両がオーバステア状態に入った際に、運転者が素早く滑らかにカウンタステアを当てることができる車両用操舵装置を提供する。
【解決手段】EPS_ECU200は、基本制御部51、操舵反力制御部52、減算器53、及び駆動電流制御部54を有している。操舵反力制御部52は、ヨーレート反力補正電流演算部65、舵角反力補正電流演算部66、舵角反力制御制限部67、加算器68を有している。ヨーレート反力補正電流演算部65は、ヨーレート反力補正電流Iyを算出し、舵角反力補正電流演算部66は、舵角反力補正電流Isを算出する。舵角反力制御制限部67は、車両のオーバステア状態を検出した後、運転者の操作がカウンタステア状態の間、ヨーレートγの方向と舵角δの方向が一致しているときは、舵角反力制御をオンとし、ヨーレートγの方向と舵角δの方向が一致していないときには、舵角反力制御をオフとする。
(もっと読む)
舵角反力制御装置
【課題】イグニションスイッチのオンの直後から、舵角反力制御を適切に行える舵角反力制御装置を提供する。
【解決手段】舵角中点を学習した後に、舵角に応じて舵角中点の方向へアシスト力に対する反力を転舵輪10に付与する舵角反力制御装置5であって、学習する前においては、操舵方向と操舵トルクの方向とが異なっている場合にのみ、舵角に応じない反力を転舵輪に付与する。これにより、中点ズレが切り側よりも影響が少ない戻り側でのみ制御することで、学習前の戻りの商品性を確保することが出来る。
(もっと読む)
操舵負荷推定装置及び電動パワーステアリング装置
【課題】操舵負荷からヒステリシス特性を精度良く除去すること。
【解決手段】操舵輪を直進状態から転舵させようとする操舵トルクに基づいて推定される操舵負荷Txには、主にギヤロスに起因してヒステリシス特性が含まれる。このギヤロスの大きさは、操舵トルクの大きさに依存して変化し、操舵トルクが大きくなるほど、ギヤロスの大きさも大きくなる。そこで、推定操舵負荷Txに所定比率の係数を乗じることによって、補正値を求める。従って、補正値は、推定操舵負荷Txが大きくなるほど大きくなり、逆に推定操舵負荷Txが小さくなるほど小さくなる。このように算出された補正値を用いて、操舵負荷を補正することにより、推定操舵負荷Txのヒステリシス特性を精度良く除去して、より路面反力に近似する補正操舵負荷Tx’を求めることができる。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】『往き』/『戻り』の操舵切替わり時に電動機の駆動電流指令値が変化しないようにして、操舵トルクの変動がなく良好な操舵フィーリングが得られるようにする。
【解決手段】操舵状態判定手段52が判定したハンドルの『往き』/『戻り』状態に応じて、目標電流算出手段53は、ベース信号演算手段51のベース信号に対して補正値を加算して目標電流を求める。目標電流保持手段55には『往き』/『戻り』状態が切り替わる直前の目標電流が保持されている。目標電流制限手段54は、『往き』から『戻り』に切り替わったときには、『戻り』時の目標電流が直前の『往き』の実電流を超えない値の目標電流を目標電流保持手段55から取得し、『戻り』から『往き』に切り替わったときには、『往き』時の目標電流が直前の『戻り』の実電流を下回らない値の目標電流を目標電流保持手段55から取得する。これによって状態切替り時に補助トルクの変動はない。
(もっと読む)
1 - 20 / 48
[ Back to top ]