
Fターム[3D232EC24]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御機構) (6,276) | 電動機式制御装置 (3,850) | 電動機 (3,326) | 供給電圧調整 (279)
Fターム[3D232EC24]に分類される特許
1 - 20 / 279
車両操舵制御システム
【課題】電力不足の状態が発生した場合に、システム重要度に応じた動作制御を行うことのできる技術を提供する。
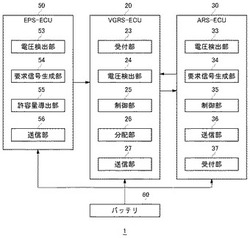
【解決手段】EPS−ECU50は、VGRS−ECU20に対して、要求信号を送信する。VGRS−ECU20は、要求信号を受信すると、VGRSアクチュエータの制御を決定するとともに、ARSアクチュエータの制御も決定する。要求信号がアクチュエータの動作停止を要求する場合、VGRS−ECU20は、VGRSアクチュエータおよびARSアクチュエータを、それぞれ動作停止するように制御する。
(もっと読む)
電動パワーステアリング制御装置

【課題】運転者の意思を適切に反映したアシスト制御を可能にする
【解決手段】EPSシステム1では、目標アシストトルク演算部20が、トルクセンサにて検出された操舵トルクTsに基づき、操舵トルクに応じた値の目標アシストトルクを示す目標電流を演算し、モータ駆動回路50が、演算された目標電流に基づいてモータ6を駆動させる。また、操舵角センサが操舵角θsを検出するとともに、微分器62が操舵角速度ωsを演算し、さらに操舵状態量演算部22が、操舵角θsと操舵角速度ωsとに基づいて、操舵状態量を演算する。そして目標アシストトルク演算部20は、演算された操舵状態量に基づき、目標アシストトルクを示す目標電流を変更する。したがって、操舵トルクTsだけではなく操舵角速度ωsによっても目標アシストトルクを変更することができる。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
電動パワーステアリング装置
【課題】弱め界磁電流指令値の急変による異音や振動の発生が許容範囲となる立ち上がり、立下りが的確に設定できる電動パワーステアリング装置を提供する。
【解決手段】時点t1での基準値0から弱め界磁電流指令値Id*に到達するまでの立ち上がり区間での時間微分値を、時点t2での弱め界磁電流指令値Id*から基準値0に到達するまでの立ち下がり区間での時間微分値に比較して大きな値に設定することで、時点t1における立ち上がり区間では、トルク変動を低減して異音や振動の発生を抑制しながら高速時に急に操舵された場合等における弱め界磁制御の効果の発生が間に合うようになり、時点t2における立ち下がり区間では、時間微分値を小さな値に設定しているので、より一層トルク変動を低減して異音や振動の発生をより抑制することができる。
(もっと読む)
電動パワーステアリング制御装置
【課題】制御系全体の安定化のために制御系に設ける補償機能を簡素な構成で実現できるようにすることを目的とする。
【解決手段】目標アシストトルク演算部20にて目標アシストトルク(目標電流)を演算し、モータ6の実電流Imをその目標電流に一致させるための電流指令である基本指令を電流制御部120が演算する構成において、目標アシストトルク演算部20に位相補償器を設けていた従来の構成に対し、目標アシストトルク演算部20には位相補償器を設けず、代わりに電流制御部120に対して電流安定化補償器31をアドオンする。電流安定化補償器31は、伝達関数がs(微分演算子)の4次以下の関数で表されるものであり、実電流Imに基づき、制御系全体を安定化させるための補償指令を生成する。そして、基本指令が補償指令によって補償されてなる電流指令が、駆動回路130に入力される。
(もっと読む)
電動パワーステアリング制御装置
【課題】路面負荷に応じた操舵反力の特性の実現と、車両全体としての適切な操作安定性の実現とを両立させることが可能な電動パワーステアリング制御装置を提供する。
【解決手段】ベースアシスト部20は、路面反力に応じた操舵反力がハンドル側に返ってくるようにするためのベースアシスト指令Tb*を生成し、補正部30は、車両の不安定な挙動が適切に収斂するようにベースアシスト指令Tb*を補正するための補正トルク指令Trを生成する。そして、これら各指令Tb*,Trの和が最終的なアシストトルク指令Taとなる。ベースアシスト部20は、自身が生成したベースアシスト指令Tb*と実際に検出された操舵トルクTsに基づいて路面負荷を推定し、その推定した推定負荷Txに基づいて目標操舵トルクTs*を生成し、その目標操舵トルクTs*と操舵トルクTsの偏差に基づいてベースアシスト指令Tb*を生成する。
(もっと読む)
油圧式パワーステアリング装置
【課題】油圧制御バルブの開度が急変して作動油の圧力が低下した場合に、パワーシリンダへの作動油の供給量が低下するのを抑制できる油圧式パワーステアリング装を提供する。
【解決手段】ポンプ回転数補正部63は、バルブ開度指令微分値演算部71と、ポンプ回転数補正値演算部72と、補正値加算部73とを含んでいる。バルブ開度指令微分値演算部71は、バルブ開度指令値設定部52によって設定されるバルブ開度指令値θB*の時間微分値(バルブ開度指令微分値)を演算する。ポンプ回転数補正値演算部72は、バルブ開度指令微分値に基づいて、ポンプ回転数指令値VP*の補正値(ポンプ回転数補正値)を演算する。補正値加算部73は、ポンプ回転数補正値を、ポンプ回転数指令値設定部62によって設定されたポンプ回転数指令値VP*に加算する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(63)を有する。そして、モータの回転角度と、ローパスフィルタのゲインの関係を示すマップ(61)から演算された値により、ローパスフィルタ(63)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(63)に基づいて出力されるモータ回転角速度に基づき、モータの逆起電力により発生する電流を相殺するように、モータに電流を流す非干渉制御を実行する。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(65)を有する。そして、モータ回転角速度を更に微分してモータ回転角加速度を演算するモータ回転角加速度演算手段(61)と、モータ回転角加速度演算手段(61)により演算された値により、ローパスフィルタ(65)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(65)に基づいて出力されるモータ回転角速度に基づき、モータの速度起電力により発生する電流を相殺するように、モータ電圧指令値を定める非干渉制御を実行する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】低温から高温の環境化においても常に操舵性能が良好な電動パワーステアリング装置の制御装置を提供する。
【解決手段】電流指令値に基づいてデッドタイム特性値を演算するデッドタイム特性部211と、操舵状態判定部210と、デッドタイム特性値のゲインを可変するゲイン部212と、操舵状態判定部の判定に従って極性判定方法を切替えられると共に、モータのモデル電流値に基づいて極性を判定する極性判定部213と、インバータの温度を検出する温度センサと、温度に対応したデッドタイム温度補正値を算出するデッドタイム温度補正値算出部215と、極性付きデッドタイム補償値に対してデッドタイム温度補正値を演算処理してデッドタイム補償値を出力する演算処理部216とを備え、デッドタイム補償値を電圧指令値に付与することにより、デッドタイムを補償して温度に応じてデッドバンドを最適化する。
(もっと読む)
トルクセンサ及びこれを備えた電動パワーステアリング装置
【課題】検出コイル、非磁性の円筒部材、センサシャフト部を使用してトルク検出を行う際に、検出コイルへの磁束量を増加させて検出精度を向上させることができるトルクセンサ及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】一対の検出コイル13a,13bの内周面側に所定間隔を保って対向して入力軸及び出力軸の一方に連結された非磁性の円筒部材12を配置し、該円筒部材12の内周面側に、軸方向の凸条11aを円周方向に所定間隔で形成し、前記入力軸及び出力軸の他方に連結されたセンサシャフト部11を配置し、前記円筒部材12は、前記一対の検出コイルに個別に対向し、円周方向に位置を異ならせて形成された前記一対の検出コイルで互い逆方向にインピーダンスを変化させる一対の磁束透過用窓12a,12bを形成し、該一対の磁束透過用窓の軸方向両端部に空気より透磁率の高い磁路部材17を配置した。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】精度良くモータ回転角を推定することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】モータ回転方向推定部は、誘起電圧値Eが所定電圧値Ethよりも大きい場合には(ステップ201:YES)、各軸誘起電圧値eα,eβの符号の組み合わせ、及びこれらの大小関係に基づいてモータの粗回転位置を推定し(ステップ203)、粗回転位置の遷移に基づいてモータの回転方向を推定するようにした(ステップ208)。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】その目的は、モータ回転角速度を判定条件に加えることなく、精度良く通電不良を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】通電不良検出部71は、相電流値が所定電流値以下であり、且つ電源電圧Vpsが所定電圧値以上である場合に、連続してDUTY指令値が所定電流値に対応する所定範囲の上限値以上であるという第1の判定条件、及び連続してDUTY指令値が下限値以下であるという第2の判定条件を満たすか否かを判定する。そして、通電不良検出部71は、第1の判定条件を満たす状態が継続する時間である第1の継続時間と、第2の判定条件を満たす状態が継続する時間である第2の継続時間とをそれぞれ計測し、第1又は第2の継続時間が、高速回転時におけるモータ21の回転周期に基づく判定時間を超えた場合に、通電不良が発生したと判定するようにした。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することが可能な電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、γ軸電流指令値Iγ*の上限値(電流指令上限値Ilim)を演算する電流指令上限値演算部73と、γ軸電流指令値Iγ*を電流指令上限値Ilim以下に制限する電流指令値制限部74とを備える。そして、電流指令上限値演算部73は、車速Vが速いほど、より低い値となるように電流指令上限値Ilimを変更(演算)する。
(もっと読む)
電動パワーステアリング装置
【課題】電流センサが故障した場合でも、アシスト制御中にモータの断線や短絡といった異常を検出できるようにする。
【解決手段】電流センサ異常検出部91により電流センサ31の異常が検出された場合、基本電圧演算部81が目標電流I*に比例した基本電圧V0を計算し、電圧値重畳部83が、基本電圧V0に、交流電圧信号生成部82から出力された交流電圧信号である重畳信号V1を加算して電圧指令値V*を求める。モータ異常検出部92は、操舵トルクtrの振動の大きさを計算し、振動の大きさが基準値未満となる場合には、モータ20の通電路に異常が生じていると判定する。
(もっと読む)
電動パワーステアリング装置
【課題】第1電流センサのバックアップ用として設けた低分解能の第2電流センサを使っている場合でも、良好な操舵アシストを行う。
【解決手段】第1電流センサ31の異常が検出されている場合には、異常時モータ制御量演算部80が電圧指令値V*を演算する。異常時モータ制御量演算部80は、操舵トルクtrに比例した基本電圧V0に、逆起電圧の推定値に相当する補正電圧V1と、逆起電圧を推定するための交流電圧V2とを加算した値(V0+V1+V2)を電圧指令値V*として設定する。
(もっと読む)
電動パワーステアリング装置
【課題】モータに負荷トルクが印加された状態でモータ電流が極小化する状況を回避して、モータ制御の安定性を好適に維持することのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルク(τ)との間のトルク偏差Δτに基づいてγ軸電流増減値ηを演算するγ軸電流増減値演算部71と、当該γ軸電流増減値ηを積算する積算制御部72とを備える。そして、電流指令値演算部61は、そのγ軸電流増減値ηの積算値をγ軸電流指令値Iγ*とする。また、電流指令値演算部61は、γ軸電流増減値ηを補正する増減値調整演算部73を備えるとともに、同増減値調整演算部73は、車両が直進状態にあるか否かを判定する。そして、増減値調整演算部73は、車両が非直進状態にあると判定した場合には、γ軸電流増減値ηを「0」に補正して積算制御部72に出力する。
(もっと読む)
モータ制御装置
【課題】バッテリなど一定電力を供給する車両のシステムにおいて、モータに過大な電流供給があった場合、モータ電流指令値に制限をかけるとモータ電流の制限に遅れが発生し、電流制御の応答性に課題があった。
【解決手段】モータ1に与える電流指令値とモータ電流とに基づいてモータを駆動するためのモータ電圧指令値を算出するモータ電圧指令値演算手段12と、モータに供給する電源電圧を検出する電源電圧検出手段7と、電源電圧とモータ回転速度から、U相、V相、W相の各相モータ電圧へのPWMの指令Duty値を制限するDuty指令制限値を算出するモータ電圧指令制限値算出手段13と、Duty指令制限値によって、モータ電圧指令値を制限するモータ電圧指令値制限手段14とを備え、モータ電圧指令値に制限をかけることにより電流制御の応答性を早めた。
(もっと読む)
トルク検出装置および電動パワーステアリング装置
【課題】 レゾルバの検出コイルの一方が断線した場合でも、操舵トルクを検出できなくなる状況を低減する。
【解決手段】 第1レゾルバ110,第2レゾルバ120は、ハンドル中立状態におけるロータ部110r,120rとステータ部110s,120sとの相対位置関係が、sin相検出信号の振幅がゼロでcos相検出信号の振幅が最大となる位置を基準位置(θe=0°)として、その基準位置に対して電気角で45°+90°×K(Kは整数)だけずれるように、組み付け位相が設定されている。これにより、ハンドル中立状態においては、レゾルバの電気角が回転角不確定領域に入らなくなり、操舵トルクを検出できなくなる頻度が低下する。
(もっと読む)
1 - 20 / 279
[ Back to top ]