
Fターム[3F022KK20]の内容
倉庫・貯蔵装置 (25,393) | 搭載ピックアップ装置(積込み機、積降し機) (1,008) | ロボット (92)
Fターム[3F022KK20]に分類される特許
1 - 20 / 92
ロボット仕分けシステム及び仕分け済み物品の製造方法
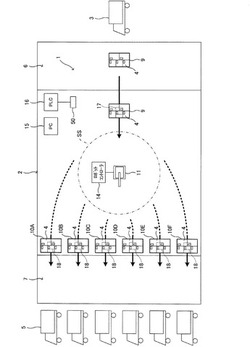
【課題】既存の設備で、被仕分け物品に関する仕分けパラメータの変動に柔軟に対応して仕分けを行うことができるようにする。
【解決手段】ロボット仕分けシステム1は、搬入側カーゴ9と、搬出側カーゴ10A〜10Fと、アーム24、吸着パッド25、レーザセンサ26、ビジョンセンサ27を有するロボット11と、ロボットコントローラ14を有しており、レーザセンサ26で搬入側カーゴ9に載置された複数の荷物4それぞれの上面までの距離情報を取得し、上面が最も高い位置にある荷物4を特定し、ビジョンセンサ27で上記特定された特定の荷物4の外形情報を取得すると共に特定の荷物4の仕向地情報の取得を図り、特定の荷物4の形状及び大きさを算出し、特定の荷物4に対応した特定の仕向地区域を決定し、特定の荷物4を吸着パッド25で持ち上げつつ特定の仕向地区域に対応した特定の搬出側カーゴ10へ積み付けるように、ロボット11の動作を制御する。
(もっと読む)
ロボット仕分けシステム、ロボット装置、及び仕分け済み物品の製造方法

【課題】作業者の労力負担を低減しつつ信頼性を向上できるようにする。
【解決手段】ロボット仕分けシステム1は、搬入側カーゴ9と、搬出側カーゴ10A〜10Fと、アーム24、吸着パッド25、レーザセンサ26、及びビジョンセンサ27を有するロボット11と、ロボットコントローラ14とを有しており、レーザセンサ26により搬入側カーゴ9に載置された複数の荷物4それぞれの上面までの距離情報を取得し、上面が最も高い位置に存在する荷物4を特定し、ビジョンセンサ27により上記特定された特定の荷物4の外形情報を取得すると共に特定の荷物4の仕向地情報の取得を図り、特定の荷物4の形状及び大きさを算出し、特定の荷物4に対応した特定の仕向地区域を決定し、特定の荷物4を吸着パッド25により持ち上げつつ特定の仕向地区域に対応した特定の搬出側カーゴ10へ積み付けるように、ロボット11の動作を制御する。
(もっと読む)
アライメント調整装置、ライブラリ装置及びアライメント調整方法
【課題】 カートリッジ等の被搬送物を搬送するロボットのアライメント調整を自動化し、安定したハンドリングを可能にすることにある。
【解決手段】 アライメント調整装置、ライブラリ装置又はアライメント調整方法であって、収納棚(10)に被搬送物(カートリッジ4)を搬入し、又は収納棚から被搬送物を搬出する少なくとも2つのロボット(6、8)を備え、ロボットの1つでセルアクセスの異常が発生した場合に基準フラグ(18A、18B、18C)の測定前に、アクセスの異常時のロボットから別のロボットに切り替えてアクセスを行い、複数のロボットにセルアクセスの異常が発生した場合、対象セルフラグ(19)を測定する。また、複数のロボットにエラーが発生する場合、セル側の経年変化を判断し、対象セルフラグの再測定を行う。
(もっと読む)
荷物管理システム
【課題】 手荷物の預託手続を自動的に行うことができ、利用者は、手荷物預かりカウンタに立ち寄ることなく、搭乗口に向かうことができる荷物管理システムを提供する。
【解決手段】 制御部16により、航空券読み取り部12により読み取った搭乗券の搭乗情報を通信制御部19を介して搭乗管理システム20に送信し、搭乗管理システム20の搭乗予約情報と搭乗情報との照合が完了した後、制御部16により、搭乗情報および荷物情報が記録された荷物用RFIDタグ14を発券部15により発券し、利用者が荷物に荷物用RFIDタグ14を貼り付けた後、制御部16により、タグ通信部により荷物管理サーバ24に搭乗情報および荷物情報を送信し、荷物管理サーバ24により、搭乗管理システム20の搭乗予約情報と荷物情報とを関連づけておく。
(もっと読む)
製品移載システム
【課題】作業者の安全を確保して、パレットへの製品の移載、パレットの搬入及び製品が載ったパレットの搬出を迅速に行うことができる製品移載システムを提供すること。
【解決手段】製品移載システム1は、搬入エリアA1に設置した製品搬入台2と、運搬エリアA3に形成した複数の移載室5と、移載エリアA2に設置した移載装置3とを備えている。製品移載システム1は、いずれかの移載室5Aにおける手前側のシャッター52を開けて、この移載室5Aにおいて有人運搬手段6がパレット7の運搬を行うときには、この移載室5Aにおける奥側のシャッター51を閉じ、かつ、他の移載室5Bにおける手前側のシャッター52を閉じるとともに奥側のシャッター51を開けて、移載装置3が、他の移載室5Bに運搬したパレット7へ製品8を移載可能に構成されている。
(もっと読む)
寸法測定装置および寸法測定装置を備えた荷搬送ロボット
【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
金属リングの積載方法
【課題】金属リングを金属リング用搬送ラックに簡易な方法で積載し、工数の低減を図ることができる金属リングの積載技術を提供することを課題とする。
【解決手段】ロボットハンド41、41を矢印(5)のように、縮める。金属リング11の外力は除去され、金属リング11は想像線で示す金属リング11の形状となり、金属リング用搬送ラック10に係止められる。
【効果】ロボットハンドにて複数個の金属リングを多角形開口部から金属リング用搬送ラック内へ挿入するので、一度に金属リングを金属リング用搬送ラックに係止めすることができる。結果、金属リングを金属リング用搬送ラックに簡易な方法で積載し、工数の低減を図ることができる。
(もっと読む)
板状部材移載設備
【課題】板状部材を立てた状態でラックに挿入したり、立てた状態のままラックから取り出したりすることができる板状部材移載設備を提供する。
【解決手段】ストッカ設備1は、ガラス板2が立てた状態で前後方向に並べて収納されるラック32と、ガラス板2を左右に移動させてラック32との間で受け取りするトラックロボット10を備えている。トラックロボット10は、トラック側走行基台14と、フリップと、トラック側搬送基台と、ローラとを有する。フリップは、フリップアクチュエータによりトラック側走行基台14に対して軸線回りに回動し、回動することでそこに載せられたガラス板2を立てたり倒したりするように構成されている。ローラは、トラック側搬送基台に回動可能に設けられ、回動することでガラス板2をラック32内に送れるように構成されている。
(もっと読む)
制御プログラム、制御方法および制御装置
【課題】操作性を向上すること。
【解決手段】異なるアクセス面を有し、一方から利用者が記憶媒体3を出し入れ可能であり、他方からマウント機構2が記憶媒体を出し入れ可能であるセル4aを複数有する収納部4から記憶媒体3を取り出しドライブ装置5にマウントするマウント機構2を制御する制御装置1を有する。制御装置1が有する判断部1bは、マウント機構の制御中にセル内で記憶媒体3へのアクセスの競合が発生したか否かを判断する。記憶媒体3へのアクセスの競合が発生したと判断された場合に、所定時間待機する。待機手順による所定時間の待機後に、再度、記憶媒体3へのアクセスの競合が発生したか否かを判断する。
(もっと読む)
大型基板収納装置
【課題】基板を一時的に収納、保管するための大型基板収納装置において、ロボット等によるランダムアクセス可能で、基板収納効率が良く省スペースで、メンテナンスや目視確認実施を安全に行える基板収納装置を提供する。
【解決手段】多段の棚状の収納部を備え、任意の対象とする収納部にロボットハンド等の基板搬送装置により基板を一枚づつ一時的に収納・保管・払い出しを行う基板収納装置において、基板の格納/払い出し時に任意の対象とする収納部と該収納部上部の収納部間が開口してロボットハンド等の基板搬送装置がアクセス可能となる機構を備え、且つ、前記収納部のそれぞれは、ロボットハンド等の基板搬送装置と干渉しないスペースに所定の間隔で設けられた基板支持ピンを有する複数本の支持体が側壁フレームに横架され、前記支持体が個別の前記収納部毎に動くことで前記収納部毎の前記支持ピンが上下に可動な機構を備えている。
(もっと読む)
処理装置及び対象物保管装置
【課題】保管装置内の対象物に処理を施す際の対象物の遠隔搬送を省略でき、しかも対象物の受け渡しに関する時間を短縮し、操作や機構を単純化できる処理装置及び対象物保管装置を提供する。
【解決手段】処理を施す物質を収容した培養容器を収納する搬送用コンテナ1と、ロボットアーム4が設けられた処理手段144を有する処理装置15と、ステージ2と、ストッカを有する培養容器保管装置13とから構成され、搬送用コンテナ1をステージ2と培養容器保管装置13との間をロボットアーム4で移動させるとき、ステージ2と処理装置15とに配置されたガイド部材10に保持された、振動を減衰しつつ搬送用コンテナ1を移動可能に支持する支持機構3(車輪及び車軸)の上で行う。
(もっと読む)
基板搬送設備
【課題】基板移載装置による基板の移載を適確に行うことができる基板搬送設備の提供。
【解決手段】基板を出し入れする出し入れ口及び基板を上下方向に間隔を隔てる状態で複数枚収納可能な基板収納空間を備えた容器本体3と、その容器本体3を載置支持可能で且つ容器本体3を載置支持した状態で基板収納空間に清浄空気を送風するファンフィルタユニットを備えた載置支持部材4とを備えた基板用収納容器2、容器本体3を載置支持した載置支持部材4を支持台8に対して上方から載置支持させる形態で基板用収納容器2を支持台8に搬送する容器搬送装置、及び、基板用収納容器2を支持台8に載置支持させた状態で容器本体3に直接に当接することにより、容器本体3の水平方向での位置を基板移載装置が出し入れ口を通して基板を移載するための基板移載用位置に調整する位置調整手段51を設ける。
(もっと読む)
貯蔵スタック
本発明は、低温試料貯蔵装置(3)に試料容器(2)を貯蔵する貯蔵スタック(1)について説明する。低温試料貯蔵装置(3)には、デカルトのX、Y、およびZ座標に従って、試料容器(2)を個々の貯蔵スタック内部のX/Y平面に水平に位置決めし、かつ低温試料貯蔵装置(3)内の個々の貯蔵スタック(1)をZ方向に垂直に移動させるように作動するロボット(4)が装備されている。試料貯蔵装置(3)は、互いに隣接しかつ垂直Z方向に平行に配向されるようになされたmxn個の貯蔵スタック(1)を収容するための貯蔵領域(7)を画定する。個々の貯蔵スタック(1)は、Z方向に延在しかつ貯蔵スタック(1)の中に挿入された試料容器(2)を支持するための多数の貯蔵ウェブ(12)を備えた第1および第2の剛性側方支持フランジ(11’、11’’)と、前記側方支持フランジ(11’、11’’)を互いにリジッドに連結する剛性背面パネル(13)と、少なくとも1つの側方支持フランジ(11’、11’’)および/または前記背面パネル(13)の下端部に固定された剛性底部プレート(14)と、少なくとも1つの側方支持フランジ(11’、11’’)および/または前記背面パネル(13)の上端部に固定された剛性断熱カバー(15)と、を含む。剛性断熱カバー(15)は、ハンドリングプレート(16)および断熱ブロック(18)を含む。貯蔵スタックアレイ(8)の全ての貯蔵スタック(1)のm×n個の断熱カバー(15)の複数は、本質的に連続する断熱層(20)を低温試料貯蔵装置(3)の貯蔵領域(7)に形成する。全ての貯蔵スタック(1)には担持要素(21、27)が設けられている。これら担持要素(21、27)は、各個々の貯蔵スタック(1)の底部プレート(14)を低温試料貯蔵装置(3)の貯蔵領域(7)の底部構造体(22)に静的に接続する。これら担持要素(21、27)は、個々の貯蔵スタック(1)およびこの貯蔵スタック(1)に挿入される全ての試料容器(2)の全重量を担持し、かつこの全重量を低温試料貯蔵装置(3)の貯蔵領域(7)の底部構造体(22)に与えるようになされている。  (もっと読む)
(もっと読む)
カセット搬送装置
【課題】基板を収納するカセットをラック内から基板搬出作業部に搬送するとき、当該カセットの基板出し入れ用開口部を閉じて、搬送途中でもカセット内の雰囲気を良好に保持できるようにする。
【解決手段】昇降キャレッジ15上に、当該昇降キャレッジ15上の退入位置と横側方に進出した進出位置との間で水平出退移動自在なカセット移載用支持台20が設けられたカセット搬送装置において、昇降キャレッジ15上でカセット移載用支持台20を水平出退移動自在に支持する支持部(ターンテーブル16)に、前記カセット移載用支持台20上に支持されて昇降キャレッジ15上の定位置に移載されたカセット6の基板出し入れ用開口部6aを閉じる蓋22が設けられた構成。
(もっと読む)
ロボット及び物品搬送システム
【課題】機能を維持しながらもより小型化することができるようにした、ロボット及び物品搬送システムを提供する。
【解決手段】アーム部材23と、アーム部材23を揺動させるアクチュエータ22と、アーム部材23の先端に設けられるハンド部材24と、アーム部材23とハンド部材24とを回転可能に連結する関節部材と、アクチュエータ22を支持し直線駆動するリニアアクチュエータ3と、アクチュエータ22及びリニアアクチュエータ3を協働させての各ハンド部材を進退方向に直線移動させるコントローラとを有して構成する。
(もっと読む)
ローダ装置
【課題】収容箱をキャスター輪付き台車に載せた被搬送体のキャスター輪を介しての移送を自動化できるローダ装置、搬入された被搬送体を方向変換して複数の保管兼搬送列へ振り分けるローダ装置、装置周辺を平坦な床面に維持できるローダ装置等を提供する。
【解決手段】被搬送体Wの上端部に係脱可能な係合部材を含むローダ本体と、ローダ本体を昇降させる昇降機構と、ローダ本体を保管兼搬送列61a〜61dの列方向と直交する第1方向へ移送する第1移送機構と、ローダ本体を列方向と平行な第2方向へ移送する第2移送機構と、ローダ本体を鉛直軸心回りに少なくとも90度回動可能な回動機構とを備え、搬入された被搬送体Wに上方からローダ本体を対向させてから下降させて、ローダ本体を被搬送体Wの上端部に係合させ、ローダ本体による上方から牽引とキャスター輪の床面上の転動を介して被搬送体を搬送する。
(もっと読む)
基板用容器貯蔵システム
本発明は、貯蔵システム及び貯蔵システムの作動方法に関する。貯蔵システムは、処理すべき基板を取扱うために用いられるツールの高さよりも高い位置に位置決めされた貯蔵システム組立体を有する。貯蔵システムは、基板用の1つ又は2つ以上の容器を局所的に貯蔵する。貯蔵システム組立体は、複数の貯蔵棚を含み、複数の貯蔵棚の各々は、容器を支持する棚特徴部を備えた棚プレートを有する。複数の貯蔵棚の各々は、チェーンに結合されて水平方向移動可能であり、レールに結合されて1つ又は2つ以上の位置まで案内される。モータが、チェーンを移動させる駆動スプロケットに結合され、複数の貯蔵棚の各々が、レールに沿って1つ又は2つ以上の位置まで一緒に移動する。レールは、直線状の少なくとも幾つかの直線部分と、幾つかの非直線部分を有し、直線部分及び非直線部分は、ループをなして配置される。  (もっと読む)
(もっと読む)
ストッカーシステム及びストッカー管理方法
【課題】ストッカーのシェルフの平坦度を容易に点検することのできるストッカーシステム及びストッカー管理方法を提供する。
【解決手段】本発明のストッカーシステムは、被積載物を積載できるシェルフ110を備えたストッカー100と、ストッカー側に被積載物を移動できるように、ボディー部210とボディー部に連結されたアーム部230とを備えたラックマスター200と、アーム部上に積載できるように形成されたセンサーユニット300とを備え、センサーユニット300は、アーム部上に積載された状態でシェルフの上部に移動した時、センサーユニットとシェルフとの間の相互位置関係を複数の地点で測定するように複数の変位センサーが配置されていることを特徴とする。
(もっと読む)
保管及び取り出しシステム
各々が取り出し通路、取り出し通路内に配されている保管場所、及び取り出し通路へのアクセスを提供する少なくとも1つの搬送デッキを有する保管レベルの垂直アレイと、各々がマルチレベル垂直コンベヤシステムから非収容ケースユニットを受け取る保管レベルの垂直アレイへかつそこから非収容ケースユニットを搬送するマルチレベル垂直コンベヤシステムと、保管レベルの各々に配置されて、保管場所の各々とマルチレベル垂直コンベヤシステムとの間で非収容ケースユニットを搬送する少なくとも1つの自立搬送装置と、搬送デッキ及び取り出し通路を通って保管場所のうちの所定の1つに達する主アクセス経路を生成し、かつ主経路が通過不可能な場合に保管場所のうちの当該所定の1つに達する副経路を生成するコントローラと、を含む保管及び取り出しシステムである。  (もっと読む)
(もっと読む)
バラ品の仕分けパレット詰め合わせ方法
【課題】 ピッキングロボットの稼働率の向上と設備の省スペース化を図る。
【解決手段】 同一品種の物品を複数収容した単品パレットを単品パレット搬送コンベヤで同一品種が連続するようにピッキングゾーンへ供給し、仕分け先別の仕分けパレットを仕分けパレット搬送コンベヤでピッキングゾーンへ供給し、ピッキングロボットで単品パレットから物品を取り出して仕分けパレットへ投入し、その仕分けパレットにその品種の物品投入が完了すると送出コンベヤで送り出し、送出コンベヤ上の仕分けパレットが詰め合わせ未完の場合は保管部で一時保管し、詰め合わせ完了の場合は搬出し、単品パレットが空になると搬出して次の単品パレットを供給し、次品種の単品パレットが供給されると保管部の仕分けパレットを再送込みコンベヤでピッキングゾーンへ戻し、これらの工程を全仕分け先に物品が仕分けられるまで繰り返す。
(もっと読む)
1 - 20 / 92
[ Back to top ]