
Fターム[4C097AA02]の内容
補綴 (46,288) | 適用又は代替する身体箇所又は身体部位 (7,438) | 人工骨・骨等の骨格 (3,787) | 足;脚等の下肢 (1,722)
Fターム[4C097AA02]の下位に属するFターム
関節 (1,504)
Fターム[4C097AA02]に分類される特許
201 - 218 / 218
衝撃吸収及び制御回転を有する補綴デバイス用の真空ポンプ
義肢で使用される衝撃吸収及び制御回転を有する真空ポンプ(120)。このポンプは第1のチャンバを有するハウジング(220)と、第1のチャンバによって受容されてその中で往復動作を行うように形成されたシャフト(210)とを有する。ハウジングとシャフトとがポンプチャンバ(223)を形成する。ピストン(216)がシャフトへ連結されており、ポンプチャンバ内に配置されている。インテークポート(225)及びエキゾーストポート(226)がポンプチャンバへ流体連結されている。ハウジングに対するシャフトの回転を制御するために、ポンプに対して回転構造(230−234)が取り付けられている。シャフトに対する衝撃を吸収するために、衝撃吸収構造がポンプ内に設けられている。この衝撃吸収構造には、空気圧スプリング(260)及び機械式スプリング部材(250)の両方が設けられている。場合によっては、アダプタ(212)が一体状のパイロン人工フットのパイロンへシャフトを連結している。  (もっと読む)
(もっと読む)
インプラントの挿入、位置決めおよび取出し器具および方法

本発明は、インプラントに衝撃を付与して骨内に挿入し、および/または、骨からインプラントを引出し、抽出し、または、取出し、および/または、骨内でインプラントの位置変更を行う器具である。本発明の器具は、シャフトと、シャフトに連結されたヘッドと、ヘッドを通るチャネルと、ロッキング機構とを有する。シャフトにハンドルを設けることもできる。一位置では、ロッキング機構はヘッドと係合し、ヘッドがシャフトに対してピボット回転し、および/または、回転することを防止する。他の位置では、ロッキング機構はヘッドから離脱し、ヘッドがシャフトに対してピボット回転し、および/または、回転することを可能にする。器具はインサータに使用できる。インサータの一部をチャネル内に保持する手段をロッキング機構に設けることができる。インプラントを骨内に挿入し、および/または、インプラントを骨から引出し、取出す方法も提供する。 (もっと読む)
機能調整可能な義足
義足(100)は足竜骨(101)および弾性を有する腓脛部(105)を含み、腓脛部の下端が足竜骨に連結されて義足の足関節を形成する。足竜骨は、足前部、足後部、および足前部と足後部のあいだに延在する足中央部を有する。腓脛部は、前方に向けて突出した湾曲部(106)を介して足竜骨から上向きに延出し、義足の足前部と一体に形成された連結要素(107)を介して足竜骨に固締されている。腓脛部の下端は逆方向に湾曲し(110)、連結要素の逆方向に湾曲した部分(112)に収容されている。  (もっと読む)
(もっと読む)
調整可能機能を備えた義足
足部と、足首部と、シャンク部と、義足の力負荷中にエネルギーを蓄積し、力負荷解除中に該蓄積されたエネルギーを戻すことにより歩行時の義足による推進力に対して発生した動力を増加するための義足上の後部カーフ装置(169)とを備えた下肢義足のための装置。いくつかの実施形態における装置は、シャンク部の上部および義足の下部のあいだに延びた可撓性のストラップなどの少なくとも1つの細長部材(171)と、該細長部材に連結された自由端を有する少なくとも1つのコイルばね(170)を含む。前記コイルばねは、エネルギーを蓄積するためにシャンク部上端の前方移動を受けて細長部材によって拡張される。  (もっと読む)
(もっと読む)
機能調整式義足
義足(124)は足竜骨(165)および前記足竜骨に連結された腓脛部を含み、義足の足関節部を形成する。装置(125)は前記腓脛部の上端と前記義足の下部の間に連結され、前記義足の使用時に前記腓脛部の上端の後ろへの動きに力を補填し、前記腓脛部の上記上端の前への動きを制御するために使われる。前期装置(125)は歩行中の前記腓脛部の前記上端の前への動きに伴う力が負荷されたときエネルギーを蓄え、力から解放されたとき蓄えたエネルギーを戻して、運動力として歩行中に義足が発生した使用者の体への推進力が加えられるばねを有する。 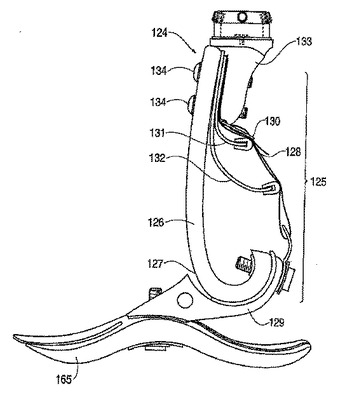 (もっと読む)
(もっと読む)
機能調整式義足
足、足関節、および足関節上部の脛部を備えた弾性を有する下肢端部用補綴装具は、人の歩行中の活発な推進段階において補綴装具に力が負荷されるときエネルギーを蓄え、歩行の後期のスタンス段階において蓄えたエネルギーを放出して人のつれて動く下肢と身体の推進を補助するための人工筋肉(190)が脛部(191)に設けられている。  (もっと読む)
(もっと読む)
義肢用装着器具

本発明は、義肢を患者の骨に装着するための器具(1)を提供するものである。本器具は、骨インプラントに取り付けられる近接部コンポーネント(2)と、義肢に取り付けられる末梢部コンポーネント(3)と、近接部及び末梢部コンポーネント(2,3)を連結し、使用において、曲げ力及び/又はねじれ力が義肢のみに適用され、その力が閾値レベルを超えたとき、装着器具(1)内で可動結合することにより、その力が調節される連結部材(4,5)と、を備える。そのため、本器具(1)は患者の骨を保護する安全可動結合装置として機能する。 (もっと読む)
ナノ構造表面の医療装置応用
本発明は新規ナノファイバー増大表面積基板及び前記基板を含む各種医療装置用構造、並びに前記基板と医療装置の方法及び使用を提供する。 (もっと読む)
動作制御式足ユニットのためのシステム及び方法
肢の動きに関連するシステム及び方法。一例では、補装具システム又は矯正具システムのようなシステムは、足ユニットと下肢部材との間の角度を積極的に制御又は調節するアクチュエータを備える。処理モジュールは、センサモジュールから得たデータをもとにアクチュエータの動きを制御する。例えば、検出するモジュールのデータは、使用者の歩行に関連する情報を含み、健常な足首の自然な動きを実質的にまねるように足ユニットを調節するために使用される。さらに、このシステムは、例えば、平地での歩行、階段の上下歩行、傾斜面の上下歩行や使用者の他の種々の動きに対応できる。更に、処理モジュールは、使用者による入力信号を受信したり外部インターフェースにより出力信号を表示してもよい。例えば、処理モジュールは、その使用者による踵の高さの入力を受信してもよい。  (もっと読む)
(もっと読む)
膝蓋−大腿義足
【解決手段】 膝蓋−大腿義足は膝蓋骨と大腿骨の間の連動面の置換のために提供される。前記義足は滑車溝を保護するように形状が決められており、顆の関節面上に伸びることなく、顆間切痕内部へ伸びる。滑車溝および顆間切痕の一部が切除され、前記義足は部位が切除された大腿骨に埋め込まれる、膝蓋−大腿義足を埋め込む方法もまた提供される。 (もっと読む)
組織除去装置およびその方法
電磁誘導型カッターは、霧化流体粒子と相互作用するようにされる。組織除去装置はその吸引カニューレが、電磁誘導による切断力を患者の体内の部位に伝達する流体ガイドおよびエネルギーガイドを収納しており、硬質組織または柔組織を吸引する。カニューレにはカニューレ遠位端が設けられている。カニューレの近位端には、吸引源への流体流接続部が設けられている。分断された硬質組織または柔組織と流体は、カニューレの近位端にある吸引源により、カニューレ遠位端およびカニューレを通して吸引される。硬質組織除去または柔組織除去を目的として、そのようなカッターを使う方法も開示する。 (もっと読む)
器械化義足
【課題】 本発明は、コントローラにより制御された義肢(14)の作動と共に使用される器械化義足(20)を提供する。
【解決手段】 この器械化義足(20)は、義肢(14)に器械化義足(20)を接続するためのコネクターと、このコネクターに接続された足首(足関節)構造と、この足首構造に接続された地面係合部材と、足に沿う重量分布の変化を検出するための少なくとも1つのセンサー(22a,22b,24a,24b,26)と、このセンサーから前記コントローラへ信号を伝達するためのインターフェースとを具備してなることを特徴とする。
 (もっと読む)
(もっと読む)
医療用移植片および繊維誘発剤
本発明は一般的に、生きた組織への付着性を高める、または該組織内への混入を容易にする医療用移植片(medical implant)を準備するための薬学的組成物、方法および装置に関し、さらに具体的には、その組成および方法に関するものである。移植片が配置されたときに、使用しなければ発生しないような繊維形成を誘発するために、または移植片と宿主組織の間の繊維形成を高めるために、移植片が繊維形成剤と組み合わせて使用される。 (もっと読む)
イオン注入による骨内インプラント又は医療用プロテーゼの製造方法、及びそれにより製造された骨内インプラント又は医療用プロテーゼ
本発明は、微細な表面凹凸及び/又は酸化物層を有する医療用のプロテーゼ又はインプラントの製造方法に関し、該方法は金属、金属合金、又は生体適合複合材料から調製した骨内インプラント又はプロテーゼに、特定量のCO、C、H、N、又はO等のイオンを注入する処理工程を含む。この表面処理によって、骨内インプラント又はプロテーゼのナノレベルでの粗さ、親水性、化学組成等の表面特性が変化し、骨との一体化が著しく向上する。  (もっと読む)
(もっと読む)
義足
【課題】実際の足の滑らかな動き及び自然な歩行を良好にシミュレートする義足の提供。
【解決手段】2つ又はそれ以上のプラットフォーム(24、26、58)の間に延びて間に1つ又はそれ以上の可撓性ヒンジ(28、50、52)を形成する、ほぼ平面で弾性的に可撓性のフットベッド(22)の形態の地面係合ベース(20)を含む義足(10)。プラットフォームは、つま先プラットフォーム(24)、中央部分プラットフォーム(26)及びかかとプラットフォーム(58)を含む。支持シャンク(30)は、足の足首領域のほぼ上方に位置決めされるようにプラットフォームの上方に配置される。第1のバネ(34)は、つま先プラットフォーム(24)から支持シャンク(30)まで延びる。第2のバネ(38,40)は、支持シャンク(30)から中央部分プラットフォーム(26)まで延びる。第3のバネ(46)は、支持シャンク(30)からかかとプラットフォーム(58)まで延びる。
(もっと読む)
成型品の製造方法
【課題】
【解決手段】非金属繊維をエポキシ樹脂に含浸して、当該繊維が1枚のシートをなすよう整列させるステップと;前記シートから複数のプレプレグを切り出すステップと;前記プレプレグを、圧縮成型の型枠内に堆積するよう積層するステップと(好ましくは、プレプレグは、繊維が縦方向及び/又は横方向のプレプレグを交互に繊維が交差するよう配置される);高温下で圧縮成型するステップと;圧縮枠から成型品を取り出すステップとを具える成型品の製造方法である。この製造方法により成型された成型品が提供される。好ましくは、この成型品はJ型パイロン(11)とソールプレート(23)を具える義足である。
(もっと読む)
髄内釘アセンブリ
【課題】固定ピンを緩まないように固定できるネイルアセンブリを提供する。
【解決手段】髄内釘アセンブリは、壁部に少なくとも一つの開口部14,18を有する髄内ネイルコンポーネント2と、その中を貫通する少なくとも一つの開口部32を有する固定スリーブとを備えている。固定スリーブ及びネイルコンポーネントの一方は中空内腔を有し、固定スリーブ及びネイルコンポーネントの他方を同軸でスライドする配置で嵌めて、ネイルコンポーネントの壁部にある開口部を固定スリーブにある開口部と位置を揃えることができるようになっている。固定ピン19が、ネイルコンポーネント及び固定スリーブの壁部にある開口部に、それらの開口部の位置が揃えられたときに、横向きに挿入して通される。アクチュエータを用いて固定スリーブをネイルコンポーネントに対し相対的に軸方向に動かし、ネイルコンポーネント及び固定スリーブにある、位置を揃えた開口部に挿入して通されている固定ピンをしっかりと保持する。
(もっと読む)
脚付きロボット用の流体移動によるバランスシステム
本発明は、動いている間または任意の仕事を遂行している間にバランスが失われることを防止し、同様に二つ以上の脚部を有するロボットが重み運搬する際の、脚付きロボット向けのバランスシステムに関する。本発明により開発される、二脚ロボットまたは多脚ロボット向けのバランスシステムは、基本要素としてのバランス流体ポンプ(2)、バランス流体タンク(5)、バランス流体移動管(6)、およびバランス流体(7)によって特徴付けられている。ロボットのバランスは、タンク(5)間でバランス流体(7)を移動させることによって供される。 (もっと読む)
201 - 218 / 218
[ Back to top ]