
Fターム[4C097TB12]の内容
補綴 (46,288) | 義肢の動作;調節;操作 (438) | 歩行動作;屈伸動作;制御機構 (153) | 歩行動作、屈伸動作の制御、調整 (131)
Fターム[4C097TB12]の下位に属するFターム
Fターム[4C097TB12]に分類される特許
61 - 75 / 75
筋力制御装置

【課題】 重量が軽く、収納に便利で、身体に加わる負荷が自然で、制御も簡単にでき、専門家を頼らず、手軽に使用できる筋力制御装置を提供する。
【解決手段】 股関節を挟んで一方側と他方側との身体に装着される布状の一対の装着ベルト2、3と、股関節に対応する外表面に沿って配置されて一対の装着ベルト2、3を連結する布状の連結リボン4と、この連結リボン4を引出可能に巻き取ると共にその巻取動作を制御する駆動制御部5とを備えた。従って、重量が軽く、収納も便利であるほか、特に連結リボン4の巻取動作によって筋肉動作を補助することができ、これにより筋肉の収縮による身体の動作とほぼ同じ動作をするので、身体に加わる負荷が自然で、駆動制御部5の制御が簡単にでき、専門家を頼らず、手軽に使用することができる。
(もっと読む)
ヒト−外骨格システムのための外骨格制御装置

ヒト−外骨格システムのシステムパラメータを受信し、ヒト−外骨格システムの一般化座標を受信し、選択された力を補償するために外骨格アクチュエータの等価関節トルクを決定することによってヒト−外骨格システムの関節における外骨格アクチュエータを制御する技術が提供される。選択された重力及び外力の一部又は完全な補償を提供するので、本発明の一実施形態は、随意制御とアシスト制御との間の干渉の量を軽減し、それによって、ヒトが外骨格システムに素早く順応できるようになる。 (もっと読む)
短下肢装具
【課題】 下肢痙性麻痺者には、両側支柱付短下肢装具が広く用いられている。この短下肢装具は、両側の支柱により側方安定性、耐久性とも優れているが、踵接地期に足関節を底屈させない構造のため、不自然な歩行になっていた。また、デザイン面から、特に女性に敬遠されていた。
【解決手段】 靴底内部に設けた▲1▼背屈については弱い制動力または、抵抗なく可動し、立ち座り動作を制限しない、▲2▼歩行周期の踵接地期に生じる強い底屈モーメントに対しては足関節の底屈を許す、▲3▼足底全接地期以後は底屈を強く制限する本発明の機構により、軽度から高度の下肢痙性麻痺者に対して、自然に近い歩行を可能にすると同時に、足継手の機構が靴底内部にあることにより、下腿支えの形状に制限が少なく、よりデザイン性の高い短下肢装具の作製を可能にしたものである。
(もっと読む)
装着式動作補助装置及び制御用プログラム
【課題】 装着者の個人差や体調等の変動要因によらず、制御方法に応じた効果を発揮することのできる装着式動作補助装置及び制御用プログラムを提供することを解決すべき課題とする。
【解決手段】 動作補助装置10では、装着者12に装着された状態において当該装着者12固有の動力学パラメータをパラメータ同定部160により同定し、該同定した動力学パラメータを代入した運動方程式に基づき制御装置100により駆動源140を制御するように構成してあるため、装着者12の個人差や体調等の変動要因によらず、制御装置100に適用される制御方法に応じた効果を発揮することができる。
(もっと読む)
横支持脛骨プラトー(TTTP)
2つの関節面(3)と、2つの関節面支持具(1)と、横支持具(4)とから成る横支持脛骨プラトーについて記載する。この横支持頚骨プラトーは、関節面(3)が前方から膝関節に別個に導入可能なように構成される。この構成は外科手術を簡単にする一方で、腹側皮質が保存される。別々に分かれた関節面支持具(1)と関節面(3)を有する構造により、関節面支持具(1)は、まず、例えば支持ねじ(2)によって横支持具(4)上に固定することができる。或いは又、関節面支持具(1)又は関節面ユニット(321)を、腹側皮質を保存しつつ、まずは上方から斜めに埋め込み、次いで、対応する設計の横支持具(4)により側方から受容及び支持することも可能である。  (もっと読む)
(もっと読む)
歩行装置
【課題】二足歩行用ロボットに使用される歩行装置であって、大きな負荷に耐え得るだけでなく安定した歩行動作を達成し得るように構成され、しかも設計上の自由度に優れた歩行装置を提供する。
【解決手段】歩行装置は足部10と、腰部12と、該足部及び腰部の間に設けられた脚部14とを具備する。脚部14は下腿部リンク機構16と、この下腿部リンク機構16に膝関節手段22A、22B、22C、22Dを介して接続された大腿部リンク機構18とから構成され、下腿部リンク機構18は足首関節手段20A、20B、20Cを介して足部に連結され、大腿部リンク機構18が股関節手段24A、24B、24Cを介して腰部12に連結される。腰部12には直線駆動手段26A、26Bと、回転駆動手段28が保持され、この駆動手段が足部を上下方向、前後方向及び左右方向のそれぞれに選択的に駆動させるべく大腿部側駆動リンク部材に組み込まれる。
(もっと読む)
義足
歩行、ランニング、および跳躍運動を行うときの足切断者の歩行と快適性を向上させる義足(60)を開示する。義足の足と足関節(61)は、足関節を構成する連結帯を含む弾性部材として一体に形成されている。開口(62)が、弾性部材を貫通して伸びており、開口の後部が、連結帯の前面を構成する。開口の前方の弾性部材は、背屈時の停止部を形成するとともに、足関節軸周りの回転を可能にするための間隙(63)を含む。開口は、上向きに伸びて連結帯を直立した形状にし、また、連結帯は、前に突出するように湾曲している。 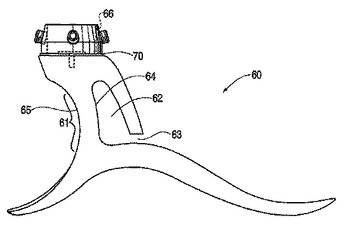 (もっと読む)
(もっと読む)
人工膝関節置換手術支援用髄内ロッド及びそれを用いた手術の支援システム
X線透過材からなる円筒体と、X線非透過材からなり、該円筒体の表面部に沿って円周方向に等間隔に配置され、軸方向に螺旋状に伸びた複数の線とを有し、前記各線は、前記円筒体の表面部に沿って前記円筒体の始端と終端とを最短距離で結ぶように構成されている。円筒体の透過像において、基準位置から一対の前記線の交差位置のまでの距離が、髄内ロッドの回旋角度量に相当する。前記交差位置をデジタイズすることで、髄内ロッドの回旋角度が測定される。 (もっと読む)
機能調整可能な義足
義足(100)は足竜骨(101)および弾性を有する腓脛部(105)を含み、腓脛部の下端が足竜骨に連結されて義足の足関節を形成する。足竜骨は、足前部、足後部、および足前部と足後部のあいだに延在する足中央部を有する。腓脛部は、前方に向けて突出した湾曲部(106)を介して足竜骨から上向きに延出し、義足の足前部と一体に形成された連結要素(107)を介して足竜骨に固締されている。腓脛部の下端は逆方向に湾曲し(110)、連結要素の逆方向に湾曲した部分(112)に収容されている。  (もっと読む)
(もっと読む)
調整可能機能を備えた義足
足部と、足首部と、シャンク部と、義足の力負荷中にエネルギーを蓄積し、力負荷解除中に該蓄積されたエネルギーを戻すことにより歩行時の義足による推進力に対して発生した動力を増加するための義足上の後部カーフ装置(169)とを備えた下肢義足のための装置。いくつかの実施形態における装置は、シャンク部の上部および義足の下部のあいだに延びた可撓性のストラップなどの少なくとも1つの細長部材(171)と、該細長部材に連結された自由端を有する少なくとも1つのコイルばね(170)を含む。前記コイルばねは、エネルギーを蓄積するためにシャンク部上端の前方移動を受けて細長部材によって拡張される。  (もっと読む)
(もっと読む)
機能調整式義足
義足(124)は足竜骨(165)および前記足竜骨に連結された腓脛部を含み、義足の足関節部を形成する。装置(125)は前記腓脛部の上端と前記義足の下部の間に連結され、前記義足の使用時に前記腓脛部の上端の後ろへの動きに力を補填し、前記腓脛部の上記上端の前への動きを制御するために使われる。前期装置(125)は歩行中の前記腓脛部の前記上端の前への動きに伴う力が負荷されたときエネルギーを蓄え、力から解放されたとき蓄えたエネルギーを戻して、運動力として歩行中に義足が発生した使用者の体への推進力が加えられるばねを有する。 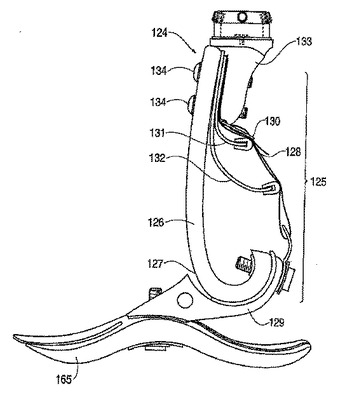 (もっと読む)
(もっと読む)
機能調整式義足
足、足関節、および足関節上部の脛部を備えた弾性を有する下肢端部用補綴装具は、人の歩行中の活発な推進段階において補綴装具に力が負荷されるときエネルギーを蓄え、歩行の後期のスタンス段階において蓄えたエネルギーを放出して人のつれて動く下肢と身体の推進を補助するための人工筋肉(190)が脛部(191)に設けられている。  (もっと読む)
(もっと読む)
動作制御式足ユニットのためのシステム及び方法
肢の動きに関連するシステム及び方法。一例では、補装具システム又は矯正具システムのようなシステムは、足ユニットと下肢部材との間の角度を積極的に制御又は調節するアクチュエータを備える。処理モジュールは、センサモジュールから得たデータをもとにアクチュエータの動きを制御する。例えば、検出するモジュールのデータは、使用者の歩行に関連する情報を含み、健常な足首の自然な動きを実質的にまねるように足ユニットを調節するために使用される。さらに、このシステムは、例えば、平地での歩行、階段の上下歩行、傾斜面の上下歩行や使用者の他の種々の動きに対応できる。更に、処理モジュールは、使用者による入力信号を受信したり外部インターフェースにより出力信号を表示してもよい。例えば、処理モジュールは、その使用者による踵の高さの入力を受信してもよい。  (もっと読む)
(もっと読む)
切断患者のための作動人工補装器
【課題】 切断患者のための作動人工補装器、例えば作動義肢を提供する。
【解決手段】 この作動義肢は、膝部材と、この膝部材上に設けられるソケット部材と、義足が装着される下端部を有する長尺の下腿部材とを有する。第1のピボットアッセンブリーは膝部材に対し下腿部材を操作自在に接続させる。第2のピボットアッセンブリーは膝部材に対しアクチュエータの上端を操作自在に接続させる。第3のピボットアッセンブリーは下腿部材の下端に対し、アクチュエータの下端を操作自在に接続させる。この義肢は前方アクチュエータ構造又は後方アクチュエータ構造として提供することができる。
 (もっと読む)
(もっと読む)
義肢の膝関節
【課題】本発明の課題は、容易に立ち上がりかつイスに安全確実に座ることができる、義肢の膝関節を提供することである。
【解決手段】この課題は、関節手段が、屈曲の際に、限定可能な角度範囲の内で、屈曲に抗して抵抗し、かつ常に自由に伸展されることができる抵抗手段を有することによって、解決される。
(もっと読む)
61 - 75 / 75
[ Back to top ]