
Fターム[4C097TB13]の内容
補綴 (46,288) | 義肢の動作;調節;操作 (438) | 歩行動作;屈伸動作;制御機構 (153) | 歩行動作、屈伸動作の制御、調整 (131) | 流体式制御 (24)
Fターム[4C097TB13]に分類される特許
1 - 20 / 24
歩行支援装置、及び歩行支援プログラム
【課題】歩行面の種類に応じた歩行支援を行う。
【解決手段】装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。装着型ロボット1は、各関節の角度を計算することができ、これら関節の角度とつま先や踵の接地の有無から、装着者が歩行する歩行面の種類を判定する。装着型ロボット1は、判定した歩行面の種類に応じて各アシストアクチュエータの力を調節することにより、平地を歩行しているのと同程度の力加減で階段や坂道を上り下りできるようにする。このように、装着型ロボット1は、各歩行シーンを判定し、歩行シーンに応じたアシスト力を与えることで歩行シーンの違いで人が出力する力を意識することなく歩けるようにする。
(もっと読む)
外骨格型ロボット

【課題】従来の外骨格型ロボットにおいては、体幹・下肢部の運動支援を適切に行えない。また、電動モータや油圧アクチュエータを用いる事例があるが、大きな負荷を発生するものは装置の自重が大きい。また、負荷を支えるだけの場面においてもアクチュエータがエネルギーを消費するために、エネルギー効率が悪い。
【解決手段】ベースと下半身とを有する外骨格型ロボットであって、左右の足首、左右の膝、および腰の左右の各位置に配置されている能動の関節である能動関節と、能動関節を動作させる制御部とを具備し、能動関節は、エアマッスルと電動モータとを具備する外骨格型ロボットにより、上記の課題が解決できる。
(もっと読む)
大腿切断患者用自動義足
切断患者の大腿連結部(100)に適用される大腿義足(P)であって、患者の大腿連結部に連結される上部ヒンジ(1)、膝の動きを再現する機能を有する関節軸(2)、大腿部に駆動可能に連結する脛骨・ふくらはぎ筋肉装置(3)およびふくらはぎ筋肉の機能をいくらか再現し、義足がブレーキをかけ、歩行の典型的な連続したスイングとスタンス段階を可能にするダンパ(5)とを備える。ダンパはシリンダ(5c)を備え、ピストン(10)およびステム(9)が互いに連結作用して、義足にかかる力に対応して、該ダンパの減衰反応をもたらす。特に、力変換器はダンパ、特にステムに設ける。マイクロプロセッサは変換器から力信号を受信し、検出された力信号に応じてダンパの反応を調整する手段を作動させる。  (もっと読む)
(もっと読む)
歩行能力についての評価方法および評価装置
【課題】少ない歩数においても歩行能力を客観的に評価することができる技術の提供。
【解決手段】マイクロコンピュータによって歩行周期を多段階に分割し、グループ化することを前提とする。義足装着者が歩行訓練をするとき、訓練が進むにつれて、時系列的に取得する歩行周期がグループを超えて変化する傾向が大である。そこで、そのような歩行周期の変化、すなわち、グループあるいはブロックの移動回数や頻度の大きさを歩行能力のための評価指標とすることができる。マイクロコンピュータ機能をもつインテリジェント義足などでは、義足自体が備えるマイコン回路およびセンサ手段などを活用して評価を行うことができる。
(もっと読む)
筋力補助装置
【課題】人体を圧迫することを防ぐとともに、人工筋の駆動力を伸展のトルクに効率的に変換することができる筋力補助装置を提供すること。
【解決手段】本発明の筋力補助装置は、人工筋80として、第1の装着具10の反関節側に一端81Aを設けた第1の人工筋80Aと、第2の装着具20の反関節側に一端81Bを設けた第2の人工筋80Bとを用い、第1の人工筋80Aの他端82Aと第2の人工筋80Bの他端82Bとをリンク部材90を介して連結し、第1の人工筋80Aの他端82Aをリンク部材90に回動及び摺動可能に設け、第2の人工筋80Bの他端82Bをリンク部材90に回動可能に設けたことを特徴とする。
(もっと読む)
人工関節装置及びその操作方法
【課題】人工膝関節用の制御が容易に可能な制動システムの提供。
【解決手段】分散し、交互に並ぶ複数のロータ220とステータ230を使用して間に形成されるギャップ内の磁気レオロジー流体を剪断する可変トルク磁気レオロジー作動人工膝210である。「剪断モード」の動作では、流体の圧力上昇または圧力変化は実質的にないか、無視できるくらい小さいため都合がよい。さらに、望ましくは、複数のMR流体ギャップまたは流束界面ではトランスミッションを使用しなくても低速で強いトルクが得られ、また動的トルク範囲が広い。一実施形態では、ロータ220および/またはステータ230間のギャップを閉じて、摩擦トルク成分を発生し、それにより、「ハイブリッド」制動システムを形成し、粘性トルクと摩擦トルクの組合せである全トルクまたはダンピングを発生させることができる。
(もっと読む)
補綴装置および真空を使った接続システム
補綴装置は、真空を使って人に接続するための接続部分と、接続部分を人に接続するのに使われる真空の量を制御する制御構造からなり、制御構造は、接続部分を人に接続するのに使われる真空の量を制御するための、接続部分と流体通信している真空ポンプ(502)と、接続部分中の真空の量を示す信号を提供するように構成された真空感知メカニズム(506)と、補綴装置の加速度と、補綴装置の向きと、補綴装置によって経験された力と、補綴装置によって経験された力の方向の少なくとも1つを示す信号を提供するように構成された動き感知メカニズム(509)と、真空感知メカニズム(506)と動き感知メカニズム(509)からの信号を受け取り、真空ポンプ(502)を制御するように構成されたコントローラと、を含む。  (もっと読む)
(もっと読む)
義足装置
【課題】大腿部から下を失った使用者に装着される義足において、使用者の歩行速度が変化した場合でも、常に最適の円滑な歩行を可能とする義足装置を提供することである。
【解決手段】使用者の大腿の断端部に装着されたソケット部1に対し下端に足部6を伴った下腿義肢部2を前方に回動させるスプリング100の付勢力を変更する付勢力変更機構を備え、この機構は流体圧により上記スプリングの初期変形量を変更してその付勢力を変更するシリンダ機構130,131と、この義足装置の使用者の歩行動作により上記シリンダ機構内に流体を送るポンプ機構44aと、このポンプ機構により上記シリンダ機構内に供給された流体を排出するとともにその排出流量を制限し使用者の歩行速度に対応した上記シリンダ機構内への流体の送り量に対応してこのシリンダ機構内の流体圧を変化させて上記スプリングの付勢力を変更する圧力調整機構140,143と、を具備している。
(もっと読む)
整形外科用の足部および整形外科用の足部を制御するための方法
【課題】従来のタイプの整形外科用の足部を、整形外科用の足部の特性への従来よりも多い要求が、踝関節を中心とした動きの制動のもっぱらパッシブな制御プロセスによって、応じられるように、制御可能に構成する。
【解決手段】センサ装置は、下腿接続部と足部10との間の角度を測定する踝角度センサ7と、垂直線に対する絶対角度センサ20と、踝関節5におけるトルクまたは踝関節5におけるトルクを発生させる力を検出するためのモーメント・センサ21とを有する。
(もっと読む)
義足の調整要否についての判定方法、ならびにそれを用いた義足および調整装置
【課題】
多段階制御の義足の調整要否を判定するに際し、経験が浅い者であっても、調整のタイミングを確実かつ適切に知る。
【解決手段】
義足装着者が満足感をもつ理想的な歩行においては、各歩行速度に対する弁開度の使用頻度は富士山型の分布を示す。義足装着者の歩行能力が変化したとき、その富士山型の分布に歪が見出される。そこで、多段階の各弁開度の使用頻度データを蓄積し、蓄積したデータを微分し、微分値による各弁開度の使用頻度情報に変換する。そして、その使用頻度情報が形作る波形に所定の値以上の歪みがあるか否かによって、調整の要否を判定する。
(もっと読む)
義足足部または足矯正器の形態のパッシブな整形外科用の補助手段
【課題】義足足部または足矯正器の形態のパッシブな整形外科用の補助手段によって、自然な足の挙動への適合を改善する。
【解決手段】制動装置は、ピストンによって互いに分離されている2つの液圧チャンバを有する複動の液圧シリンダであり、これらの液圧チャンバは、圧液の流れを逆方向にのみ可能にする2つの接続ラインによって、接続ラインの流れ抵抗は、制御によって別個におよび各々の自らの調整手段によって調整可能であり、プロセッサ装置は、センサ装置の測定されたパラメータから実際の中立点位置を確定するために設計されており、2つの接続ラインにおける流れ抵抗のための制御信号が、中立点位置に関して発生される。
(もっと読む)
整形外科用関節を制御する方法
本発明は、下肢の整形外科用関節を、少なくとも1自由度で、調整可能なアクチュエータによって、制御するための方法であって、このアクチュエータは、或る肢に取り付けるための上方の接続手段と、これらの接続手段から遠位で関節式に設けられた整形外科要素とを有する整形外科用装置を、平面歩行とは異なる歩行状況に適合させるために用いられ、方法は、以下の工程、すなわち、整形外科用装置の複数のパラメータ(A)を複数のセンサによって検出すること、検出されたパラメータを、複数のパラメータおよび/またはパラメータプロファイルに基づいて作成されかつコンピュータ・ユニットに保存された複数の基準(K)と比較すること、検出されたパラメータおよび/またはパラメータプロファイルに基づいて適切である任意の或る基準を選択すること、および、運動抵抗、可動域、駆動力および/または運動抵抗、可動域、駆動力のプロファイルを、前記選択された基準に基づいて適合させ、平面歩行とは異なる特殊機能(S)を制御すること、を有する。 (もっと読む)
補装具関節または矯正器関節
【課題】旋回運動の適切な制動を容易な方法で達成することができる補装具関節または矯正器関節を提供すること。
【解決手段】旋回ピストン(6)と押しのけ室(5)の壁部との間には、流れ横断面を規定する少なくとも1つの輪郭区域が形成されており、この輪郭区域は、選択された旋回角度に亘って、連通流路(9)および押しのけ室(5)と流体力学的に連通しており、旋回ピストン(6)の角度位置に従って、流体の流出のための異なった自由な流れ横断面を供給する。
(もっと読む)
義足
【課題】スムーズな平地歩行及び坂道や階段の下り歩行を可能にした義足を提供する。
【解決手段】膝継手部9の屈曲伸展の抵抗を調整する液圧シリンダー7が装備された義足1において、膝継手部9の下方の下腿部4と足部5との間に、足部5のつま先接地と踵接地とでそれぞれ逆向きの可動変位する緩衝装置6を設け、液圧シリンダー7に伸展通路73、屈曲通路74、屈曲通路74につま先接地閉弁76を設け、屈曲通路74Aに踵接地閉弁77を設け、つま先接地閉弁76と踵接地閉弁77とを互いに弁の開閉向きを逆向きに閉弁連結作動部材78で連動連結し、義足の足部のつま先接地と踵接地による緩衝装置6の可動変位を検知して可動変位する接地検知部材79を設け、接地検知部材79の可動変位を閉弁連結作動部材78に伝達して可動変位させる接地伝達部材78bを設けた。
(もっと読む)
足首および足の人工装具組立体
足首および足の人工装具組立体は、脛部材に対する足部材の制動された回転運動を可能にするよう構成された足首継手機構を備える。この機構は、動的可変制動抵抗、ならびに、底屈方向および背屈方向における制動抵抗の独立した変化を伴う、歩行中の足首動作の連続的な油圧制動される範囲を提供する。電子足首継手機構に連結された制御系が歩行運動の動力学的または運動学的パラメータを示すシグナルを生成するための少なくとも1つのセンサを含み、この機構および制御系は、足首の可動範囲にわたって有効な制動抵抗がこのようなシグナルに応じて自動的に適応されるよう配置されている。独立した踵高調整を可能とする構造を備えた一段および二段ピストン油圧制動構造が開示されている。  (もっと読む)
(もっと読む)
人工足首継手機構
セルフアライメント足・足首人工装具アセンブリは、足部材(10)を回転可能に取り付けた足首ユニット(16)を有する。足首ユニットは、シリンダ(26)内を直線移動可能なピストン(28)を有する油圧ピストン・シリンダアセンブリを含む。シリンダの軸は、足首ユニットの脛部接続インタフェース(20)により画定される脛軸と一致している。制動抵抗制御弁を含む迂回路(36)により足首継手の背底屈が連続的に油圧制動され、上記ユニットは制動運動範囲の大部分にわたり足背方向と足底方向のいずれにも弾性付勢されない。これにより、立位安定化、バランス制御、階段および傾斜歩行の改善などの利点が得られる。 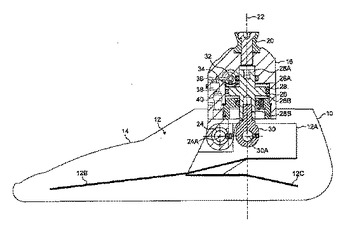 (もっと読む)
(もっと読む)
腰部支援装置
【課題】上半身の自然な屈伸動作を阻むことなく、腰部の負担を軽減できるようにする。
【解決手段】上半身装着具2と、左右一対の大腿部装着具3と、上半身装着具2の左右両側位置と各大腿部装着具3の左右方向の外側位置とを繋ぐ左右一対の荷重伝達装置4とから腰部支援装置1を形成する。荷重伝達装置4は、前後方向に屈伸できる関節部5a,5b,5cを上下方向所要間隔で複数備え、各関節部5a,5b,5cに、屈曲状態を伸ばす方向へ力を付与する空気圧アクチュエータ6a,6b,6cを個別に備える。装着者7が上半身を屈めるときに、一緒に屈曲させられる各荷重伝達部材4を、各装着具2と3の間で突っ張るように作用させることで、装着者7の腰部に作用する荷重の一部を、上半身装着具2と荷重伝達装置4を介して大腿部装着具3を装着してある装着者7の大腿部で支持させる。
(もっと読む)
人工股関節
本発明は、取付手段に取り付けるためのおよび義足のための接続手段(21,31)を有する人工股関節(1)に関する。更に、股関節での伸展運動および歩幅を制御するための制御ユニット(6)が設けられている。制御ユニットによって、立脚相での伸展運動および義足の歩幅を、例えば液圧式の制御装置によって制御することが可能である。 (もっと読む)
義足足部
下腿部分のための接続部分(1)と、前足部分(6)とを有する義足足部であって、この前足部分は、接続部分(1)の角度位置が前足部分(6)の角度位置を制御するように、上側の連結要素(3)および下側の連結要素(8)によって接続部分と関節結合されており、これらの連結要素(3,8)のうちの一方が、足部の踵領域まで延びている。重量を足にかけるとき、足部の有効長が変化することを回避する。下側の連結要素(8)は、踵領域まで延びている。 (もっと読む)
筋力補助装置
【課題】小型かつ軽量であるので利用者の動作範囲を限定せず、かつ、リンク機構を用いずに力の伝達を行え、利用者の屈曲運動に対して可動範囲を邪魔せず、装着性、および、安全性の高い筋力補助装置を提供する。
【解決手段】上記課題を解決するため本発明の筋力補助装置は、利用者の人体を囲む外骨格と前記外骨格を利用者の人体に装着せしめる衣服部と前記外骨格を動作せしめるアクチュエータと前記アクチュエータを動作せしめる駆動源と前記駆動源を制御する機器を備えた筋力補助装置であるので、コンパクトに全身に装着することが可能な装具であり、装着性を向上させることが可能であり、利用者の屈曲運動に対して、その範囲に前記アクチュエータ等をはさまないので、可動範囲を邪魔しない。
(もっと読む)
1 - 20 / 24
[ Back to top ]