
Fターム[5C122EA66]の内容
Fターム[5C122EA66]に分類される特許
1 - 20 / 1,043
画像処理を利用した遠隔制御システム
複数の移動対象物の追跡撮影システム及び撮影制御方法
撮像機器
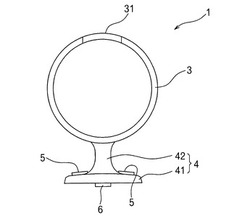
【課題】他の機器と接続して使用することが可能な撮像機器であって、他の機器との関係によって複数の使用形態をとることが出来ると共に、使用形態に応じて動作モードを自動的に切り換えることが出来る撮像機器を提供する。
【解決手段】本発明に係る撮像機器1は、撮像機能を有する本体部3、前記本体部3から突出する支柱部42、前記支柱部42の先端部に設けられたベース部41、前記ベース部41の表面に設けられた第1センサー5、前記ベース部41の裏面に設けられた第2センサー6、及び撮像機器の状態に応じて動作モードを切り換える制御部を具え、該制御部は、第1センサー5が物体の当接を検知したことに応答して供給される第1検知信号、及び第2センサー6が物体の当接を検知したことに応答して供給される第2検知信号の供給状態に応じて動作モードを切り換える。
(もっと読む)
撮像装置、撮像装置の制御方法、プログラム

【課題】単体では2次元画像の撮影を行う撮像装置を複数台利用し、3次元画像の撮影を簡単に行えるようにする。
【解決手段】撮像装置は3次元画像を撮像するための撮像パラメータの情報を他の撮像装置と共有する手段を有し、前記他の撮像装置と無線接続している際に、ユーザから撮像指示があった場合には、前記他の撮像装置と共有した前記撮像パラメータを用いて、前記他の撮像装置と共に3次元画像を生成するための撮像を行い、前記他の撮像装置と無線接続していない際に、ユーザから撮像指示があった場合には、2次元画像を生成するための撮像を行う。
(もっと読む)
立体映像撮影システム
【課題】 フォーカスと連動して輻輳角が動作する立体映像撮撮影システムにおいて、フォーカスと輻輳角を、必要に応じて連動と非連動に切換える立体映像撮影システムを提供すること。
【解決手段】 立体映像撮影システムは、一対のレンズ装置と、該一対のレンズ装置による被写体像を撮像するカメラ装置と、該一対のレンズ装置の輻輳角を変更する輻輳角変更手段と、該一対のレンズ装置のフォーカス群の動作に連動して、該一対のレンズ装置の輻輳角を制御する制御手段と、該輻輳角をフォーカス群の動作に連動させる連動状態と連動させない非連動状態とで切換える連動切換手段と、を有する。
(もっと読む)
撮影視野屈折鏡付き撮影スタンドおよび撮影画像形状補正機能
【課題】情報表示画面付き撮影デバイスの使用者の視野の向きと撮影の向きとが異なる向きにすることができる機構を備えた撮影スタンドおよび撮影画像形状補正機能を提供する。
【解決手段】情報表示画面を使用者から見える位置に保つことで撮影デバイス6上でなんらかのアプリケーションプログラムを実行させる場合にその実行中の画面を使用者が確認することができるようになる利便性と、撮影スタンドを組み立て式とすることでコンパクトに持ち運び、必要に応じて即座に組み立てて使用することができる携帯性とを提供する。撮影スタンドを撮影視野屈折用の鏡1を貼り付けた板状のパーツにて構成し、屈折によって台形型に歪む視界はデバイス6上で画像補正することによって補正する。
(もっと読む)
地図表示装置、及び地図表示方法
【課題】撮影画像に関する情報を、ユーザが把握しやすい形で提示することのできる地図表示装置及び地図表示方法を提供する。
【解決手段】
画像に対応する位置情報と、該画像の対象物の位置情報とを含む画像情報を受信する画像取得部401と、受信した画像情報に基づき、画像に対応する位置及び該画像の対象物の位置を地図上に示す地図表示制御部407dとを備える。
(もっと読む)
カメラシステム
【課題】 多数のカメラを設置すること無く、かつ、死角を生じることがない、操作性に優れたカメラシステムを提供する。
【解決手段】 被写体103との距離である被写体距離を検出する被写体距離検出手段を備えたカメラ101と、カメラの撮影方向を変更可能な撮影方向変更手段と、カメラを移動させる移動手段と、移動手段により移動した移動距離を検出する移動距離検出手段と、被写体距離と移動距離により、カメラと被写体との角度を算出し、前記角度を元に撮影方向変更手段によりカメラの撮影方向を変更する制御手段とを有する。
(もっと読む)
カメラモジュール及びその画像補正方法
【課題】2次元映像または3次元立体映像を獲得するために、2つのカメラで撮影された映像が一致するように補正できるカメラモジュールを提供する。
【解決手段】OIS(Optical Image Stabilization)部を備えているメインカメラ及びサブカメラのそれぞれで映像を撮影する段階と、メインカメラで撮影された映像から特定物体の第1映像を抽出し、サブカメラで撮影された映像から特定物体の第2映像を抽出する段階と、メインカメラのOIS部を駆動させて、第1映像が第2映像に一致するように補正する段階と、を含む。
(もっと読む)
撮像装置
【課題】 コストダウンと小型化とを図る上で有利であるとともに、撮像部の撮影方向を変更する速度に依存することなく且つ様々なタイミングで、本体内を冷却することができる撮像装置を提供することができる。
【解決手段】 レンズユニット104および撮像素子105により被写体を撮像する撮像装置であって、レンズユニット104の撮影方向を変更するチルト軸120と、チルト軸120を駆動させるための動力源と同一の動力源であるチルトモータ125により駆動され、カメラ本体101内の気体を循環させるチルトファン124と、チルトモータ125により、チルト軸120およびチルトファン124を選択的に駆動させるためのチルトソレノイドアクチュエータ201と、を有することを特徴とする。
(もっと読む)
撮像装置、撮像装置の制御方法及びプログラム
【課題】撮影方向の設定を短時間に行うことができるようにする。
【解決手段】キャプチャされた画像データの輝度値を評価する処理を実行し、最も輝度値が高い画素位置、つまり画像中の最も明るい領域が画面の中央に位置するかどうかをチェックする。このチェックの結果、画面の中央ではない場合は、撮影された画像内で最も明るい領域(輝度値が高い画素位置)が画面の中央位置に来るようにカメラの撮影方向を変更する処理を実行し、画像中の最も明るい領域が画面の中央に位置するまで、撮像処理、輝度値の評価、及び撮影方向の変更を繰り返す。
(もっと読む)
携帯端末、撮影制御プログラムおよび撮影制御方法
【構成】携帯電話機10は、カメラモジュール40などを備え、カメラ機能を実行できる。カメラ機能が実行されると、ディスプレイ30には、スルー画像と共に撮影キー(64)およびロックキー(66)が表示される。ロックキーが操作されると、カメラモジュール40の光軸と対応する端末方向が、撮影方向として記憶される。そして、使用者は、撮影キーを操作して、端末方向を変化させた後に、撮影方向と端末方向とを一致させれば、画像を撮影することができる。
【効果】使用者は、端末方向を予め記憶させた撮影方向に向けるだけで、撮影を行うことができる。そのため、撮影するときの利便性が向上する。
(もっと読む)
カメラシステム、カメラ装置、カメラシステムの制御方法、制御装置の制御プログラム、及びカメラ装置の制御プログラム
【課題】電力供給が開始された時に状況に応じて原点検出処理を適切に省略できるカメラシステム、カメラ装置、カメラシステムの制御方法、制御装置の制御プログラム、及びカメラ装置の制御プログラムを提供する。
【解決手段】カメラシステムは、カメラ装置1とテレビ会議端末2を備えている。テレビ会議端末2は、カメラ装置1に給電可能に制御する。カメラ装置1がテレビ会議端末2に接続された時に、テレビ会議端末2は、類似度を算出する。類似度は、現在静止画データと、遮断直前静止画データとに基づいて算出される。テレビ会議端末2は、類似度が閾値以上の場合、カメラ装置1の撮像方向は変化していないと判断する。この場合、カメラ装置1において、原点検出処理の実行を省略することができる。
(もっと読む)
撮像装置およびその制御方法
【課題】 赤道儀などの機材を使用することなく、撮像装置を固定した状態で天体の追尾撮影を容易に行う。
【解決手段】 地球上での高度を含む座標を取得し(S301)、光軸が向いている方角、仰角、および光軸を中心とした回転方向の傾きを含めた姿勢を取得し(S302)、取得された座標と、取得された姿勢から、画角内の天体の移動方向および移動速度を演算し(S304)、演算により求められた天体の移動方向および移動速度に基づいて被写体の光学像を結像するためのレンズ群の一部を動かすことにより光軸の方向を変化させて天体の追尾を行う(S308)。
(もっと読む)
画像処理装置、画像処理システム、画像処理方法、ならびに、プログラム
【課題】複数のプレイヤーが1つの画面を共有しつつ、プレイヤーの意向に添った画面も閲覧できるようにする。
【解決手段】画像処理装置400において、決定部407は全体画像内の第1領域の位置と第2領域の位置を決定する。第1抽出部401は全体画像内の第1領域を第1画像として抽出し、第2抽出部402は全体画像内の第2領域を第2画像として抽出する。第1表示部403は第1画像を第1ディスプレイに表示する。第2表示部404は第2画像を第2ディスプレイに表示する。撮影部405は第2ディスプレイの背面方向を撮影する。推定部406は撮影画像に映っている第1画像に対応する部分と全体画像とに基づいて第1ディスプレイに対する第2ディスプレイの相対的な位置を推定する。また、決定部407は第1領域の位置と推定された相対的な位置とに基づいて第2領域の位置を決定する。
(もっと読む)
撮像装置、撮像装置の制御方法および撮像システム
【課題】 被写体追従と像振れ補正が両立した撮影を可能にする。
【解決手段】 撮像装置100の撮影条件の設定を補助するサーバーコンピュータにネットワークを介して接続され、サーバーコンピュータから被写体移動速度情報を受信することが可能な情報受信手段260と、像振れを補正する振れ補正機構を備えた撮像装置の振れを検出する振れ検出手段130と、情報受信手段により受信された被写体移動速度情報に基づいて撮像装置の被写体追従判定閾値を計算する閾値計算手段109と、振れ検出手段により検出された被写体移動方向の振れが被写体追従判定閾値より大きい場合には、振れ補正機構に被写体移動方向の振れ補正を行わせない制御手段109とを有する。
(もっと読む)
撮像ガイド装置、撮像装置、撮像ガイド方法、プログラム
【課題】同一地点での同一視野の撮像が的確に実行できるようにユーザをガイドする装置の実現。
【解決手段】例えば最初の撮像時に、記録画像に関連づけられた情報として、記録画像内で設定されたターゲット画像の画像内容を示すターゲット画像データ、及び記録画像を表示した際のターゲット画像の表示上の位置を示す表示位置情報を含むターゲット情報を記憶する。同一地点での撮像時には、現在の撮像画像データとして入力される被写体モニタリング画像と、上記表示位置情報に基づくマーカー表示と、被写体モニタリング画像におけるターゲット画像データに該当する画像部分がターゲット画像であることを提示するターゲット表示とを含む撮像視野誘導表示を行う。マーカー表示とターゲット表示によって過去の撮像と同一視野となるようにユーザを誘導する。
(もっと読む)
自分撮り判断装置、撮像装置、プログラム及び自分撮り判断方法
【課題】簡易かつ高精度に自分撮りを判断することができる。
【解決手段】撮像素子によって撮像された画像から顔領域を検出する顔領域検出手段(S109、S111)と、検出された顔領域の左下領域および右下領域の少なくとも一方の合焦状態を検出する合焦状態検出手段(S117)と、合焦状態検出手段によって検出された左下領域および右下領域の少なくとも一方の合焦状態が予め定められたレベルより低い場合に、自分撮りと判断する判断手段と、を備えた。
(もっと読む)
対象物識別方法と装置
【課題】対象物が太陽に直接照らされていても、対象物が遠くに位置していても、対象物を撮像して得た画像において、対象物の位置を識別できるようにする。
【解決手段】第1の波長域の光を吸収し、かつ、第2の波長域の光を反射する光学特性部3を、対象物1に取り付ける。第1の波長域の光を第1撮像部5aに入射させ、かつ、第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収する第1光学系6と、第2の波長域の光を第2撮像部5bに入射させる第2光学系8と、を用意する。第1撮像部5aにより、第1光学系6を介して、対象物1を含む領域を撮像して第1画像を生成するとともに、第2撮像部5bにより、第2光学系8を介して、対象物1を含む領域を撮像して第2画像を生成する。第1画像の各画素の輝度Aと、対応する第2画像の画素の輝度Bとの比率B/Aを求め、この比率に基づいて、光学特性部3の位置を特定する。
(もっと読む)
撮像装置、画像処理方法及びプログラム
【課題】角画像を生成する際における撮像のやり直しが発生する可能性を低減できる撮像装置、画像処理方法及びプログラムを提供すること。
【解決手段】広角撮像モード中にユーザがデジタルカメラ1を移動させると、撮像画像制御部113Aは、当該移動に併せて現在撮像中の撮像画像を表示部19に移動表示し、ルート制御部113Bは、この撮像画像の移動に追従させてルートを撮像方向と直交する方向に移動して表示部19に表示する。このとき、報知部115は、デジタルカメラ1の撮像方向と直交する方向の移動量が不適切である場合には、ユーザに対してその旨を報知する。
(もっと読む)
1 - 20 / 1,043
[ Back to top ]