
Fターム[5H115PG05]の内容
車両の電気的な推進・制動 (204,712) | 車両の種類 (12,614) | 電気自動車(ハイブリッド車を含む) (11,291) | フォークリフト (87)
Fターム[5H115PG05]に分類される特許
21 - 40 / 87
製造方法および車両
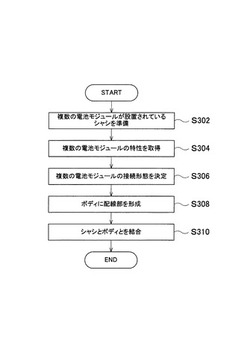
【課題】電気自動車に用いられる電池パックを有効に利用すること。
【解決手段】車両の製造方法は、シャシ準備工程と、配線部形成工程と、電池モジュール接続工程とを備える。シャシ準備工程では、複数の電池モジュールが設置されている車両のシャシを準備する。配線部形成工程では、車両のボディに配線部を形成する。電池モジュール接続工程では、シャシとボディとを結合することで、配線部により複数の電池モジュールを電気的に接続する。
(もっと読む)
作業用車輌

【解決手段】有人/無人切換スイッチ手段が無人運転に切換えられ(ST01)、無人検出手段からの無人情報を得る(ST02)と共に、自動運転起動スイッチ手段がオンになる(ST03)という、3つの条件が満たされたときに無人運転が開始される(ST04)。
【効果】自動運転起動スイッチ手段は、ステップから下りた運転者によって操作される。そのため、運転者がステップに乗っているときに、無人運転が起動される心配はない。
また、無人運転中に、何らかの理由で運転者がステップに乗った場合には、条件の1つが欠落するため、車体は停止される。
(もっと読む)
ハイブリッド型フォークリフトの制御システム
【課題】ハイブリッド型フォークリフトにおける制御を簡素化することができるハイブリッド型フォークリフトの制御システムを提供する。
【解決手段】ハイブリッド型フォークリフトには、全体を統合制御するとともにLECU52が備える演算処理機能を搭載したHVECU53が設けられている。HVECU53は、LECU52と通信可能となっており、リフトレバー34又はティルトレバー35からLECU52へ入力される入力情報がLECU52からHVECU53へバイパスされるようになっている。HVECU53とLECU52との間が通信不能な状態においては、LECU52が荷役モータ43への指令値、及び荷役バルブ23の開閉指令値を演算するとともに、荷役モータ43における回転数の指令値をLMECU51へ出力するフェールセーフ処理へ移行する。
(もっと読む)
直流電源の制御方法および前記直流電源の制御方法を用いた移動車両
【課題】バッテリーとキャパシタとを組み合わせた電源全体での損失を最小にした直流電源の制御方法を提供する。
【解決手段】キャパシタCとその電圧を昇降圧するためのチョッパ回路chとを有する回生電流蓄積部RAをバッテリーBに並列接続した直流電源の制御方法において、電流指令値算出部10により、バッテリー内部抵抗RBと、回生電流蓄積部の等価抵抗値RXと、直流電源電流値IDCと、から前記チョッパ回路chに流すアシスト電流指令値IL*を算出し、減算部24において、前記アシスト電流指令値IL*と前記チョッパ回路chに流れるアシスト電流値ILとの差演算を実行し、PWM制御部26において、この差信号に応じたゲート信号を生成してチョッパ回路chを制御する。
(もっと読む)
直流電源の制御方法および前記直流電源の制御方法を用いた移動車両
【課題】直流電源の制御方法において、バッテリーとキャパシタとを組み合わせた電源全体での損失を低減させる。
【解決手段】キャパシタCとそのキャパシタCの充放電を制御する電気回路とを有する回生電流蓄積部RAをバッテリーBに並列接続した直流電源の制御方法において、電流指令演算部2において、微分手段1によりバッテリー電圧VBを微分した微分成分と、キャパシタ容量の期待値CSと、を乗算してアシスト電流指令値IL*を算出し、ローパスフィルタにおいて、前記アシスト電流指令値IL*からバッテリ電流VBとアシスト電流ILとの分担比率を調整した補正アシスト電流指令値IL_LPF*を導出し、その補正アシスト電流指令値IL_LPF*に基づいて前記電気回路を制御する。
(もっと読む)
直流電源のチョッパ制御方法および前記直流電源のチョッパ制御方法を用いた移動車両
【課題】直流電源のチョッパ制御回路において、バッテリー電流が急変しないように制御する。
【解決手段】キャパシタCとその電圧を昇圧するためのチョッパ回路chとを有する回生電流蓄積部RAをバッテリーBに並列接続した直流電源において、第1減算部36において前記チョッパ回路chに流すアシスト電流指令値IL*と前記チョッパ回路chに流れるアシスト電流値ILとの差演算を実行して第1差信号を算出し、PWM制御部38においてこの第1差信号に応じたゲート信号を生成してチョッパ回路chを制御するチョッパ制御方法であって、キャパシタ電圧VBがキャパシタ定格電圧VEDLC_maxよりも低い時に、前記アシスト電流指令値IL*または第1差信号に制限を掛け、前記チョッパ回路chのゲート信号を調整する。
(もっと読む)
産業車両のピッチング抑制装置
【課題】積荷の状態によらずピッチングを抑制することができるとともにアクセル操作に対する応答性を確保することができる産業車両のピッチング抑制装置を提供する。
【解決手段】モータ回転数センサ27は走行モータ15の出力軸の回転速度に応じた信号を出力する。モータ制御部26はアクセルペダル13の操作量に応じた走行速度にすべく走行モータ15を制御する。ピッチング周波数推定部24は、積荷の重さと高さ位置とティルト角に基づいてピッチング周波数fpを推定し、ピッチング検出部25およびモータ制御部26は、モータ回転数センサ27からの回転速度に応じた信号中の推定ピッチング周波数成分を抽出して、当該ピッチング周波数成分の大きさを小さくするように走行モータ15を制御する。
(もっと読む)
車両
【課題】燃料電池搭載の車両の燃料の残量が少なくなった場合に運転者に燃料補給を適切に促すことができるようにする。
【解決手段】ユニットコントローラ44は、電圧計42によって得られたキャパシタ電圧検出情報と、電流計43によって得られた電流検出情報とに基づいて、平均電力を算出する。ユニットコントローラ44は、算出した平均電力と、圧力計381によって得られた水素残圧検出情報とに基づいて、水素タンク38に残る水素によって今後フォークリフト11が稼働可能な残り時間を算出する。算出された残り時間が基準時間に満たない場合、且つフォークリフト11が無負荷状態である場合、ユニットコントローラ44は、非常発電制御を行なう。非常発電制御は、キャパシタ40の電圧維持レベルを低減して、燃料電池システム37を発電させる制御である。
(もっと読む)
ハイブリッド車両
【課題】車両の走行状態に拘わらず電動発電機を制御することができ、効率よく発電を行うことができること。
【解決手段】フォークリフトでは、エンジン17、モータジェネレータ19、IVT38、ディファレンシャルギア39が直列に連結された状態で設けられている。フォークリフトは、エンジン17、モータジェネレータ19、IVT38を制御する車両制御装置37を搭載している。エンジン17は、その出力軸17aがモータジェネレータ19の回転軸40と連動回転可能に連結されている。また、IVT38は、その入力軸38aがモータジェネレータ19の回転軸40と連動回転可能に連結され、その出力軸38bは駆動輪13と連動回転可能にディファレンシャルギア39に連結されている。車両制御装置37は、フォークリフトの走行時及び停止時に、IVT38の変速比を制御してモータジェネレータ19を所望の状態に制御する。
(もっと読む)
ハイブリッド型産業車両のインチングペダルシステム
【課題】ハイブリッド型フォークリフトにおいて、半クラッチ状態にして低速・高トルク走行を実現する。
【解決手段】エンジンと電動モータ2の駆動力により駆動輪が回転駆動するハイブリッド型フォークリフトに、インチングペダル33を備えた。低速走行時にアクセルペダル31を踏みながらインチングペダル33を踏み込んでいくと、コントローラ100は、インチングペダル33の踏み込みに合わせてクラッチを接続状態から半クラッチ状態に移行し低速高トルク走行を可能とし、更に踏み込むとインバータ5により走行用電動モータ2の駆動力を弱め、更に踏み込むとインバータ5により走行用電動モータ2により制動回生をさせ、更に踏み込むとブレーキペダル32が機械的に押し下げられて機械式ブレーキが作動する。高速走行時にアクセルペダル31を踏みながらインチングペダル33を踏んでも、エンジン回転数をアイドリング回転数に保持して燃費悪化を抑制する。
(もっと読む)
モータ装置並びにこれを搭載した車両又はアクチュエータ
【課題】2つのモータを軸心を一致させて組み込むことを容易にする。
【解決手段】モータハウジング41a、41bと、これらのモータハウジング41a、41bの端部に取着されるフロントカバー部42a、42b及びエンドカバー部43a、43bと、これらのカバー部42a、42b、43a、43bに設けられてモータ軸46を支持するベアリング44a、44b、45a、45bとを具備する一対のモータMa、Mbを、エンドカバー部43a、43b同士を重合させた背合わせの状態に配置して、各モータハウジング41a、41bから突出したモータ軸46a、46bの端部を出力端として使用するように構成する。そして、一対のエンドカバー部43a、43bを共通の部材に一体的に作り込んで接続体15を構成し、この接続体15に、各々のエンドカバー部43a、43bが備えるべきベアリング45a、45bを一体的に設けることとした。
(もっと読む)
リーチ型フォークリフトにおける駆動輪のトラクション制御方法およびそのシステム
【課題】スリップし易い床面であっても安定した速度で走行することができる、リーチ型フォークリフトの駆動輪のトラクション制御方法およびシステムを提供する。
【解決手段】検出器3が検出した駆動輪2の回転速度と、検出器5L,5Rが検出した従動輪4L,4Rの回転速度を用いて算出された駆動輪2の理論回転速度との差をとり、スリップ量を得る算出器81と;スリップ量から所定の許容スリップ量を差し引いて比例積分演算し、その値を駆動輪2の最大回転速度から差し引いて、スリップが防止され得る目標回転速度を得る演算器82と;目標回転速度と駆動輪2の回転速度との差を比例積分演算して、第1の目標トルクを得る演算器83と;アクセル角度に応じた指示回転速度と駆動輪2の回転速度との差を比例積分演算して、第2の目標トルクを得る演算器85と;両目標トルクを比較し、値の小さい方を駆動輪2に対する指示トルクとする比較器86と;を含むようにした。
(もっと読む)
電動機の制御装置
【課題】電動機を安定して制御することができ、インバータ等を構成する素子の損傷を防ぐことができ、さらにバッテリの長寿命化及び損失の低減による高効率化も可能な制御装置を提供する。
【解決手段】本発明に係る制御装置1Aは、インバータ部3と、インバータ部3の電源ライン−接地ライン間に接続されたキャパシタCapと、第1スイッチSW1、第2スイッチSW2、及び第1及び第2スイッチSW1、SW2の接続点に一端が接続されたコイル素子Lを有する昇圧部6Aと、コイル素子Lの他端と接地ラインとの間に接続されたバッテリ2とを備え、電動機4の停止時に、バッテリ電圧が昇圧部6Aによって昇圧され、電源ライン−接地ライン間の直流電圧が所定のインバータ目標電圧にまで昇圧される。
(もっと読む)
ハイブリッド産業車両
【課題】水浸入防止措置を簡素化したままバッテリの被水を抑制できるとともに、エンジン等の熱源によるバッテリの雰囲気温度上昇を回避することができるハイブリッド産業車両を提供する。
【解決手段】ハイブリッドフォークリフト11の車体12は、車体フレームFと、カウンタウェイトWとから構成されている。車体12内には、エンジン28、クラッチ29、モータジェネレータ30、走行用モータ26及び油圧ポンプ31が装備されている。そして、油圧ポンプ31は、エンジン28とモータジェネレータ30とで駆動されるように構成されている。走行用モータ26は、カウンタウェイトWに形成された収容凹部35に載置されているバッテリ36から電力が供給されて駆動するように構成されている。そして、バッテリ36は、カウンタウェイトWの中心Pよりも上方に位置している。
(もっと読む)
ハイブリッド建設機械の制御装置
【課題】 ブームシリンダBCの排出エネルギーを効率よく利用する。
【解決手段】コントローラCは、ブーム用の操作弁14に備えた上記センサー14aの出力信号を受信して、ブーム用の操作弁14の操作方向および操作量を判定する機能と、それら操作方向および操作量に応じて上記比例電磁弁34の開度を制御するとともに傾角制御器35,36を介してサブポンプSPおよびアシストモータAMの傾転角を制御する機能とを備え、上記アシストモータAMの出力で、サブポンプSPおよび電動モータMGの出力をアシストする構成にしている。
(もっと読む)
燃料電池型産業車両
【課題】鉛バッテリと置き換えて燃料電池ユニットを搭載した燃料電池型産業車両において、低電圧による動作の規制が実行されることを回避すること。
【解決手段】フォークリフトに搭載された鉛バッテリの電圧が閾値電圧に達していない場合に、フォークリフトの動作の制限を実行する車両コントローラ26を装備したフォークリフトにおいて、鉛バッテリと置き換えて燃料電池ユニットFUを搭載することで燃料電池式のフォークリフトとされている。燃料電池ユニットFUには、燃料電池システム27が発電した電力を充電可能なキャパシタ31と、双方向昇降圧DC/DCコンバータ35が備えられている。双方向昇降圧DC/DCコンバータ35は、キャパシタの電圧が、閾値電圧以上に設定された目標電圧より低い場合は昇圧し、高い場合は降圧して、フォークリフトの走行用モータ13c等に供給するように燃料電池ユニットコントローラ25により制御される。
(もっと読む)
車両用電動モータ駆動制御装置
【課題】車両用電動モータ駆動制御装置において、簡単な構造・小型・低コストでフライバックエネルギーを適切に分散及び吸収して、スイッチング素子が破壊されるのを抑制する。ひいては、駆動可能な時間を延ばすことができるようにする。
【解決手段】車両用電動モータ駆動制御装置は、直流電源BATと電動モータ30に直列に接続され、電動モータ30への給電・停止を切り替える第1スイッチング部74aと、第1スイッチング部74aのドレイン−ゲート間に配置されクランプ電圧を第1クランプ電圧と該第1クランプ電圧より大きい値である第2クランプ電圧とに切替可能な切替回路75とから構成される電動モータ駆動素子73と、電動モータ駆動素子73に並列に接続され、第1クランプ電圧と第2クランプ電圧との間の値である第3クランプ電圧にクランプするクランプ素子80と、を備えている。
(もっと読む)
燃料電池型産業車両
【課題】鉛バッテリと置き換えて燃料電池ユニットを搭載した燃料電池型産業車両において、低電圧による動作の規制が実行されることを回避すること。
【解決手段】駆動源としてフォークリフトに搭載された鉛バッテリの電圧が閾値電圧に達していない場合に、フォークリフトの動作の制限を実行する車両コントローラ26を装備したフォークリフトにおいて、鉛バッテリと置き換えて燃料電池ユニットFUを搭載することで燃料電池式のフォークリフトとされている。燃料電池ユニットFUには、フォークリフトに対して電力供給が可能なキャパシタ31と、該キャパシタ31の電圧を検出する電圧センサ32が備えられている。そして、燃料電池ユニットFUに搭載された燃料電池ユニットコントローラ25は、電圧センサ32が検出するキャパシタ電圧が閾値電圧に達している場合に、車両コントローラ26に車両の制御を開始させるように構成されている。
(もっと読む)
作業用車両の制御方法および作業用車両
【課題】バッテリへの充電量を適切に設定することができる作業用車両の制御方法および作業用車両を提供する。
【解決手段】バッテリに充電される電流、および、バッテリから放電される電流を積算してバッテリの充電率を推定する推定ステップS1と、推定された充電率に基づいて、バッテリの充電量を決定する充電量決定ステップS3と、モータが決定された充電量を発電するために必要な充電動力を、エンジンが供給する動力の補正量として決定する補正量決定ステップS5と、走行および荷役の状態から決定されたエンジンの供給動力に、充電動力を加算する加算ステップS6と、を有することを特徴とする。
(もっと読む)
移動車用電源装置
【課題】移動車両電源装置の回生電力を吸収する手段として、電力変換部と並列に電気二重層キャパシタを接続すると、バッテリーに比してキャパシタの抵抗が大きいことから、バッテリー電流のピーク値が大きくなりバッテリーの寿命に悪影響を与えている。
【解決手段】バッテリー電圧を検出して微分する。この微分信号と電気二重層キャパシタに対する所望キャパシタ電流実現のための係数との乗算を行って電流指令を生成する。この電流指令とチョッパーを流れる検出電流との差信号を求め、この差信号に応じたゲート信号にてチョッパーを制御することで、電気二重層キャパシタ容量を小くし、大容量のキャパシタを接続したと等価な制御を可能とした。
(もっと読む)
21 - 40 / 87
[ Back to top ]