
Fターム[5J021HA03]の内容
可変指向性アンテナ、アンテナ配列 (29,192) | アンテナ装置の応用 (4,110) | 追尾 (117)
Fターム[5J021HA03]に分類される特許
1 - 20 / 117
無線タグリーダおよび監視システム
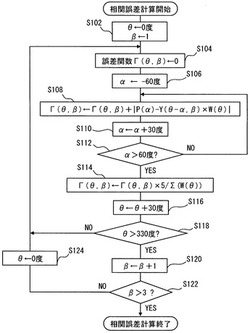
【課題】無線タグの方向探知精度がよい無線タグリーダを提供する。
【解決手段】無線タグ400の各タグアンテナ412、414、416からの電波から電力強度パターンと参照パターンとの相関誤差をそれぞれ算出する(S108)。参照パターンは、理想的な環境で、アンテナ部1が指向性を順次切り替えたときに垂直偏波を受信した場合の電力強度パターンである。よって、この参照パターンと各タグアンテナ412、414、416から受信した電波の受信電力強度パターンとの相関誤差Γは、受信した電波が水平偏波を主とする場合に大きな値となる。この相関誤差Γが最小となる電力強度パターンを方向推定用のパターンとして選択しているので、選択したパターンは垂直偏波を主とする電波を受信したときのパターンである可能性が高い。よって、高い精度で無線タグ400の方向探知を行なうことができる。
(もっと読む)
太陽光発電衛星システム及び放射位相設定方法

【課題】送受両用の機能を有するアンテナ素子を用いることなく、送電用アレーアンテナを構成して、製造コスト、輸送コスト、維持コストなどを低減することができるようにする。
【解決手段】位相合成器34−nが、送電用アンテナ素子31−nと組となるパイロット信号受信用アンテナ素子32a−n,32b−nにおけるパイロット信号の受信位相φa−n(r),φb−n(r)を抽出して、その受信位相φa−n(r),φb−n(r)を合成し、その合成位相φn(t)から送電用アンテナ素子31−nの放射位相φn*(t)を導出し、移相器35−nが、マイクロ波変換部3から出力された電力マイクロ波に対して放射位相φn*(t)を与える。
(もっと読む)
捕捉追尾制御装置
【課題】粗駆動機構と精駆動機構との2種の駆動機構の協調制御を行うことにより目標に対して高速高精度に捕捉追尾を行なうことができ、小型軽量化を図れる捕捉追尾制御装置を提供する。
【解決手段】捕捉追尾制御装置10は、移動体の光通信等における光アンテナの指向角制御において、粗駆動機構21および精駆動機構15の2つの駆動機構を有する。
(もっと読む)
衛星搭載用マイクロ波送信装置、該装置を用いる目標地域の追尾方法、及び制御プログラム
【課題】地球周回型の小型衛星に搭載することができて、かつ指向方向を連続して可変にできるようにする。
【解決手段】第1のアンテナホーン3aが、パラボラアンテナ4を介して、人工衛星の移動に伴って指向方向を矢印a,bのように変化させながら地球上の目標地域に第1のマイクロ波S5aを照射させる。第2のアンテナホーン3bは、第1のアンテナホーン3aがパラボラアンテナ4を介して目標地域に第1のマイクロ波S5aを照射しているとき、パラボラアンテナ4を介して第2のマイクロ波S5bを照射して次の目標地域を指向する。そして、第1のアンテナホーン3aがパラボラアンテナ4を介して目標地域への第1のマイクロ波S5aの照射を終えたとき、第1のアンテナホーンS5aは、直ちに、第2のアンテナホーン3bが指向した次の目標地域へ第1のマイクロ波S5aを照射させる。
(もっと読む)
追尾アンテナ装置の調整方法、及び追尾アンテナ装置
【課題】モノパルス追尾では、受信信号から生成した和信号と差信号を用いて方位角および仰角誤差を検出するが、和信号と差信号の群遅延差により誤りが生じる。この誤りを避けるためアンテナ追尾回路を校正する必要があるが、校正信号として連続波などの狭帯域な信号を用いた場合、位相の不定性により群遅延の補正に問題が生じる。
【解決手段】追尾アンテナの主反射鏡4上の仰角軸上の既知の位置に調整用アンテナ12を設置し、PSK変調波の調整用信号20を放射する。この時、調整用信号20とアンテナ指向方向の方位角は一致するため方位角誤差信号が0となるはずであり、アンテナ追尾回路の校正では和信号15と差信号16の群遅延差を可変遅延回路22、23で補正することでこれを0に調整する。
(もっと読む)
アンテナ取り付け装置
【課題】水平面に対して角度を有する場所においても、パッチアンテナの面(パッチアンテナの形成される基板表面)を、所定の角度に向かせることが可能なアンテナ取り付け装置を提供する。
【解決手段】本発明のアンテナ取り付け装置は、容器と、この容器に収容された液体と、液体より比重の軽い材料で形成され、液体に浮かべられた板部材と、板部材の表面に設けられ、上部面が液体の表面に対して設定された角度を有するアンテナ基板と、上部面に設けられた平面アンテナとを有する。
(もっと読む)
3軸望遠鏡の駆動角度制御方法
【課題】ジンバルロックの状態とならない3軸望遠鏡の駆動角度制御方法を提案する。
【解決手段】
3軸ジンバルに装着した望遠鏡を用いて人工衛星の追跡を行う場合に、xyz直交座標の人工衛星の単位位置ベクトル([r])を、方位角、仰角の極座標で表現し、その極座標から、3軸ジンバルのAz軸、El軸およびTr軸の駆動角度の方位角ψAz、仰角ψEl、追尾角ψTrを決定する際に、1)ψAzは、上記[r]のx軸上への射影の正負、かつ、y軸上への射影の正負、に応じて、所定の変換式に従い、2)ψElは、上記[r]のz軸上への射影が正の場合に、所定の変換式に従い、3)ψTrは、鏡筒光軸を含む平面上のuvw座標系の、u座標への上記[r]の射影の正負またはゼロ、かつ、u座標単位ベクトルと上記[r]の外積のw座標への射影の正負またはゼロ、に応じて、所定の変換式に従って変換する。
(もっと読む)
追尾アンテナ装置および位相変動補償方法
【課題】それぞれ独立に動作する複数の追尾アンテナ送受信装置における時間経過による位相変動を補償することができる追尾アンテナ装置および位相変動補償方法を提供する。
【解決手段】送信IF信号を複数の送受信装置10に所定の入力位相で分配する分配・移相器23を備え、各送受信装置10で送信IF信号を周波数アップコンバートされた後の送信RF信号を、周波数アップコンバートされる前の送信IF信号を逓倍した高調波成分を用いて低い周波数のダウンコンバート信号に変換する逓倍ダウンコンバート手段と、各送受信装置10のダウンコンバート信号から特性変動による各アンテナ間の相対位相差を検出する位相変動検出手段とを備え、分配・移相器23は、相対位相差の検出結果に基づいて複数の送受信装置10に分配する送信IF信号の各入力位相を制御し、各アンテナ間の位相変動を補償する構成である。
(もっと読む)
追尾装置及び追尾方法
【課題】飛行体に搭載された追尾アンテナと地上アンテナとの相対的な位置姿勢関係の変動値と互いの位置関係から制御モードを判定し、追尾アンテナ目標値を生成し、空間上を互いに移動する無人機と地上局に対して追尾アンテナ制御を実施する。
【解決手段】飛行体は飛行体位置推定信号と地上局情報予測信号に基づいて飛行体アンテナ制御モード信号を生成する飛行体アンテナ制御モード判定手段と、飛行体位置推定信号、地上局情報予測信号、飛行体アンテナ制御モード信号に基づいて飛行体アンテナ目標値信号を生成する飛行体アンテナ目標値生成手段を備え、地上局は地上局位置推定信号と飛行体情報予測信号に基づいて地上局アンテナ制御モード信号を生成する地上局アンテナ制御モード判定手段と、地上局位置推定信号、飛行体情報予測信号、及び地上局アンテナ制御モード信号に基づいて地上局アンテナ目標値信号を生成する地上局アンテナ目標値生成手段を備える。
(もっと読む)
モノパルス給電回路
【課題】本発明は、複数のアンテナに並行して到来した到来波の和と差とのパターンを得ることにより、その到来波の到来方向の計測等を可能とするモノパルス給電回路に関し、従来例に比べて構成が簡略化され、かつ実装上の制約の緩和が大幅に図られると共に、軽量化および小型化が可能であることを目的とする。
【解決手段】互いに貫通して交叉する導波路を形成する第一の導波管と、前記第一の導波管の側壁の内、前記導波路が交叉する部位に突設され、前記導波路を拡張する第二の導波管とを備え、前記導波路の4つの末端から前記部位までの長さは、個別に点対称に配置された2対のアンテナの個々の給電点から前記4つの末端をそれぞれ介して前記部位に至る4つの区間の伝搬路長が同じとなる値に設定される。
(もっと読む)
測角装置および測角装置の設計方法
【課題】演算装置規模が小さく、且つ広帯域信号を観測していても1回の測角処理で到来信号の入射角度を推定する測角装置を得る。
【解決手段】測角装置は、信号を観測する複数のセンサと、上記センサでの観測により得られた時系列データの統計処理を行う手段と、上記統計処理による統計処理結果を用いて上記信号の入射角度を測角する手段と、を備える測角装置において、上記統計処理を行う手段は、各上記センサでの観測により得られた時系列データを周波数データに変換する手段と、上記周波数データを複数の周波数帯域のブロックに分割する手段と、上記分割されたブロック毎の周波数データを上記センサの位置に関して補間処理する手段と、を備える。
(もっと読む)
フェーズドアレイレーダ装置およびこれを備えた車両
【課題】1台のフェーズドアレイアンテナによって方位角方向だけでなく仰角方向の捜索ないし追尾が可能とされたフェーズドアレイレーダ装置を提供する。
【解決手段】複数の素子アンテナが平面上に並べられて配置され、各素子アンテナから送受信される電波の位相量を変化させて所望方向の目標物を捜索ないし追尾する1台のフェーズドアレイアンテナ本体7と、方位角方向および仰角方向にフェーズドアレイアンテナ本体7の姿勢を制御する姿勢制御手段9とを備えている。姿勢制御手段9は、鉛直軸線V回りに回転する回転台14と、下端が回転台14に対して第1水平軸線H1回りに回動自由に接続されると共に、他端がフェーズドアレイアンテナ本体7に対して第2水平軸線H2回りに回動自由に接続されたリンク16とを備えている。
(もっと読む)
衛星再サーチ手段
【課題】
仰角を固定し、アンテナを360度回転しながら受信強度の測定を行い、最も強い受信波になる方位角をサーチする方法であると、衛星切り替えの際の再サーチ時間が無視できない長さになる。また、ブロッキング状態になると、最適な衛星方向への指向が失敗してしまうことにもなりかねない。
【解決手段】
車両や船舶等の移動体に搭載される移動体搭載用衛星自動追尾装置であって、衛星を切り替える必要が生じた場合の衛星再サーチ手段において、移動体が移動している場合に、GPSから移動体の緯度経度を測位して次に捕捉する衛星の緯度経度を取得する衛星位置算出手段と、前記衛星位置算出部が取得する衛星の方位からGPSによって得られるヘディング角を減算してベアリング角を計算するベアリング角算出手段からなり、アンテナを前記ベアリング角だけ回転させることを特徴とする衛星再サーチ手段である。
(もっと読む)
レーダシステム及びそれに用いるアクティブフェーズドアレイアンテナ装置並びに送信モジュール
【課題】 レーダシステムにおけるアクティブフェーズドアレイアンテナ装置において、レーダモード動作機能と、探知した目標物に対して瞬時に強力なマイクロ波を送信することによる攻撃型の妨害モード動作機能とを有するデュアルモード動作を可能とした送信モジュールを提供する。
【解決手段】 レーダシステムにおけるアクティブフェーズドアレイアンテナ装置の送信モジュール1であって、入力される励振信号を増幅してアンテナへ出力するデュアルモード進行波管3と、このデュアルモード進行波管3に対して印加する駆動電圧を、レーダモード動作と妨害モード動作に対応した電圧に切替制御する制御回路2とを含むことを特徴とする。
(もっと読む)
トリプレート型平面アンテナ
【課題】
トリプレート型平面アンテナでは、給電線路からの放射を抑圧するため、給電線路はスロット開口間の導体の下側で引き回す必要があるが、配列基準方向に対して偏波を回転する必要がある場合、一般には放射素子を回転する方法が用いられているため、給電線路を引き回す隙間が狭くなり、給電線路どうしが近接して線路間結合が大きくなってしまう。
【解決手段】
第1の誘電体上に、放射素子と給電線路を形成したアンテナ回路基板を設置し、第2の誘電体上に、電波放射を目的とするスロット開口を有するスロット板を設置し、第2の誘電体の下方に前記アンテナ回路基板を重ねる際に、スロット開口が放射素子の真上になるように配置するものであって、第3の誘電体上に、放射素子及びスロット開口の配列の基準方向に対して、角度θだけ傾斜した偏波グリッドを形成した偏波グリッド基板を設置し、スロット板の上部に前記第3の誘電体を配置することを特徴とする。
(もっと読む)
RFIDタグテープを使用した在庫追跡のための方法およびシステム
【解決手段】在庫追跡方法は、複数のRFIDタグに対応する複数の無線自動識別(RFID)の値をひとつの在庫品に関連付けることと、複数のRFIDタグの複数のアンテナ軸が複数の方向に方向付けられるように、在庫品の複数の表面に複数のRFIDタグを添付することと、ひとつ以上のアンテナを備えるアンテナアレイを使用して、在庫中の品物に添付されたRFIDタグを無線検知することと、在庫品に関連付けられた複数のRFIDの値のうちのひとつ以上が検知された場合、在庫品が在庫に在ると決定し、そうでなければ在庫品が在庫にないと決定することと、を含む。 (もっと読む)
電子キーシステムの通信エリア形成装置
【課題】通信マスタのアンテナ数を削減でき、しかも電子キーの位置検出精度も確保することができる電子キーシステムの通信エリア形成装置を提供する。
【解決手段】スマート通信の車両送信アンテナである車両発信機10を、互いにアンテナ軸が直交する一対のコイルバーアンテナ16a,16bを備えた2軸一体アンテナとする。車外照合の際には、第1コイルバーアンテナ16aのみを単独送信させて第1通信エリアE1を形成し、次にコイルバーアンテナ16a,16bを同相で同時送信させて第3通信エリアE3を形成し、続いてコイルバーアンテナ16a,16bを逆相で同時送信させて第4通信エリアE4を形成して、車両周囲に車外通信エリアを形成する。また、車内照合の際には、第2コイルバーアンテナのみを単独送信させて第2通信エリアE2を形成し、車両1に車内通信エリアを形成する。
(もっと読む)
放送用電波自動追尾装置
【課題】受信用パラボラアンテナの部品点数を削減して、なおかつ、受信用パラボラアンテナの受信特性を良好にして送信源に精度良く追尾できるようにする。
【解決手段】回転台4には、受信用パラボラアンテナ1とその受信信号を増幅するLNA3とを搭載し、受信用パラボラアンテナ1は、その反射面の中央部に1個の一次輻射器2が設けられた構成をなしている。制御部10からの制御信号により、回転台4は受信用パラボラアンテナ1を、その一次輻射器2の先端部が一筆書きのパターン形状の旋回軌道に沿って移動することにより、旋回動作させ、その受信信号を基に、制御部10は受信用パラボラアンテナ1から見た送信源の方向を探索し、この探索結果をもとに回転台4の動作を制御する。受信用パラボラアンテナ1は、送信源を追尾しながら、旋回動作を繰り返す。
(もっと読む)
アンテナ装置
【課題】飛翔体に搭載されるアンテナ装置において、常時、通信電波の通信相手との通信を確保できるようにする。
【解決手段】飛翔体1に搭載され、所定の通信相手20からの電波を受信するアンテナ装置10であって、飛翔体1の周方向に配置される複数のアンテナ3a,3b,3c,3dと、送受信機6と、複数のアンテナのうち、通信相手20の側を向いているアンテナを識別し、該アンテナのみに送受信機を接続するアンテナ切換装置7と、を備える。
(もっと読む)
曲面反射鏡アンテナ及びそれを用いた位置計測システム
【課題】ある平面内における所望の指向性又は無指向性を有しながら、その平面方向の利得を高めたアンテナを提供すること。同時に無指向性のアンテナにより測位精度を高めた位置測定システムを提供すること。
【解決手段】 本発明の曲面反射鏡アンテナは、放物線の焦点を通り該放物線の中心軸に直交する直線を回転軸として該放物線の頂点から遠い側の曲線の一部を回転して形成される曲面の全部又は一部を反射鏡とし、該焦点の位置に給電部を設けたことを特徴とする。また、このような等方性をもつ複数の曲面反射鏡アンテナにおける受信電波の干渉結果に基づいて電波送信源の位置を特定する。
(もっと読む)
1 - 20 / 117
[ Back to top ]