
JUKI株式会社により出願された特許
41 - 50 / 1,557
マウンタ装置の加圧制御ヘッド
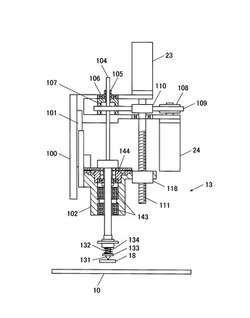
【課題】マウンタ装置において、加圧速度を適切に切り替えて加圧時間を短縮する。
【解決手段】部品を吸着するノズル131の高さを位置決めするサーボモータ23と、ノズル131が吸着した部品を基板に押し付ける荷重を制御できる加圧制御ヘッド13とを備えるマウンタ装置であって、ノズル131の先端に組み込まれた衝撃緩衝ばね132と、ノズル131が吸着した部品を基板面に押し付ける圧力を検出するセンサとを備え、サーボモータ23の駆動によりノズル131が吸着した部品を基板面へと等速で下降させ、圧力センサにより衝撃緩衝ばね132の圧縮による反発力を検知した後、当該衝撃緩衝ばね132の圧縮が完了するまでにノズル131の下降速度を減速させる。
(もっと読む)
電子部品実装装置のライン制御装置

【課題】生産設備のいずれか1つの生産ラインで生産できない電子回路基板であっても、複数の生産ラインを組み合わせて生産することができる場合に、生産ライン投入への前後関係を厳密にチェックしながら生産を行うことができる。
【解決手段】電子部品実装装置のライン制御装置において、各生産ライン中で最も始めの電子部品実装装置の入側に設けられた、搬入する電子回路基板をそれぞれ識別するための識別子を読み取る手段と、読み取られた識別子情報に基づいて、前記電子回路基板の各生産ラインへの投入順序を含む生産履歴情報を保存する手段と、前記識別子により識別された今回の電子回路基板の当該生産ラインへの投入順序が、生産条件で設定された当該生産ラインへの投入順序と一致しているかどうかをチェックする手段と、を備える。
(もっと読む)
電子部品実装装置
【課題】電子部品や基板の損傷を防止する。
【解決手段】ヘッド106に固定された本体部60と、本体部で昇降動作を行う昇降体14と、昇降体を昇降させる昇降機構20と、吸着ノズルを下端部に保持する中空のノズルシャフト30と、スプラインナット55を介してノズルシャフトを回動させる回動機構50と、吸着ノズルが受ける上方への荷重を検出する荷重検出部40と、荷重検出により荷重制御を行う動作制御部70とを備え、昇降機構と回動機構とが本体部に支持され、ノズルシャフトの上端部が前記本体部の上部から突出装備され、荷重検出部が昇降体又は本体部に支持されることを特徴とする。
(もっと読む)
部品実装装置
【課題】リニアモータを用いた直動機構において、部品寿命の延長と部品搭載精度の悪化防止とを実現することができる部品実装装置を提供する。
【解決手段】部品実装装置1は、リニアモータを用いたY直動機構30及び40によって搭載ヘッド12が装着された移動ビーム13をY方向に移動する。Y直動機構30は、X方向に軸線を一致して移動ビーム13のX方向の左端に回動自在に連結されると共に、X方向に摺動可能なように基台10に配設されたフレーム14a上に載置される転がり機構により構成する。また、Y直動機構40は、基台10に配設されたフレーム14bに固定されY方向に延在するガイドレール45と、移動ビーム13のX方向の右端に固定されガイドレール45に摺動自在に嵌合するスライダ44とを備えるガイド機構により構成する。
(もっと読む)
ミシン
【課題】ヒッチステッチを防止する。
【解決手段】針棒12の中心線C回りに回動可能な回動台43と、回動モータ463と、ミシンモータ21から釜13に動力を伝える入力軸41及び出力軸42と、軸間の位相差を変更調節する差動伝達機構40とを備え、差動伝達機構は、中心線上に入力軸と出力軸を配置し、その回りを回動可能な支持枠441と、支持枠に対して回動可能であって、軸間で互いに逆に回転を伝達する伝達体445とを備え、支持枠に設けられた第一の従動部材461と、回動台に設けられた第二の従動部材462と、第一の従動部材に回動を付与する第一の主動部材464と、第二の従動部材に回動を付与する第二の主動部材465とを有し、第一の主動部材から第一の従動部材への回転伝達量を第二の主動部材から第二の従動部材への回転伝達量の二分の一とし、第一の主動部材と第二の主動部材とが同時回転を行うように同一軸上に固定装備した。
(もっと読む)
電子部品実装装置
【課題】基板を搬送する時間の増加を抑制すること。
【解決手段】電子部品実装装置100は、基板に電子部品を実装する装置である。電子部品実装装置100は、複数のステージ3FI、3RI、3FE、3REを有している。これらは、電子部品を搭載する基板を搭載して支持する。電子部品を搭載する基板は、基板供給部1から基板搬出部2へ搬送される。2つのステージ3FI、3RIは、基板の搬送方向と直交する方向に配列され、その方向に移動する。また、2つのステージ3FE、3REも、基板の搬送方向と直交する方向に配列されてその方向に移動する。
(もっと読む)
ベルトループ付けミシン及びベルトループの折り返し方法
【課題】ベルトループを適正に縫着することができるベルトループ付けミシン及びベルトループの折り返し方法を実現する。
【解決手段】ベルトループBの中央側へ折り返す端部(一端部b1、他端部b2)がその中央側からはみ出すことが想定される場合に、その一端側が固定されたベルトループBを挟持したループクランプ31を、ベルトループBの長手方向と交差する方向であって、そのはみ出しを打ち消す方向に所定量移動させた後に、フォーク部材38でベルトループBの端部を折り返すようにすることで、その端部をベルトループBの中央側に折り重ねることが可能になって、ドッグイヤーの発生を抑えることを可能にした。
(もっと読む)
立体形状認識装置
【課題】認識精度を高く維持しつつ処理を軽くする。
【解決手段】複数方向から照明光を照射する照明手段2と、対象物を撮像する撮像手段1と、これらの制御部120とを備え、照度差ステレオ法を用いて、複数の撮像画像データとそれぞれの照射方向とから撮像画像を構成する画素ごとに法線ベクトルを算出する立体形状認識装置10において、撮像画像を構成するそれぞれの画素について、複数の撮像画像データの同じ位置の画素における複数の輝度値を、予め定めた絞り込み条件に従って絞り込む選出部21と、撮像画像を構成するそれぞれの画素について、選出部により絞り込まれた同じ位置の画素における複数の輝度値に基づいて法線ベクトルを算出する算出部22とを備ている。
(もっと読む)
ミシン用ステッピングモータ制御装置及びミシン
【課題】ミシンに使用されるステッピングモータの消費電力を低減すること。
【解決手段】ミシン用ステッピングモータ制御装置1は、偏差生成部40と、駆動信号生成部41と、ゲイン調整部43と、を含む。偏差生成部40は、ステッピングモータ30に対する電流指令値Icとステッピングモータ30に流れる駆動電流値Idとの偏差dを求め、偏差dに所定のゲインGを与えた電流値偏差Dを生成する。駆動信号生成部41は、電流値偏差Dから駆動信号Sdを生成する。コイル34a、34bの自己誘導によって流れる電流をコイル34a、34b自体に還流するように駆動回路が制御される省電力制御が行われる場合において、駆動電流値Idの絶対値を減少させる必要があるときには、駆動電流値Idの絶対値を減少させる必要がないときよりもゲインGを大きくする。
(もっと読む)
ミシン
【課題】糸払いのミスを低減する。
【解決手段】糸切り装置と糸払い機構70とそれらの制御手段100とを備えるミシン10において、縫い針11の上下動と同じ周期で回転を行う駆動軸の軸角度の検出手段22を備え、制御手段が、検出手段の検出に基づいて、糸切り装置により上糸が切断されるより先に初期位置から動作位置へのワイパの前進動作が行われるように駆動手段73を制御することを特徴とする。
(もっと読む)
41 - 50 / 1,557
[ Back to top ]