
Fターム[2B043EA03]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 操舵又は操向の状況 (291) | 直進の状況 (19)
Fターム[2B043EA03]に分類される特許
1 - 19 / 19
乗用管理機
苗移植機
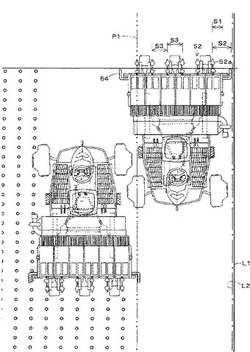
【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
(もっと読む)
作業車両

【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
走行車両
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、自由操向可能なキャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることができること。
【解決手段】第1・第2駆動部に要求される必要駆動トルクを算出する駆動トルク算定部と、傾斜横切り走行時における目標走行方向と実走行方向との方向ずれを解消する補償トルクを第1・第2駆動部に対して車両の傾斜度に基づいて算出する補償トルク算定部と、必要駆動トルクと補償トルクとに基づいて制御量を補正する補正部とが含まれている。
(もっと読む)
トラクタ
【課題】左右ブレーキの連結を自動的に確保し、路上走行の安全を図る。
【解決手段】走行車体に左右に並設されている左右ブレーキぺダルと、該左右ブレーキぺダルを連結状態としたりあるいは非連結状態とするブレーキ連結解除手段と、ロータリ耕耘装置を昇降回動するリフトアームと、作業モードを走行軽作業モードと耕耘重作業モードに切り換える作業切換ダイヤルと、前記リフトアームの昇降状態を検出するリフトアーム昇降センサと、前記ブレーキ連結解除手段を切換作動するブレーキ連結解除アクチュエータとを備えたトラクタにおいて、前記作業切換ダイヤルを耕耘重作業モード以外への切換状態で、前記リフトアーム昇降センサが前記リフトアームの所定高さ以上の上昇検出をすると、左右ブレーキ連結解除アクチュエータを連結作動し非連結状態にあるブレーキ連結解除手段を左右連結状態にするコントローラを設けたことを特徴とするトラクタとする。
(もっと読む)
田植機
【課題】操作者が植付部に苗を補給している間であっても、苗を整列させて植付けることができる田植機を提供する。
【解決手段】CPUは、自動走行スイッチがオンになっている場合に、左右方向において、表示部に表示された線の中央と苗の列との距離を求め、求めた距離に応じた操舵量を演算する。操舵量を演算したCPUは、電磁切換弁201に切換信号を出力する。走行部1は、演算された操舵量だけ右又は左に操舵される。操舵終了後は、電磁切換弁201を中立位置に戻し、走行部を直進させる。
(もっと読む)
コンバイン
【課題】デバイダが穀稈の株を割らずに分草し、円滑に穀稈を搬送すると共に乱れなく穀稈を刈取り可能な8条刈りのコンバインを提供する。
【解決手段】8条刈りのコンバイン1は、9本のデバイダを有していると共に、これら9本のデバイダのうち左端から数えて4番目、右端から数えて6番目の機体内側のデバイダを刈取り基準位置としている。上記9本のデバイダは、刈取り基準位置のデバイダが左右の穀稈の中央に位置する際、尺植え及び尺一寸植えのどちらでも穀稈の株を割らないように配設されている。また、この刈取り基準位置のデバイダを支持するデバイダフレーム23aには、方向自動制御用の方向センサ18が取付けられており、この方向センサ18の左右のセンサバー18L,18Rと穀稈とが接触すると、その接触した側のセンサバー18L,18Rとは逆方向に機体の進行方向が修正される。
(もっと読む)
刈取収穫機
【課題】 機体を自動操向操作により走行させながら植立茎稈の刈取作業を行うことが可能でありながら、植立茎稈の刈残し等が発生しない良好な状態で且つ能率よく刈取作業を行うことが可能となる刈取収穫機を提供する。
【解決手段】 対地位置検出手段にて求められる機体の対地位置情報に基づいて機体が作業対象領域内の設定経路に沿って走行するように、機体の向きを変更操作自在な操向操作手段29を制御する制御手段Hが備えられ、その制御手段Hが、設定経路における植立茎稈を刈り取る刈取用経路部分を走行するときに、対茎稈位置検出手段83にて検出される植立茎稈に対する機体の横幅方向の位置が刈取用の適正位置から外れると、対地位置検出手段の検出情報にかかわらず、対茎稈位置検出手段83の検出情報に基づいて機体の横幅方向の位置が適正位置になるように操向操作手段29を制御する。
(もっと読む)
自走式作業台車
【課題】 作業ユニットを安定的に支持することができるとともに、傾斜地でも安定して走行しながら作業を行うことができる自走式作業台車を提供すること。
【解決手段】 走行体本体4、前輪24及び後輪を備えた自走式走行体と、走行体本体4に設けられた支柱54と、支柱54に取り付けられた支持フレーム74と、支持フレーム74に装着された作業ユニット140と、支持フレーム74の先端部に設けられた支持・操作手段110と、を具備する。前輪24及び後輪の少なくともいずれか一方は駆動輪として機能し、また前輪24及び後輪の少なくともいずれか一方は操舵可能であり、更に、支持フレーム74は、支柱54を中心として180度以上の角度範囲にわたって旋回自在に支持されているとともに、仰俯角が水平方向を基準に5度以上となるように上下方向に揺動自在に支持されている。
(もっと読む)
移動車両の直進誘導システム
【課題】運転者の負担を軽減し、熟練者でなくても高能率・高精度な作業ができる移動車両の直進誘導システムを提供する。
【解決手段】この移動車両の直進誘導システムは、移動車両搭載部1、移動車両が直進走行すべき走路前方の延長線上に設置される遠方目標部2を備える。移動車両搭載部1はカメラ部11、カメラ部11からの画像を処理し走行情報を出力する画像処理部12、走行情報に基づき移動車両を制御する車両制御部14,操向制御機構15を有する。遠方目標部2はカメラ部11の撮像周期と最大露光時間の合計時間以上で撮像周期の2倍以下の時間の点灯と消灯とを繰り返す。画像処理部12は現フレームと前フレーム及び、現フレームと前々フレームにおいて第1,第2の遠方目標部候補画素を抽出し、第1,第2の遠方目標部候補画素を統合し、統合した遠方目標部候補画素に対し遠方目標部2の位置検出を行い、検出結果に基づき走行情報を生成する。
(もっと読む)
作業車
【課題】ロータリ耕耘装置を下降位置から上昇させる際に形成される耕耘跡の発生を防止でき、圃場での農作業の作業性を向上させることのできる作業車を実現する。
【解決手段】走行車体1の後部に装備されたロータリ耕耘装置Fを昇降駆動する昇降機構8,9と、操作指示を出す操作指示手段37と、を備え、操作指示手段37からの操作指示に基づいて、ロータリ耕耘装置Fを予め設定された中間位置から上昇位置まで上昇させる速度よりも低速で、ロータリ耕耘装置Fを下降位置から中間位置まで上昇させるように、昇降機構8,9を駆動させる耕耘装置自動上昇手段を備えて、作業車を構成する。
(もっと読む)
作業車
【課題】運転者に違和感を与えることなく、無理なく走行車体を自動操向することができ、農作業等の作業性を向上させることができる作業車を実現する。
【解決手段】作業車に、ステアリングハンドル6に連結されたハンドル操作軸6aによる第1操作変位と、自動操向制御量に基づいて駆動する駆動軸30aによる第2操作変位とを入力操作変位として入力するとともに、第1操作変位と第2操作変位の間の差動変位を出力操作変位としてステアリング装置12の入力軸18aに出力するステアリング差動機構20を備える。
(もっと読む)
農用作業車
【課題】自律的に直進走行する農用作業車において、次工程への遷移時に走行経路の位置決めが容易にでき、かつ、目標経路と実際の走行経路を略一致させることができる技術を提供する。
【解決手段】GPSユニット102と処理部110を備え、GPSユニット102により計測される位置情報に基づいて処理部110によりティーチング経路を生成し、該ティーチング経路に沿って自律走行させるようにした田植機1において、ティーチング開始点(点A)とティーチング終了点(点B)をGPSユニット102により計測し、処理部110により、点Aと点Bを結ぶ直線状のティーチング経路(線分AB)を生成し、かつ、線分ABと、車体に装着した植付部4において設定する作業幅(即ち、植付幅aに植付条数bを乗じた距離)を基準として、線分ABに対して平行で、作業幅だけ離間したN本の直線状の目標経路を生成する。
(もっと読む)
作業車両
【課題】操向ハンドル10の回動操作に応じて走行機体を左又は右に旋回させる構成の作業車両において、走行機体の進行方向を修正する際に、操向ハンドル10を細かく切り足したり切り戻したりする手間をなくす。
【解決手段】操向ハンドル10のハンドルホイル部94に、走行機体の進行方向を微調節操作するためのステアリングスイッチ100を備える。ステアリングスイッチ100における左右方向の操作は、操向ハンドル10の回動操作に拘らず、常に許容される構成にする。すなわち、ステアリングスイッチ100と操向ハンドル10とは互いに独立的に操作し得るように構成する。そして、操向ハンドル10の単位操作量に対する走行機体1の旋回動作量は、ステアリングスイッチ100の単位操作量に対する走行機体1の旋回動作量と比べて格段に大きく設定する。
(もっと読む)
圃場作業車両
【課題】別途設定による目標方位がずれている場合の修正操作を容易にして、作業性及び作業効率を向上し、簡易な構成で信頼性の高い制御部により自律直進操舵制御が適正に行われる圃場作業車両を提供することにある。
【解決手段】機体方向を示す機体方位情報に基づき、別途設定された往復工程の目標方位に対する機体方位の偏差が小さくなる方向に操向装置の舵角を操作する自律直進操舵制御を行う制御部を備える圃場作業車両において、目標方位を修正する手動操作具を設け、該手動操作具による修正方位量を記憶し、以後の往復工程の目標方位を記憶された修正方位量に基づいて自動修正する圃場作業車両。
(もっと読む)
移植機
【課題】旋回中のスリップなどに影響を受けることなく、一定のタイミングで植付クラッチを自動的に入操作し、各行程の植付開始位置を精度良く揃える。
【解決手段】走行機体1に連結される植付部3と、該植付部3への動力供給を入切する植付クラッチとを備える乗用田植機(移植機)において、走行機体1の左車輪回転及び右車輪回転を検出し、その検出信号に基づいて植付クラッチを自動的に入操作する制御装置9を備え、該制御装置9は、左右車輪8の回転差が所定以上となることに基づいて旋回開始を判断し、旋回開始判断後、左右車輪8の回転差が所定以下となることに基づいて旋回終了を判断し、さらに、旋回終了を判断してから所定距離走行後に植付クラッチを自動的に入操作する。
(もっと読む)
圃場作業車両
【課題】簡易な構成で信頼性の高い制御部により自律直進操舵制御の不安定化を回避して異常走行を確実に防止することができる圃場作業車両を提供する。
【解決手段】圃場作業車両1は、機体方向を示す機体方位情報9に基づき、別途設定の目標方位に対する機体方位の偏差が小さくなる方向に操向装置の舵角を操作する自律直進操舵制御を行う制御部21を備えて構成され、上記制御部21には、方位偏差の低減に適する走行速度を基準速度として別途設定し、機体の走行速度情報25に基づいて同走行速度が上記基準速度に満たない範囲について上記自律直進操舵制御を強制解除するものである。
(もっと読む)
操向制御方法及び装置
【課題】
視界に入っている一行程前に移植された苗一列全てに対してただ一つの直線を定め、これに対して平行に移植機を走行させる。
【解決手段】
移植機に設けた撮像手段によって既植の苗列を撮像して苗列の画像情報を取得するステップと、該画像情報から苗列領域が抽出された2値画像を取得するステップと、該2値画像を逆透視変換して2値化された苗列領域の仮想地平面画像を取得するステップと、該仮想地平面画像において該苗列領域を直線で近似するステップと、該直線に対する移植機の位置情報に基づいて操向制御を行うステップとを有する。
(もっと読む)
1 - 19 / 19
[ Back to top ]